3OM-1075-002.pdf - 第310页
"Placement reference" The placement coordinate reference is given priority for position- ing. (1) The P .C.B.’s at "Area A" (standby position) in the figure be- low are sent ahead of the P .C.B. stopp…
Outline of Positioning Operation
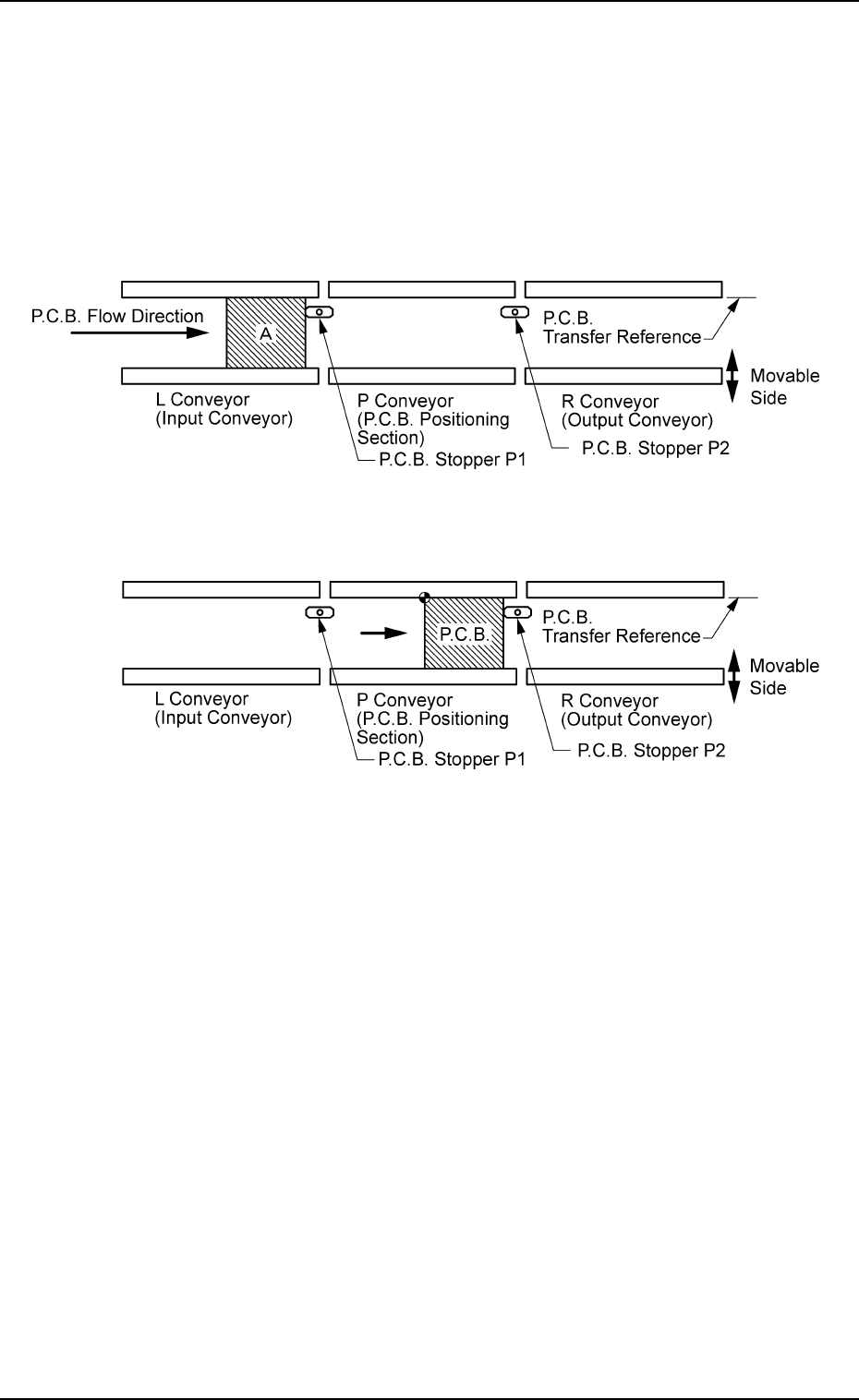
"Priority P.C.B. Flow"
P.C.B.’s are positioned based on the stopper located ahead in
the P.C.B. flow direction.
(1) The P.C.B.’s at "Area A" (standby position) in the figure be-
low are sent to the P.C.B. stoppers.
(2) The P.C.B. backup base ascends and works to position the
P.C.B. vertically.
