3OM-1075-002.pdf - 第82页
• • • • • P .E.C. Recognition Data Set "Disable" in the "P .E.C. recognition function" text box. Do not set any other parameters. • • • • • P .E.C. Recognition Mark Data Do not create this data. • • •…
••
••
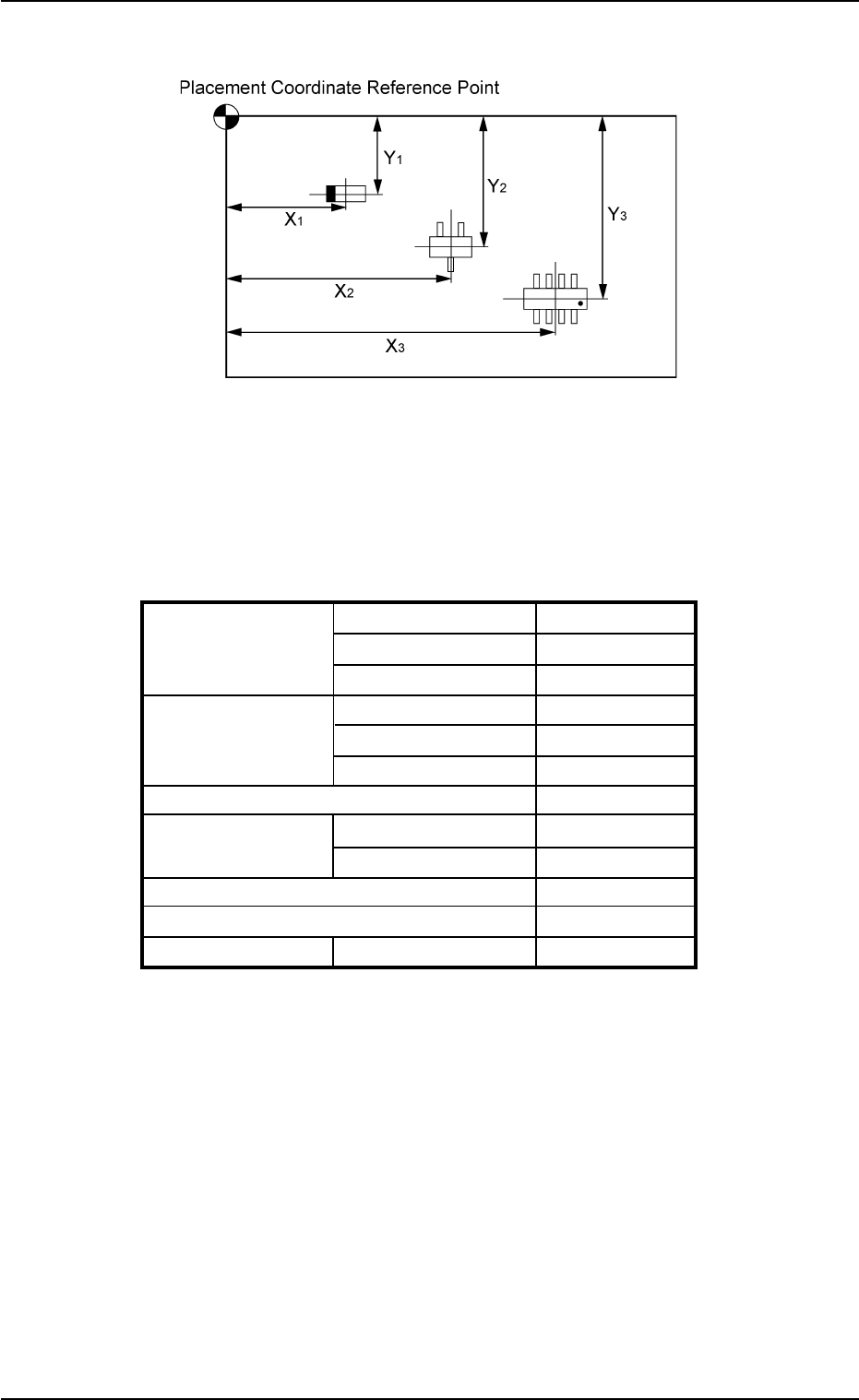
• Placement Coordinates and Angles (Z=Theta)
Fig. 3B128
(2) Creation of Operation Data
••
••
• P.C.B. Data
Table 3B18
P.C.B. size
X [mm] (Horizontal) 335.00 [mm]
Y [mm] (Vertical) 255.00 [mm]
T (Thickness) 1.6 [mm]
P.C.B. origin offset
X [mm] (Horizontal) +00.000[mm]
Y [mm] (Vertical) +00.000[mm]
Z=theta (Angle) +00°000’
P.C.B. height offset +00.000[mm]
Pre-Placed P.C.B. top 0.00 [mm]
cmpnt thickness P.C.B. bottom 0.00 [mm]
Placement mode Placement
P.C.B. positioning reference Rear Left
P.C.B. locate Datum Outline
3.1 Single Pattern
0206-003 2-62 AHB01EDTP
••
••
• P.E.C. Recognition Data
Set "Disable" in the "P.E.C. recognition function" text box.
Do not set any other parameters.
••
••
• P.E.C. Recognition Mark Data
Do not create this data.
••
••
• Setup Data
Create this data when the automatic setup function should be used.
(3) Creation of Placement Feeder Location Data
Tabl 3B19
Fdr.No. Component ID C Comment
Dual Feeder Feeder Alternate
Fdr. No. Fixed Alternate Fdr. No.
