天龙M10 M20_中文手册.pdf - 第329页
10.元件短缺和出错对应方法 10-13 DI/DO信号 DI/DO 就是数字输入/数字输出。DI 表示从各传感器传送过来的信号的输入, DO 则表示向各机构操作送去命令信号的输出。 通过 DO,向机构操作输出动作的命令,并对是否处于正常动作状态加以检查。 根据该项 DO 操作,通过 DI 监视器对马达、机构操作等位置、传感器的 ON/OFF 状态进行检查。 DI 监视 可以了解到各个传感器现在的状态(ON 或者 OFF)。 “1”表示…
10.元件短缺和出错对应方法
10-12
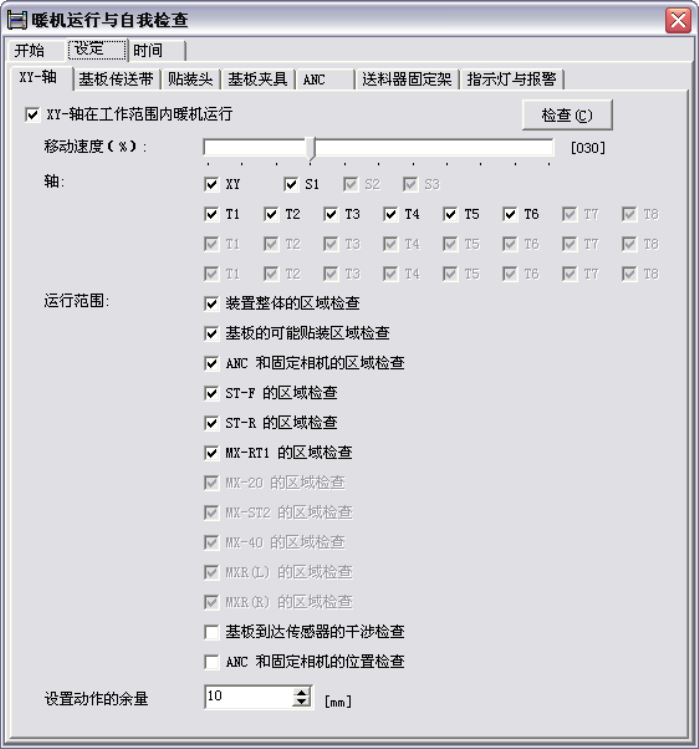
■ 设定
可以对 XY-轴、基板传送带、贴装头、基板夹具、ANC、送料器固定架、指示灯与报警的各个项目
分别进行详细设定。选上左上方的复选框,点击右上方的<检查>按钮,在窗口中指定的部分就开
始进行暖机运行。
此外,只有在左上方的复选框被选上的情况下,当点击[开始]窗口中的<开始>按钮时,该项目
才能成为暖机对象。如果复选框没有被选上,即使在[开始]窗口中点击<开始>按钮,也不能进
行暖机操作。
对于[动作计数]、[等待时间]等栏中的数值,通常情况下请按照初始设定值直接使用。
■ 时间
对暖机的运行间隔进行设定。在设定的暖机运行间隔时间结束后,系统再进行起动时,会询问是
否需要进行暖机运行。能够以 1 小时为单位进行设定。
【注释】 如果时间输入值为 0,即使系统在起动时,也不会有是否需要暖机运行的询问信息。
注意:根据机种的不同,
贴装头数/Z 轴数/T 轴数
也有所差异。
10.元件短缺和出错对应方法
10-13
DI/DO信号
DI/DO 就是数字输入/数字输出。DI 表示从各传感器传送过来的信号的输入,
DO 则表示向各机构操作送去命令信号的输出。
通过 DO,向机构操作输出动作的命令,并对是否处于正常动作状态加以检查。
根据该项 DO 操作,通过 DI 监视器对马达、机构操作等位置、传感器的 ON/OFF 状态进行检查。
DI 监视
可以了解到各个传感器现在的状态(ON 或者 OFF)。
“1”表示 ON,“0”表示 OFF。
如果传感器感知到开关、马达、机构操作等的动作,就会将 DI 的变化显示出来。
另外,还可以在发现传感器故障或者断线时加以使用。
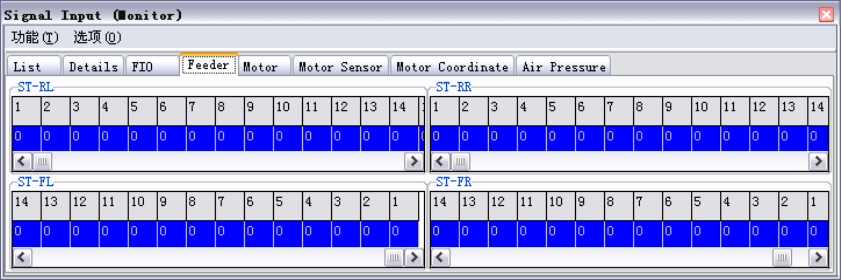
【菜单】 手动>DI/DO 信号>Signal Input(Monitor)
■ 数字输入(一览)……未使用
■ 数字输入(详细)……未使用
■ FIO…………未使用
■ 送料器
如果没有安装送料器时,将显示为“1”。
如果安装有送料器时,则显示为“0”。
上段是前侧送料器固定架的 DI 监视。
下段是后侧送料器固定架的 DI 监视。
10.元件短缺和出错对应方法
10-14
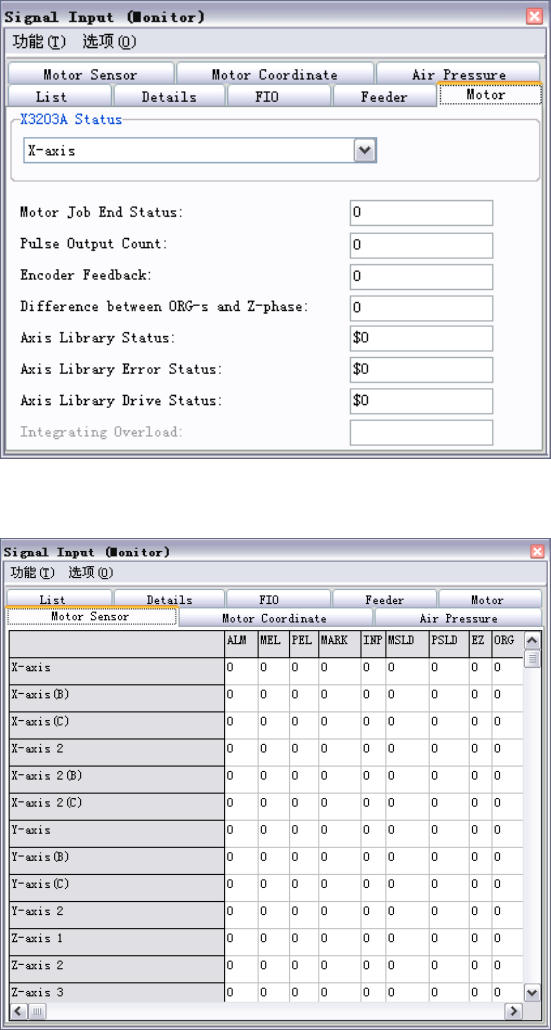
■ 马达
■ 马达传感器
【項目】
ALM: (Alarm) 报警
MEL: (Minus End Limit) 负极限
PEL: (Plus End Limit) 正极限
MARK: (Mark) 标记
INP: (In Position) 在位
MSLD: (Minus Slow Down) 负慢降
PSLD: (Plus Slow Down) 正慢降
EZ: 0相
ORG: (Origin) 原点