天龙M10 M20_中文手册.pdf - 第260页
5.资料库的制作与编辑 5-96 ④ 在[开始点]栏中,按键输入此时接近状态的 Z 座标值。 ⑤ 点击<上面教示>按钮。将会出现下列确 认画面,点击<确定>按钮。就会从按键输入的[开始 点]的高度开始,对元件上面进行搜索。吸嘴则在吸引的同时,开始缓慢下降。 ⑥ 如果吸嘴接触到元件上面,真 空压力上升,吸嘴的下降将会停止,出现下列的确认画面。如 果点击<是>按钮,就会将此时的 Z 坐标值作为[元件上面高…
5.资料库的制作与编辑
5-95
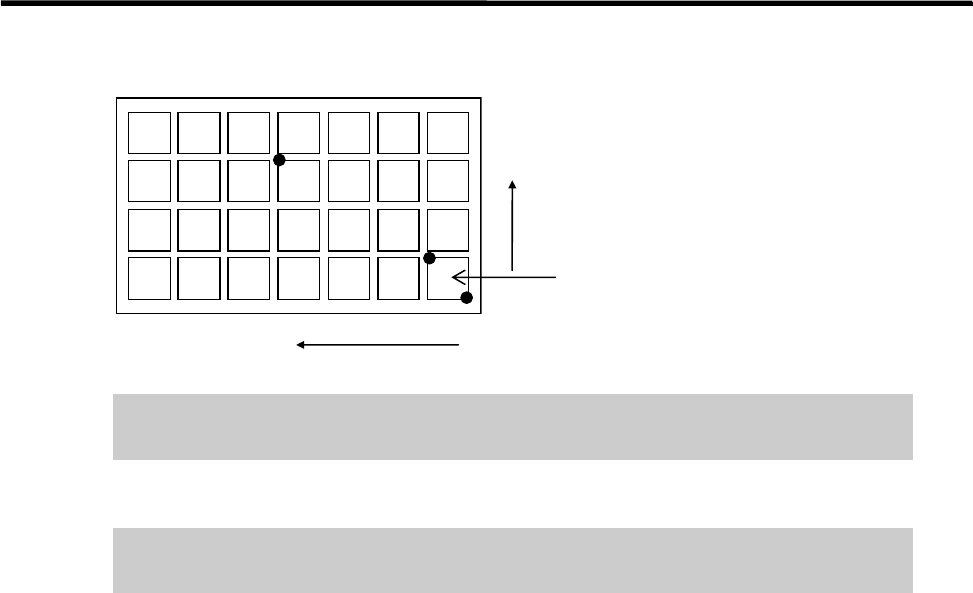
⑹ 下面将对以下的 3 点进行检测。
这时基板相机不能对矩阵盘全体进行检测,也没有必要进行全体检测。在基板相机可以移
动的范围内,对从第一吸取点到最远的第 3 点进行检测。第 3 检测点必须与事先输入的 XY
的元件个数相对应。
这样,第 1 吸取点的坐标和元件的间隔就会被计算出来,加以输入。
在检测输入后请将实际的 X 或者 Y 方向的元件个数进行修正输入。贴片机将会通过(X 方向
的元件个数)X(Y 方向的元件个数),对送料盘的元件个数进行计算,发出诸如元件短缺等
的错误信息。
⑺ 然后进行[矩阵盘资料库]中[元件上面高度]的检测输入。由于这是 Z 轴检测,需要先把吸
嘴安装到贴装头上。(推荐使用不带有胶片的 No.5~6 号的吸嘴)
⑻ 在[轴的指定]栏中指定“XY”轴,在[贴装头的指定]栏中指定安装有吸嘴的贴装头序号,
在[X 列]栏中输入“1”,在[Y 行]栏中输入“1”,然后点击<矩阵盘取点>按钮,该贴装
头就会移动到第一吸取点。
⑼ 将复印纸大小的 1 张纸置放在检测元件之上。在[轴的指定]中选择[Z 轴],通过[轴速度]
的设定使吸嘴缓慢下降。停止的位置通过拉动夹在吸嘴和元件之间的纸张进行定位,刚好夹紧
