天龙M10 M20_中文手册.pdf - 第364页
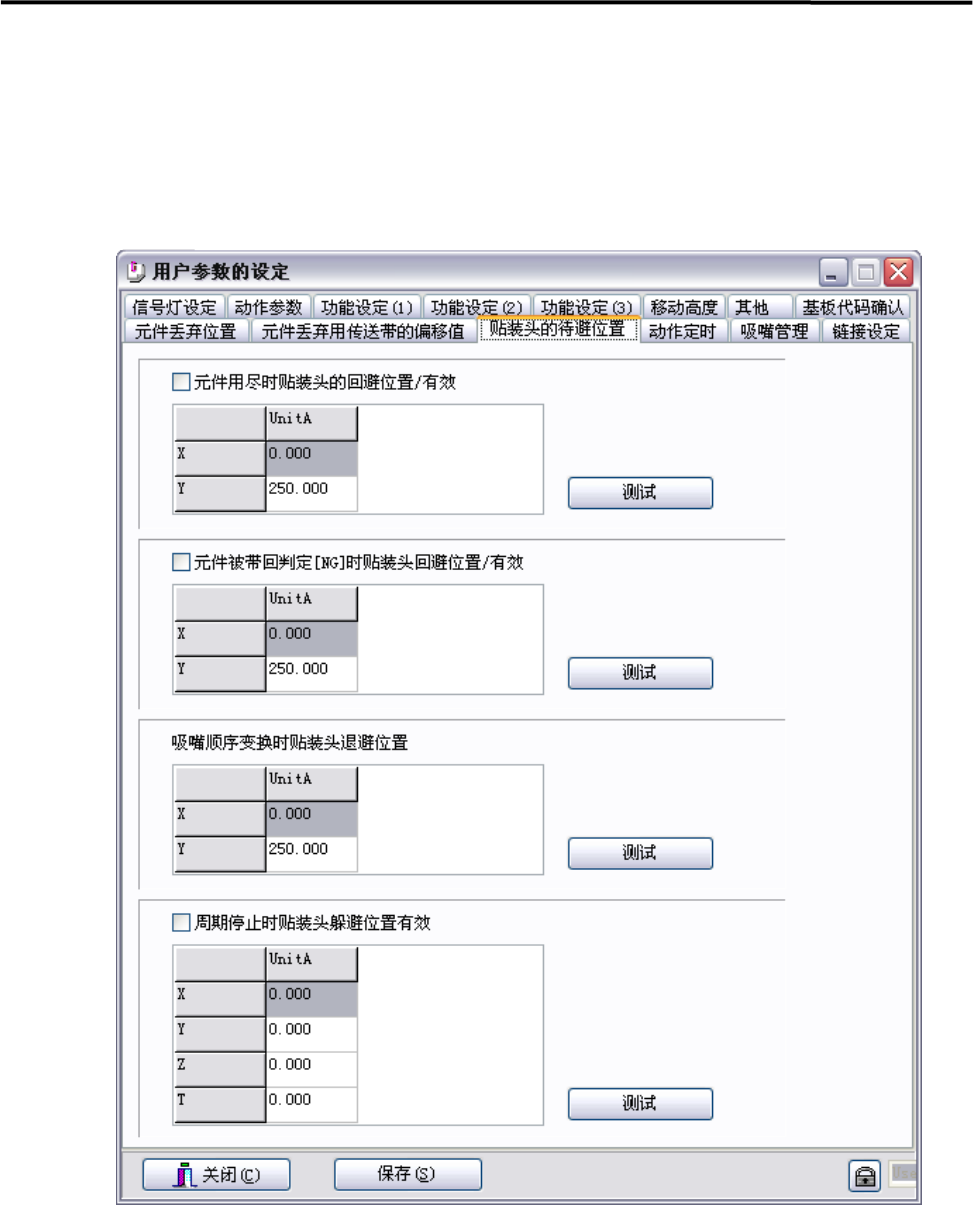
11.参数的设定 11-4 贴装头的待避位置 【菜单】 系统>用户参数的设定>贴装头的待避位置 可以对元件短缺时、元件取回判定 NG 时、更换吸嘴时或者循环停止时的贴装头退避位置坐标 进行设定。 在想要从默认位置进行变更时加以设定。 【操作】 ① 点击<测试>按钮,对 X、Y 的坐标进行输入测试。 ② 如果勾选上[元件用尽时贴装头的回避位置/有效]、[元件被带回判定 NG 时贴装头 回避位置/有效]以及[循环停止…

11.参数的设定
11-3
元件丢弃用传送带的偏移值
【菜单】 系统>用户参数的设定>元件丢弃用传送带的偏移值
对设置元件丢弃用传送带的送料器固定架、站号、偏移值等进行设定。
可以设定 10 个地点的设置场所。从1到10的数值序号与在吸取资料中将[丢弃/收回]设定为“元
件丢弃用传送带”情况下的[元件丢弃位置序号]相链接。
【注释】 关于元件丢弃用传送带的使用方法,请参照元件丢弃用传送带的用户手册。
11.参数的设定
11-4
贴装头的待避位置
【菜单】 系统>用户参数的设定>贴装头的待避位置
可以对元件短缺时、元件取回判定 NG 时、更换吸嘴时或者循环停止时的贴装头退避位置坐标
进行设定。
在想要从默认位置进行变更时加以设定。
【操作】
① 点击<测试>按钮,对 X、Y 的坐标进行输入测试。
② 如果勾选上[元件用尽时贴装头的回避位置/有效]、[元件被带回判定 NG 时贴装头
