天龙M10 M20_中文手册.pdf - 第370页
11.参数的设定 11-10 功能设定 【菜单】 系统>用户参数的设定>功能设定(1)(2)(3) 可以对各种机能的有效/无效进行设定。在通常情况下,请使用初始设定值。 ■ 项目 生产时的机能设定 1. 扫描相机返回中获取图像 2. 先行角度 T 功能 3. 吸嘴返回到 ANC 4. 元件被带回的图像判定 5. 元件被带回的负压判定 6. 等待基板搬出时的夹具解除 7. 自动解除元件短缺 8. 定义吸嘴资料中的负压判定 9.…

11.参数的设定
11-9
9. 元件返回时的 Z 轴速 [0.1%]
10. 元件短缺判定剩余数(-1=剩余数 0 时元件用完)
11. 吸取偏移量容许值 [mm]
12. 送料器支援功能(定期补正间隔)[sec]
13. 送料器支援功能(初次补正率)[%]
14. 贴装时载荷控制的移动距离[mm]
15. 吸取时载荷控制的移动距离[mm]
11.参数的设定
11-10
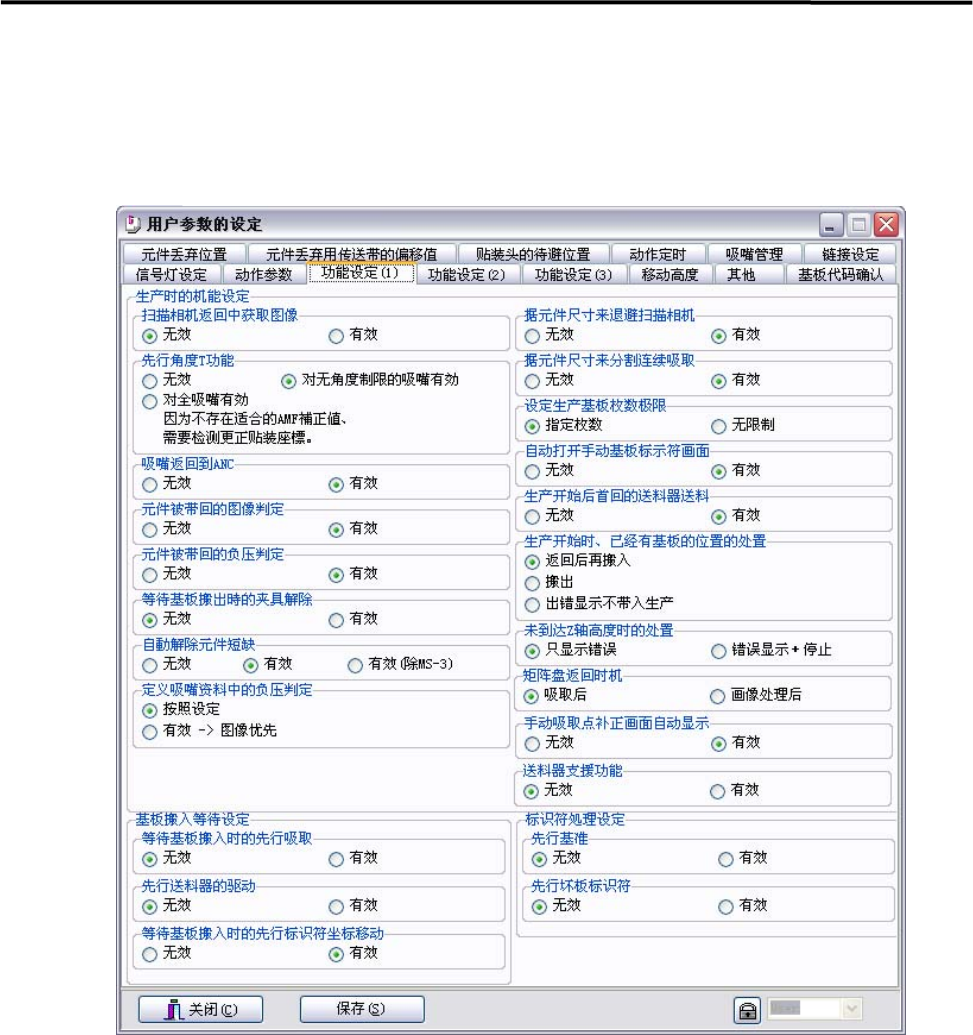
功能设定
【菜单】 系统>用户参数的设定>功能设定(1)(2)(3)
可以对各种机能的有效/无效进行设定。在通常情况下,请使用初始设定值。
■ 项目
生产时的机能设定
1. 扫描相机返回中获取图像
2. 先行角度 T 功能
3. 吸嘴返回到 ANC
