3OM-1075-002.pdf - 第45页
0206-003 2-26 AHB01EDTP P .E.C. recognition head Select the heads to be used for global and image recogni- tion operations. Both Head : The P .E.C. recognition is performed with the P .E.C. recognition cameras on the hea…
P.E.C. recognition mode Local
Select one of the following options to determine whether or
not the fiducial mark on each component placement point
should be recognized.
Disable : The local recognition function is not used.
Enable : The local recognition function is used.
When "Enable" is selected, set the coordinates of
the fiducial marks in (C02_13), (C02_14), and
(C02_15).
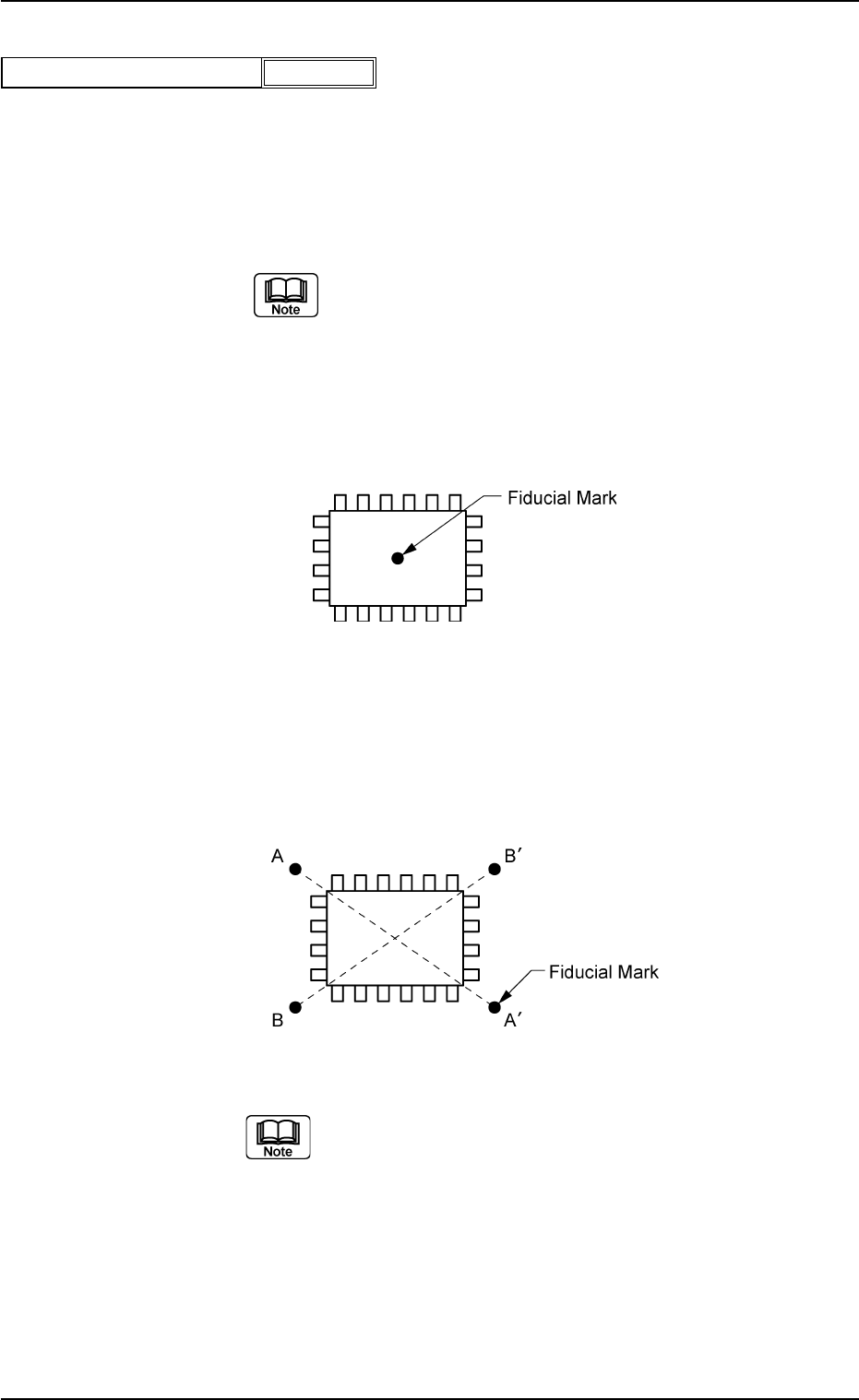
1 Point: Put a fiducial mark on the center of component
placement point or a desired point around the cen-
ter.