Fig. 3E68
Fig. 3E69
0206-002 5-77 AHB01EDTP
2.2 "Auto Operation" Tab
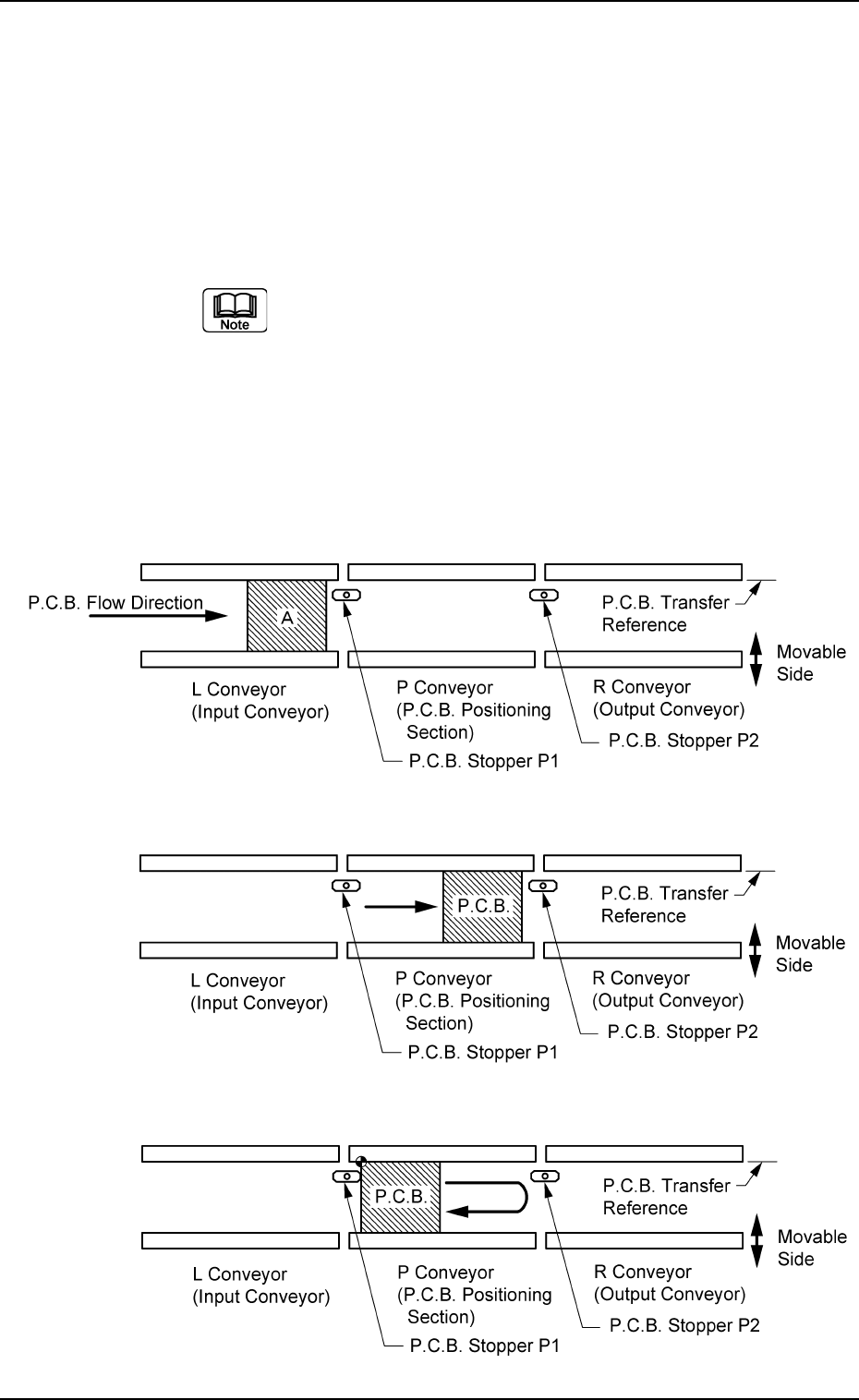
"Placement reference"
The placement coordinate reference is given priority for position-
ing.
(1) The P.C.B.’s at "Area A" (standby position) in the figure be-
low are sent ahead of the P.C.B. stoppers for positioning.
(2) An action takes place to bring the P.C.B. back to the P.C.B.
stopper.
(3) The P.C.B. backup base ascends and works to position the
P.C.B. vertically.
Because an action takes place to return the P.C.B. at
P.C.B. positioning, the P.C.B. transfer time becomes
longer, compared with the time required when "Priority
P.C.B. Flow" is set in the text box.
P.C.B. Transfer Reference : Rear Side of Machine
P.C.B. Transfer Direction : L Æ R
P.C.B. Positioning Reference : Rear Left
Placement Reference
Fig. 3E70
Placement Reference
Fig. 3E71
Placement Reference
Fig. 3E72
2.2 "Auto Operation" Tab
0206-002 5-78 AHB01EDTP
Y clamp timer [sec]
Set a period of time during which the Y pusher moves forward or
backward for P.C.B. alignment in Y direction (horizontal P.C.B. posi-
tioning). The set parameter is used commonly for both forward and
backward movements.
The Y pusher is not provided with any sensors for detection of the
forward or backward movement because the P.C.B. locating side
clamp (Y pusher) moves only a short distance. Therefore, the timing
of movement is controlled by the software-based timer.
••
••
• Default: 0.3 seconds
••
••
• Enter a period of time during which the Y alignment is made com-
pletely.
••
••
• This is used for the switchover timing (Clamp ON or OFF) of the
application (software).
••
••
• Whenever the speed of the forward or the backward movement is
adjusted, it is required to change the set parameter to avoid any
impact which may be given to a P.C.B. during Y alignment.
••
••
• Data Input Range: 0 to 99 seconds
When the parameter is too large, excessively long time will
be required for P.C.B. positioning or releasing.
Z clamp timer [sec]
Set the time of the P.C.B. clamp timer in the text box.
This is used for the switchover timing (Clamp ON or OFF) of the
application (software).
Conveyor buffer setup
Determine whether or not the P.C.B.’s should be buffered on the po-
sitioning conveyor.
Set "Enable" or "Disable" in the text box.
The set parameter becomes effective when "Priority P.C.B. Flow" is
set in the "Locate mode" text box and the P.C.B. size is less than 150
mm.
P.C.B. detection off delay time [sec]
Set the P.C.B. detection delay time for reverse positioning.
The data input range is "0 to 0.999 seconds. "
2.2 "Auto Operation" Tab
01 12-001 5-79 AHB01EDTP