的位置为理想位置。
⑽ 从[检测]中读取这时的 Z 的坐标值,用键盘将从 Z 值中减去 0.1mm 所得的值(吸嘴接触元件
只需要下压 0.1mm 的距离),在[元件上面高度]中进行输入。
⑾ 点击<关闭>按钮,将[检测]窗口关闭。
⑿ 选择“文件>保存”,进行数据的保存。
【注释】 上述[元件上面高度]的检测输入,可能会有与吸嘴冲突的危险。因此,建议使用游标卡尺等仪
器对矩阵盘的高度进行实际测量,然后再进行按键输入。
● 根据真空压力自动检测[元件上面高度]
除了上述将吸嘴下降到元件上面进行检测的方法之外,还有将吸嘴接触到元件上面,利用真空压
力的上升,自动进行检测的方法。
【操作】
①
将 No.5 号吸嘴安装到[贴装头的指定]栏中指定的贴装头上。
【注释】 请务必使用不带胶片的 No.5 号吸嘴。
②
在[轴的指定]栏中指定“XY 轴”,在[贴装头的指定]栏中指定安装有吸嘴的贴装头序号,
在[X 列]栏中输入“1”,在[Y 行]栏中输入“1”,然后点击<矩阵盘取点>按钮,该贴装
头就会移动到第一吸取点。
③
在[轴的指定]中指定“Z 轴”,在[贴装头的指定]中指定安装有吸嘴的贴装头序号。然后
通过目视,将吸嘴缓慢地下降到元件上面,直到还有几毫米为止。
【注释】 此时,只是将吸嘴靠近元件上面即可。没有必要将吸嘴接触到元件上面。当然也需注意不要让吸
嘴顶入到元件上面。
X=4
Y=3
3 点检测的位置将在检测窗
口中被图形显示出来。
第一吸取点
5.资料库的制作与编辑
5-96
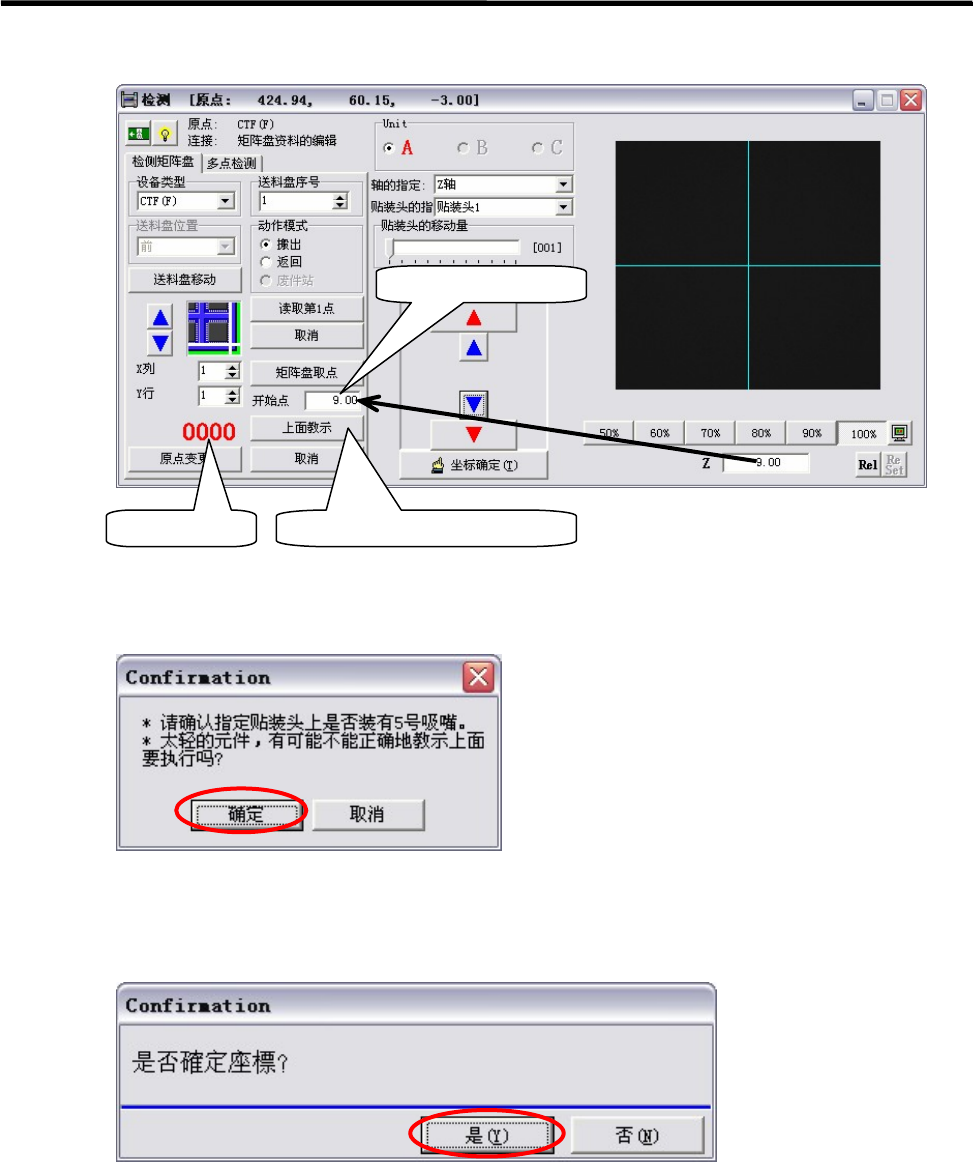
④ 在[开始点]栏中,按键输入此时接近状态的 Z 座标值。
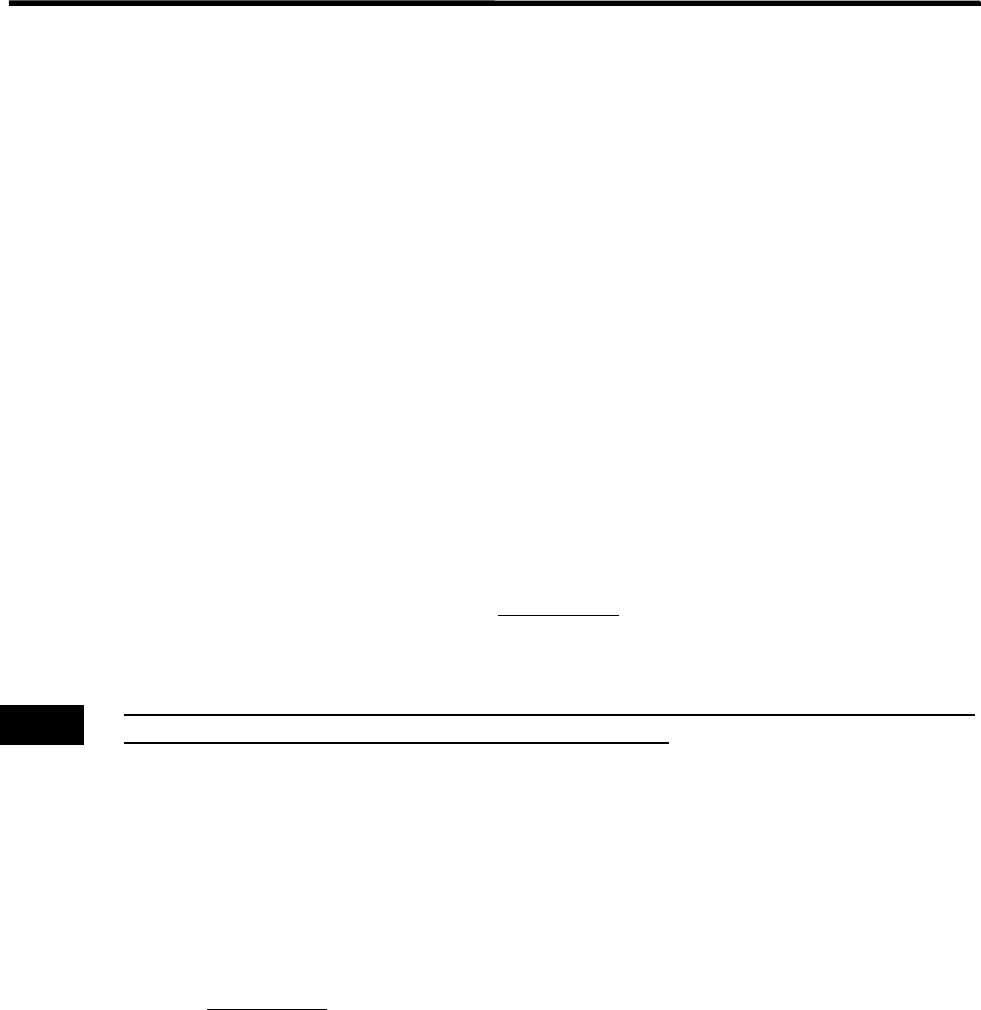
⑤