4. 元件被带回的图像判定
5. 元件被带回的负压判定
6. 等待基板搬出时的夹具解除
7. 自动解除元件短缺
8. 定义吸嘴资料中的负压判定
9. 根据元件尺寸来退避扫描相机
10. 根据元件尺寸来分割连续吸取
11. 设定生产基板枚数极限
12. 自动打开手动基准标识符画面
11.参数的设定
11-11
13. 生产开始后首回的送料器送料
14. 生产开始时已经有基板时的处置
15. 未到达 Z 轴高度时的处置
16. 矩阵盘返回时机
17. 手动吸取点补正画面自动显示
18. 送料器支援功能
基板搬入等待设定
19 等待基板搬入时的先行吸取
20 先行送料器的驱动
21 等待基板搬入时的先行标识符坐标移动
标识符处理设定
22 先行基准
23 先行坏板标识符
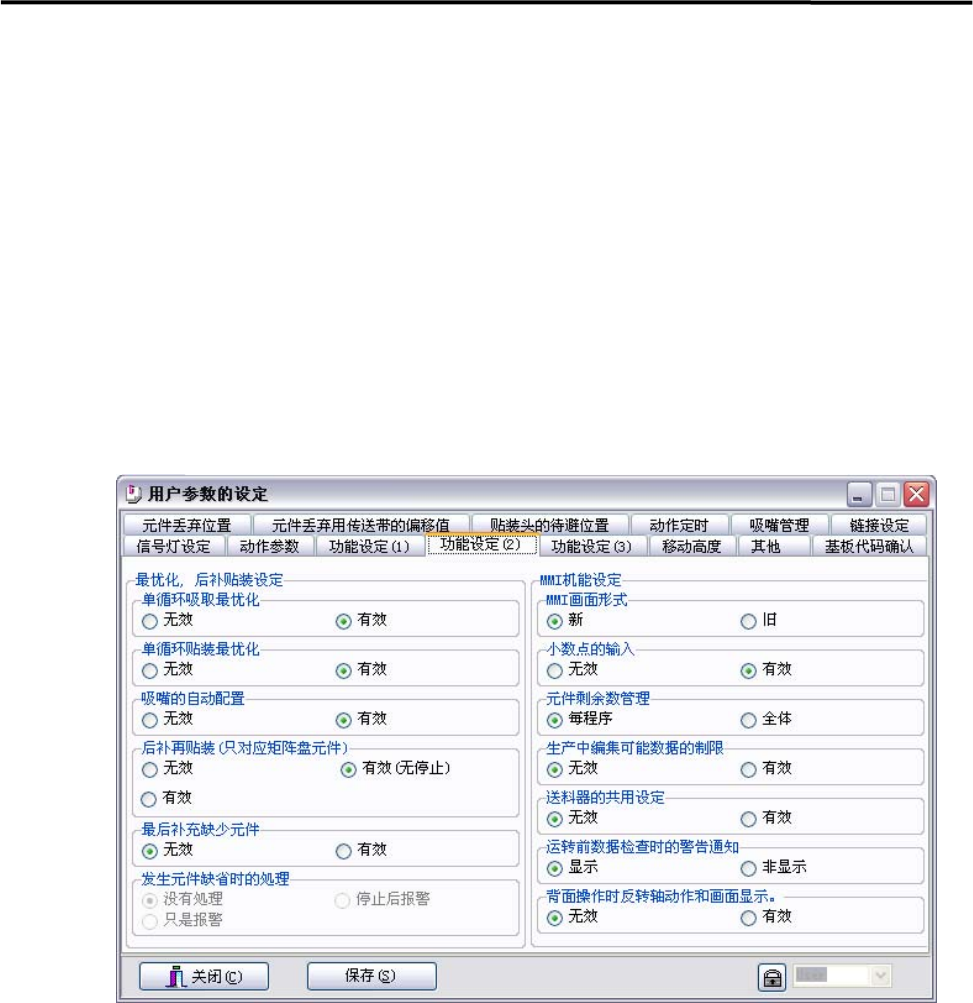
最优化、后补贴装设定
24. 单循环吸取最优化(通常设定为有效。)
25. 单循环贴装最优化(通常设定为有效。)
26. 吸嘴的自动配置
27. 后补再贴装(只对应矩阵盘元件)
28. 最后补充缺少元件
29. 发生元件缺省时的处理
MMI 机能设定
30. MMI 画面形式
31. 小数点的输入
32. 元件剩余数管理
33. 生产中编辑可能数据的限制
34. 送料器的共用设定
35. 运转前数据检查时的警告通知
36. 背面操作时反转轴动作和画面显示