Fig. 3B37
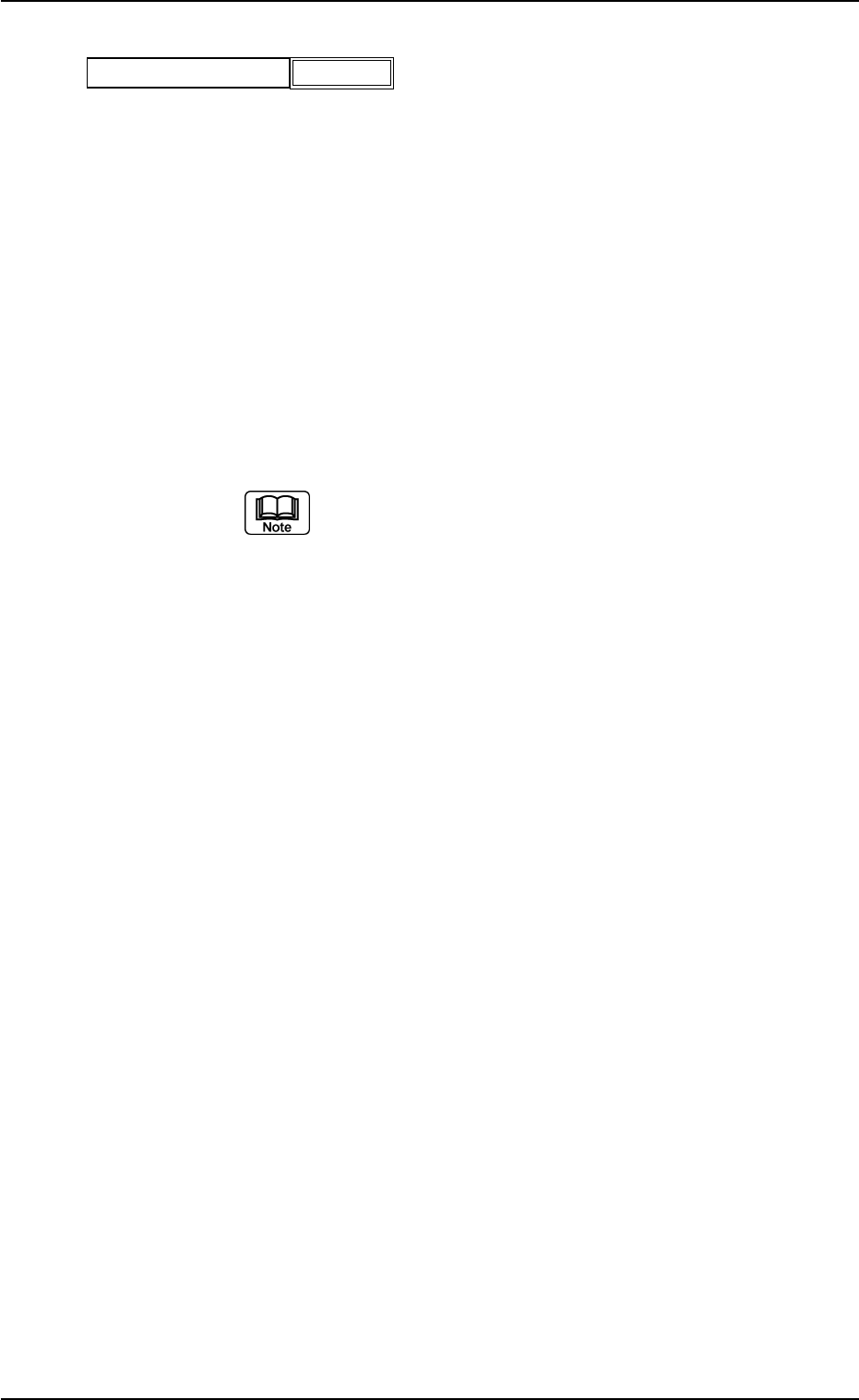
2 Point: It is recommended that two points (fiducial marks)
should be located symmetrically on both sides of
the center of the placement position.
Fig. 3B38
(a) When "Enable" is set in the text box, the devia-
tion of each component placement point can
be corrected.
(b) The coordinates and mark code of a fiducial
mark are designated in the placement data (P).
0206-003 2-25
AHB01EDTP
2.3 Operation Data
P.E.C. recognition mode Local
Fig. 3B36
Disable
0206-003 2-26 AHB01EDTP
P.E.C. recognition head
Select the heads to be used for global and image recogni-
tion operations.
Both Head : The P.E.C. recognition is performed with the
P.E.C. recognition cameras on the head #1
and #2 sides.
Head #1 : The P.E.C. recognition is performed with the
P.E.C. recognition camera on the head #1
side.
Head #2 : The P.E.C. recognition is performed with the
P.E.C. recognition camera on the head #2
side.
(a) When components are placed, using both
heads, it is advisable that "Both Head" should
be selected.
(b) When "Both Head" is set in the text box, the
following merit and demerit will be found.
Merit : The accuracy of component place-
ment will be increased.
Demerit: Compared with the recognition time
taken when only one head is used,
longer recognition time is required
because two heads are used.
(c) As for the local recognition function, the recog-
nition is made using the camera on the head
where components are placed regardless of the
parameter set in the text box.
2.3 Operation Data
P.E.C. recognition head
Fig. 3B39
Both Head
(A02_02) P.E.C. recognition mode Global
When "1 Point", "2 Point", "3 Point", or "4 Point" is selected
for the global P.E.C. recognition function, the coordinates
and mark code of each fiducial mark must be entered in the
corresponding text boxes.
Fiducial mark #1 X location [mm], Y location [mm]
Set the coordinates of the first fiducial mark in the text boxes.
Unit: mm
Fiducial mark #1 Mark code
Set the mark code of the first fiducial mark in the text box.
Fiducial mark #2 X location [mm], Y location [mm]
Set the coordinates of the second fiducial mark in the text
boxes.
Unit: mm
Fiducial mark #2 Mark code
Set the mark code of the second fiducial mark in the text
box.
Fiducial mark #3 X location [mm], Y location [mm]
Set the coordinates of the third fiducial mark in the text boxes.
Unit: mm
Fiducial mark #3 Mark code
Set the mark code of the third fiducial mark in the text box.
0206-003 2-27
AHB01EDTP
2.3 Operation Data
125.000 [mm]
125.000 [mm]
Fiducial mark #1 X location [mm]
Y location [mm]
Fig. 3B40
95.000 [mm]
95.000 [mm]
Fiducial mark #2 X location [mm]
Y location [mm]
Fig. 3B42
1
Fiducial mark #1 Mark code
Fig. 3B41
1
Fiducial mark #2 Mark code
Fig. 3B43
Fiducial mark #3 X location [mm]
Y location [mm]
0.000 [mm]
0.000 [mm]
Fig. 3B44
1
Fiducial mark #3 Mark code
Fig. 3B45