点击<上面教示>按钮。将会出现下列确认画面,点击<确定>按钮。就会从按键输入的[开始
点]的高度开始,对元件上面进行搜索。吸嘴则在吸引的同时,开始缓慢下降。
⑥
如果吸嘴接触到元件上面,真空压力上升,吸嘴的下降将会停止,出现下列的确认画面。如
果点击<是>按钮,就会将此时的 Z 坐标值作为[元件上面高度]加以确定并登录。而且,吸
嘴将会自动上升。
【注释】 如果开始实施<上面教示>的操作,吸嘴首先会移动到[X 列][Y 行]栏中指定的吸取点,并下
降到[开始点]之后,再开始实施自动检测。
请注意不要在没有元件的吸取点实施上述的<上面教示>操作。否则,吸嘴可能会顶入到矩阵盘的
底部,造成吸嘴及贴装头的破损。因此,请务必在有元件的吸取点进行该操作。
【注释】 请注意不要在[开始点]栏内输入过低的 Z 坐标值。如果[开始点]过低时,吸嘴可能会突然顶
入到元件上面,造成吸嘴及贴装头的破损。
[真空压]显示
按键输入[开始点]
点击<上面教示>按钮
5.资料库的制作与编辑
5-97
【注释】 [开始点]的初始值为 20mm。如果从该 20mm 的高度开始实施<上面教示>操作,则需要花费 10
分钟以上的时间。推荐按照【操作】的步骤,预先将吸嘴靠近到元件上面之后,再开始实施<上
面教示>的操作。
【注释】 如果吸嘴靠近,较轻的元件会从矩阵盘中被吸引上来,因此,可能会出现无法正确测量,造成[元
件上面高度]变高的情况。
【注释】 无论采用哪一种方法,[元件上面高度]的检测输入,都可能会有与吸嘴冲突的危险。因此,建
议使用游标卡尺等仪器对矩阵盘的高度进行实际测量,然后再进行按键输入。
■ 矩阵盘资料库的输入方法(2)
在送料盘上,如果矩阵盘没有碰到近前的定位销时
在这种情况下,需要进行基准坐标的变更。
用手动输入 X 方向的元件个数和 Y 方向的元件个数。
其他输入可以通过选择“功能>检测”,使用[检测矩阵盘]进行输入。
