operation-cp45.pdf - 第39页
Features and Scope of Equipment 1-1 Chapter 1. Features and Scope of Equipment 1.1 Features of Equipment The CP series CP-45F/V and CP-45FS of Samsung Techwin Co.,Ltd. are m ulti-purpose, high-precision component placers…
Features and Scope of Equipment
1-1
Chapter 1. Features and Scope of
Equipment
1.1 Features of Equipment
The CP series CP-45F/V and CP-45FS of Samsung Techwin Co.,Ltd. are multi-purpose,
high-precision component placers that adopt non-contact-type centering using full vision
recognition system.
1.1.1. Features of CP-45F/V AND CP-45FS model
Maximum of 104 feeders can be installed. (With 8-mm tape feeder, 52 feeders each
can be installed at the front and rear sides).
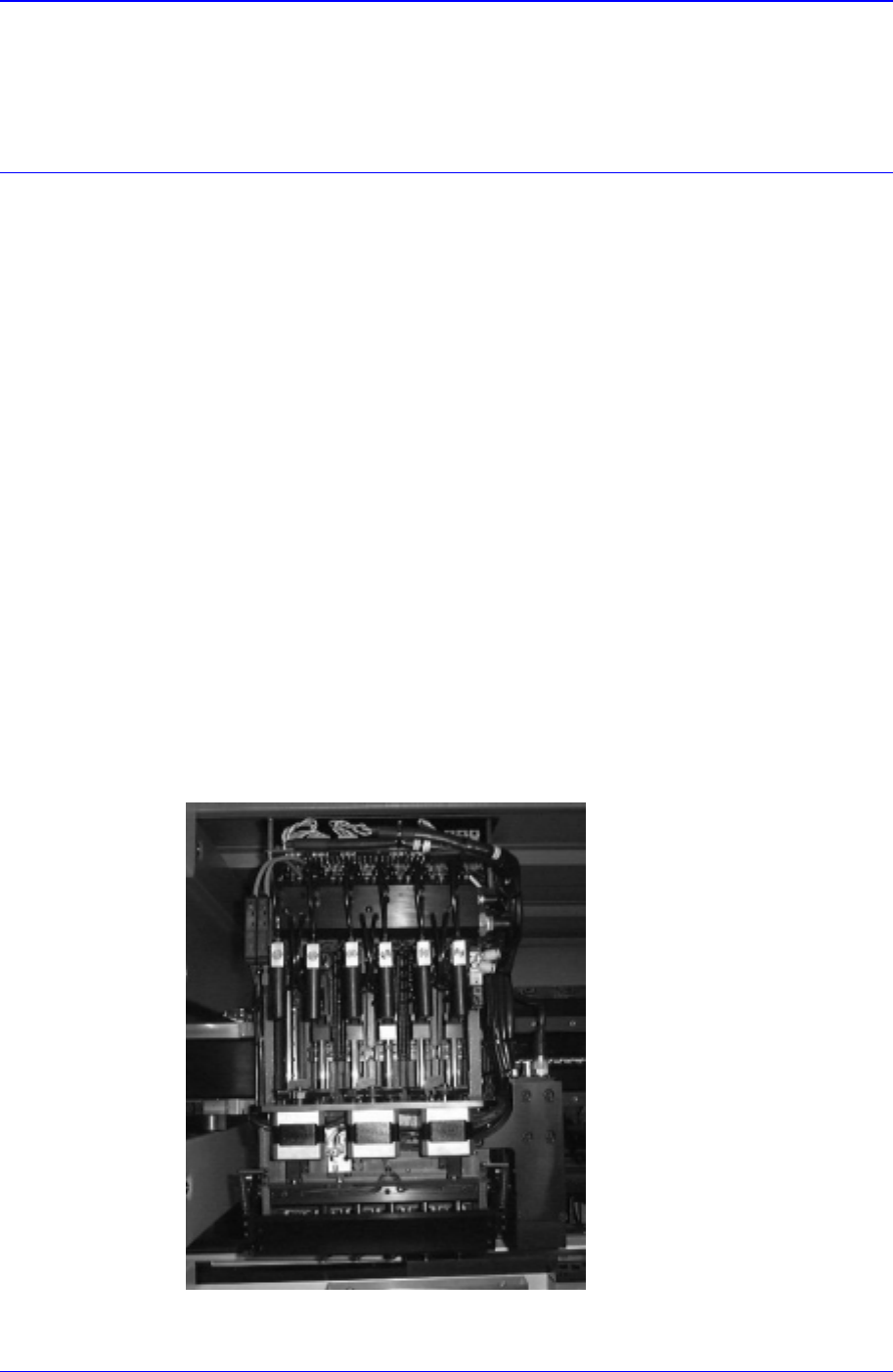
The head assembly is manufactured in one module; this module is composed of six
spindle units.
Each spindle has its own flying vision camera, and adopts non-contact-type
centering
so that stable operation can be performed. All spindles are arranged at
regular intervals of 30.00 mm for simultaneous pickups from the tape feeder.
CP-45FS has six 15mm flying vision cameras for placing the components
requiring precision (0603 Chip, □ 12mm.)
Figure 1-1. Head Assembly of CP-45F/V Model
Samsung Component Placer CP-45F(V)/FS Operations Manual
1-2
The head assembly contains Z-axis and θ-axis for from micro chips to large fine-
pitch components.
Designed for high stiffness, the spindle module has a part size capability that
enables faster motion time (Z-axis motion time - 9G).
Z-axis motion is driven by a AC servomotor through high-precision Timing Belt.
The moving mass of this mechanism is balanced by the constant force spring.
θ
-axis motion is carried out by high precision, zero backlash ball bearing spline
assembly and a micro-step motor.
The high-precision micro step motor controls two axes simultaneously by connecting
two ball bearing spline nut housings with the timing belt.
The X-Y axis driving gear is each driven by AC servomotor, thus securing the
precision required for high-precision feed.
A move camera enables high-speed fiducial mark recognition for high-speed
placement (the placement of components on a PCB) performance.
The software (Man-Machine Interface, MMI), based on Microsoft Window 98 has
improved the ease of use. For operating equipment, and for creating and modifying
the production program, multi-window system software is used.
Maintenance and service capabilities have been improved by enhanced a self-
diagnostic function and a self-calibration function that activates when errors occur.
To place QFP component with 0.5mm lead pitch, a fixed vision recognition camera is
ed as a basic feature.
Warning
As the descending speed of Z axis of head is 9G, inserting
a hand under the head while the machine is in operation
could result in injury.
Do not insert a hand under the head while the machine is
in operation.
Warning
When Windows is shut forcibly due to internal error, the
machine might be still in operation.
In that case, if the program is restarted, the machine might
run out of control. Turn the power switch off and restart
the system..