101 TANA3216B0--- - - Disable Disable 000
103 TR2012-3B0SANL2 - - Disable Disable 000
105 S0P008-B02SAN E Disable Disable 000
(4) Creation of Placement Data (P-data) U01
••
••
• Unit Control
Tabl 3B20
Unit Control Offset X [mm] Offset Y [mm] Offset Z Offset H
Placement +00.00 +00.00 +00°00’ +0.00
••
••
• Unit P.C.B. B.B.R.
Set "Disable" in the "P.E.C. recognition mode Image" text box.
Do not set any other parameters.
••
••
• Placement Data (P-data)
Tabl 3B21
P-No. X [mm] Y [mm] Z H [mm] Fdr. No. C S HD PU
Comment V
1X
1
Y
1
000°00’ +0.00 101 - - 2 0 00
2X
2
Y
2
090°00’ +0.00 115 - - 1 0 00
3X
3
Y
3
180°00’ +0.00 105 - - 2 0 00
4 000.00 000.00 000°00’ +0.00 000 E - 0 0 00
(5) Creation of Placement Data (O-data) U01
Do not create this data.
3.1 Single Pattern
0206-002 2-63 AHB01EDTP
3.2 Single Pattern (P.E.C. Recognition Function En-
abled)
(1) Information on Pattern Program Creation
••
••
• P.C.B. Size
Follow the same procedure as described in "3.1 Single Pattern".
••
••
• Packaged Posture and IDs of Components
Follow the same procedure as described in "3.1 Single Pattern".
••
••
• Fiducial Mark
Fig. 3B129
••
••
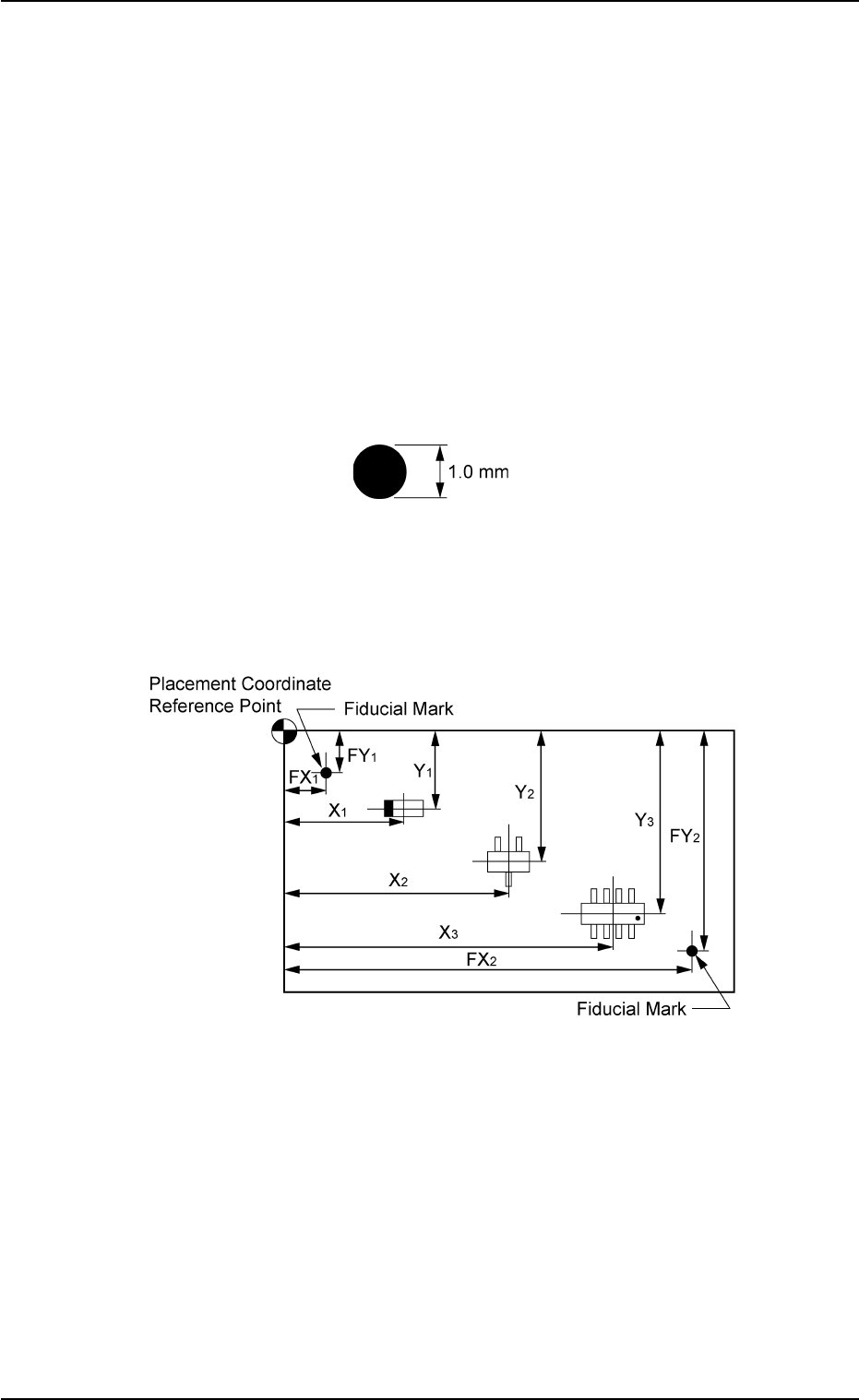
• Placement Coordinates & Angles and Coordinates of Fiducial
Marks
Fig. 3B130
3.2 Single Pattern (P.E.C. Recognition Function Enabled)
0206-002 2-64 AHB01EDTP