【操作】
事先将 X 方向元件个数和 Y 方向元件个数进行输入。此个数就是从第 1 吸取点吸取的元件到第 3
检测点装入元件的个数。
①
参照「7.矩阵盘送料器的操作」一章,对矩阵盘和送料盘进行正确的安装。
②
选择“编辑>送料盘程序编辑”,打开送料盘资料库。
③
点击对象矩阵盘的 X 偏差值或者 Y 偏差值。(事先已经输入了偏离基准点的偏差值)
④
选择“功能>检测”,打开检测窗口。
在执行矩阵盘检测时,请不要将头或者手等身体的一部分探进贴片机内,可能会受到伤害。另外
还要对贴片机周围的人员是否有受伤的危险等情况进行确认。
⑤
点击[检测矩阵盘]选项卡。在[设备类型]栏中选择适当的矩阵盘送料器。在[送料盘位
置]栏选择前/后中适当的一项。在 MXR 的情况下选择“前”,在 MX-RT1 的情况下选择“前”
或者“后”(前/后都可以选择)。
下面的操作⑦~⑨只适用于 MX-20 和 MXR。在滑动矩阵盘的情况下,请用手动对前/后进行正
确设定。
⑥
设定[送料盘序号]。
⑦
点击[动作模式]中的<送出>按钮,如果点击<送料盘移动>按钮,所指定的送料盘就会进入
到贴片机内。
⑧
点击<矩阵盘取点>按钮。贴装头相机将向对象矩阵盘的右侧近前移动。
⑨
打开矩阵盘资料库。选择对象矩阵盘的资料行,点击<原点变更>按钮。
以下部分将与矩阵盘资料库的输入方法(1)的第⑦项以后的步骤相同。
■ 矩阵盘取点的使用方法
通过矩阵盘取点可以使指定的贴装头向任意的矩阵盘元件上进行移动。
矩阵盘取点的使用必须在矩阵盘资料库中选择对象矩阵盘之后,才能起动检测窗口。其次,在正
确输入[设备类型]、[移动位置]、[送料盘序号]等数据之后,再指定[X 列号],[Y 列号],
然后点击<矩阵盘取点>按钮。
【注释】 矩阵盘的资料库,按照初始值或者实测值,通过手动也可以进行输入。
警告