回避位置/有效]以及[循环停止时贴装头躲避位置有效],该设定就变为有效。
11.参数的设定
11-5
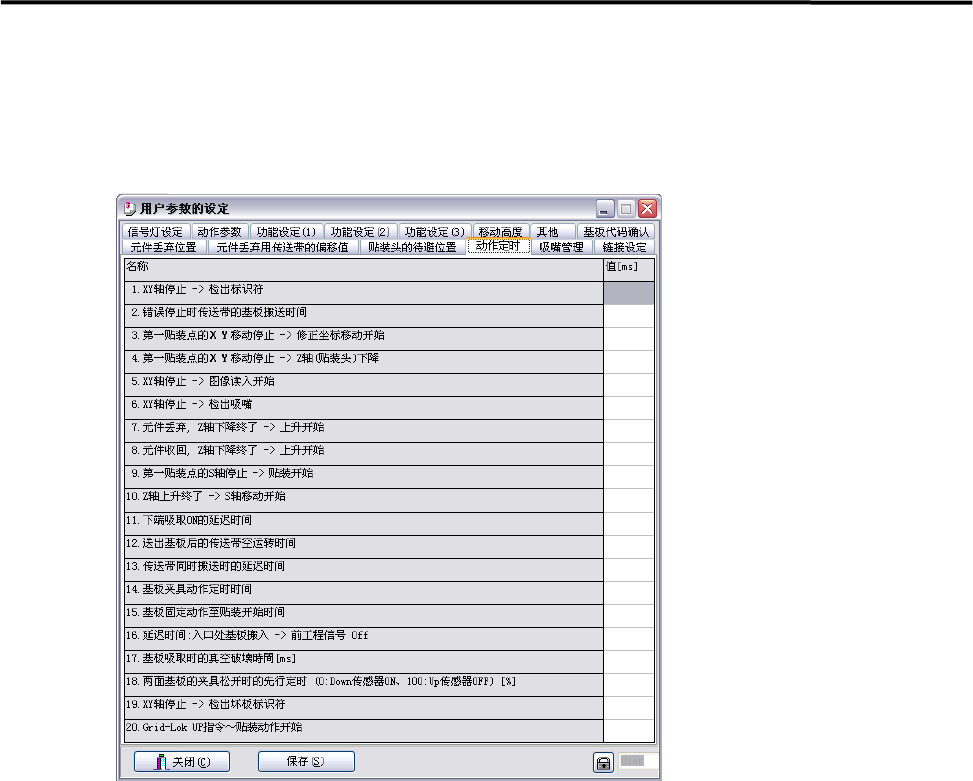
动作定时
【菜单】 系统>用户参数的设定>动作定时
可以对各动作之间的定时(时间)进行设定。在通常情况下,请使用初始设定值。
【项目】
1. XY 轴停止 -> 检出标识符
2. 错误停止时传送带的基板搬送时间
3. 第一贴装点的 XY 移动停止 -> 修正坐标移动开始
4. 第一贴装点的 XY 移动停止 -> Z 轴(贴装头)下降
5. XY 轴停止 -> 图像读入开始
6. XY 轴停止 -> 检出吸嘴
7. 元件丢弃,Z 轴下降终了 -> 上升开始
8. 元件收回,Z 轴下降终了 -> 上升开始
9. 第一贴装点的 S 轴停止 -> 贴装开始
10. Z 轴上升终了 -> S 轴移动开始
11. 下端吸取 ON 的延迟时间
12. 送出基板后的传送带空运转时间
13. 传送带同时搬送时的延迟时间
14. 基板夹具动作定时时间
15. 基板固定动作至贴装开始时间
16. 延迟时间:入口处基板搬入 -> 前工程信号 OFF
17. 基板吸取时的真空破坏时间[ms]
18. 两面基板的夹具松开时的先时定时(0:Down 传感器 ON,100:Up 传感器 OFF)[%]
19. XT 轴停止 -> 检出坏板标识符
20. Grid-Lok UP 指令~贴装动作开始
【注释】 单位:毫秒(ms)