天龙M10 M20_中文手册.pdf - 第336页
10.元件短缺和出错对应方法 10-20 基板设定 【菜单】 手动>基板设定 使传送带进行动作,对基板进行搬入或者搬出操作。 ■ 控制 ■ 基板搬出的类型 在[基板搬出的类型]栏中,如果选择“单面贴装基板”时,搬出时的 传送带将与松开基板的动 作同时进行。如果选择“两面贴装基板”时,基板将被松开,主夹具( 基板顶针)下降之后传送 带才开始动作。 在基板的背面如果已经有元件贴装的情况下,请选择“双面贴装基板” ,这样元件和下降中的基…

10.元件短缺和出错对应方法
10-19
■ 时间测定
对机构操作 ON/OFF 的时间进行测定。
【操作】
① 点击<测定开始>按钮,带有复选标记的机构操作从上部开始按顺序进行时间测定,然后显示
出测定结果。
② 点击<测定结束>按钮,测定终了。
【项目】
ON(1) 显示从 ON 命令开始到 OFF 传感器关闭为止的动作时间。
ON(2) 显示从 OFF 传感器关闭到 ON 传感器打开为止的动作时间。
Total 显示 ON(1)和 ON(2)的合计时间。
OFF(1) 显示从 OFF 命令开始到 ON 传感器关闭为止的动作时间。
OFF(2) 显示从 ON 传感器关闭到 OFF 传感器打开为止的动作时间。
Total 显示 OFF(1)和 OFF(2)的合计时间。
Max/Min 对从测定开始到测定结束为止的时间进行测定,并显示最大值和最小值。
【注释】 直到点击<测定结束>按钮为止,测定将反复进行。
■ 送料器动作
进行指定送料器的元件搬送。
【操作】
① 在[送料器固定架]栏中,选择”前”或者“后”。
② 在自旋编辑框中指定送料器的站号。
③ 点击<执行>按钮,指定的送料器将开始动作,实施 1 次元件的搬送。
10.元件短缺和出错对应方法
10-20
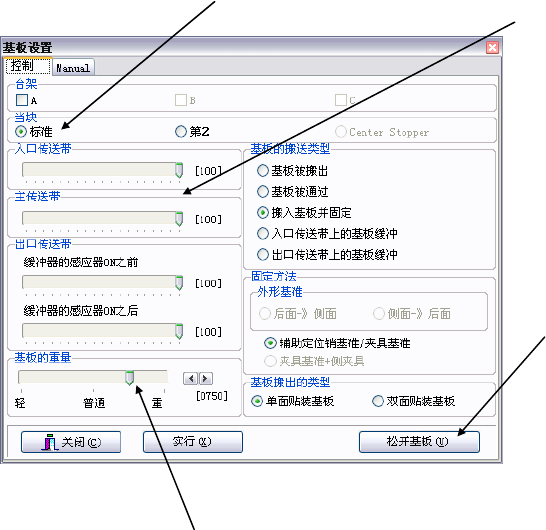
基板设定
【菜单】 手动>基板设定
使传送带进行动作,对基板进行搬入或者搬出操作。
■ 控制
■ 基板搬出的类型
在[基板搬出的类型]栏中,如果选择“单面贴装基板”时,搬出时的传送带将与松开基板的动
作同时进行。如果选择“两面贴装基板”时,基板将被松开,主夹具(基板顶针)下降之后传送
带才开始动作。
在基板的背面如果已经有元件贴装的情况下,请选择“双面贴装基板”,这样元件和下降中的基
板顶针之间就不会相互干扰。
■ 在搬入基板后并进行固定的情况下
【操作】
① 将基板放置在传送带入口侧的能够遮住入口传感器的位置。
② 选择需要使用的挡块。
③ 在[基板的搬送类型]栏中,选择<搬入基板并固定>按钮。
④ 选择[基板搬出的类型]。
⑤ 点击<实行>按钮,传送带将开始动作,基板被搬入,在生产位置上被固定住。
■ 基板搬送类型的项目
基板被搬出 将放置在生产位置的基板搬出。
基板被通过 基板在生产位置不被固定,直接通过。
搬入基板并固定 将基板搬入到生产位置,并进行固定。
入口传送带上的基板缓冲 在入口传送带上使基板呈待机状态。
出口传送带上的基板缓冲 在出口传送带上使基板呈待机状态。
在基板没有到达定位销处就停止的情况下,
通过拖动滑块进行调整。
可以调整各个传送带的速度。
按下此按钮,基板的夹具
将会松开。
选择需要使用的挡块。
10.元件短缺和出错对应方法
10-21
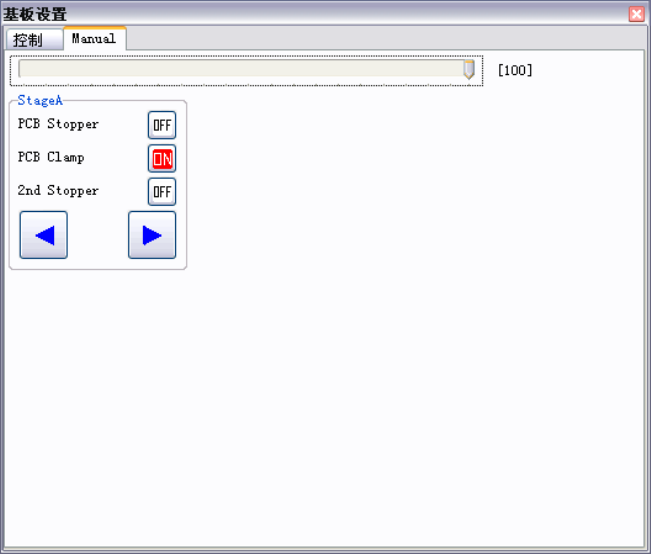
■ Manual
【操作】
① 如果点击<OFF>按钮,基板定位销、基板夹具就会变为“ON”状态。按钮也变为<ON>。
② 如果点击<ON>按钮,基板定位销、基板夹具就会返回到“OFF”状态。按钮也返回为<OFF>。
③ 如果点击方向指示按钮,搬送传送带将会回转。