operation-cp45.pdf - 第58页
Samsung Component Placer CP-45F(V)/FS Operations Manual 2-6 2.5. X-Y Frame Part Figur e 2-6. X-Y Frame Part 2.5.1. XY-Axis Specifications T able 2-1. XY-Axis sp ecification Classification Specifications Remarks Mechanism…
Basic Configuration and Name of Each Part
2-5
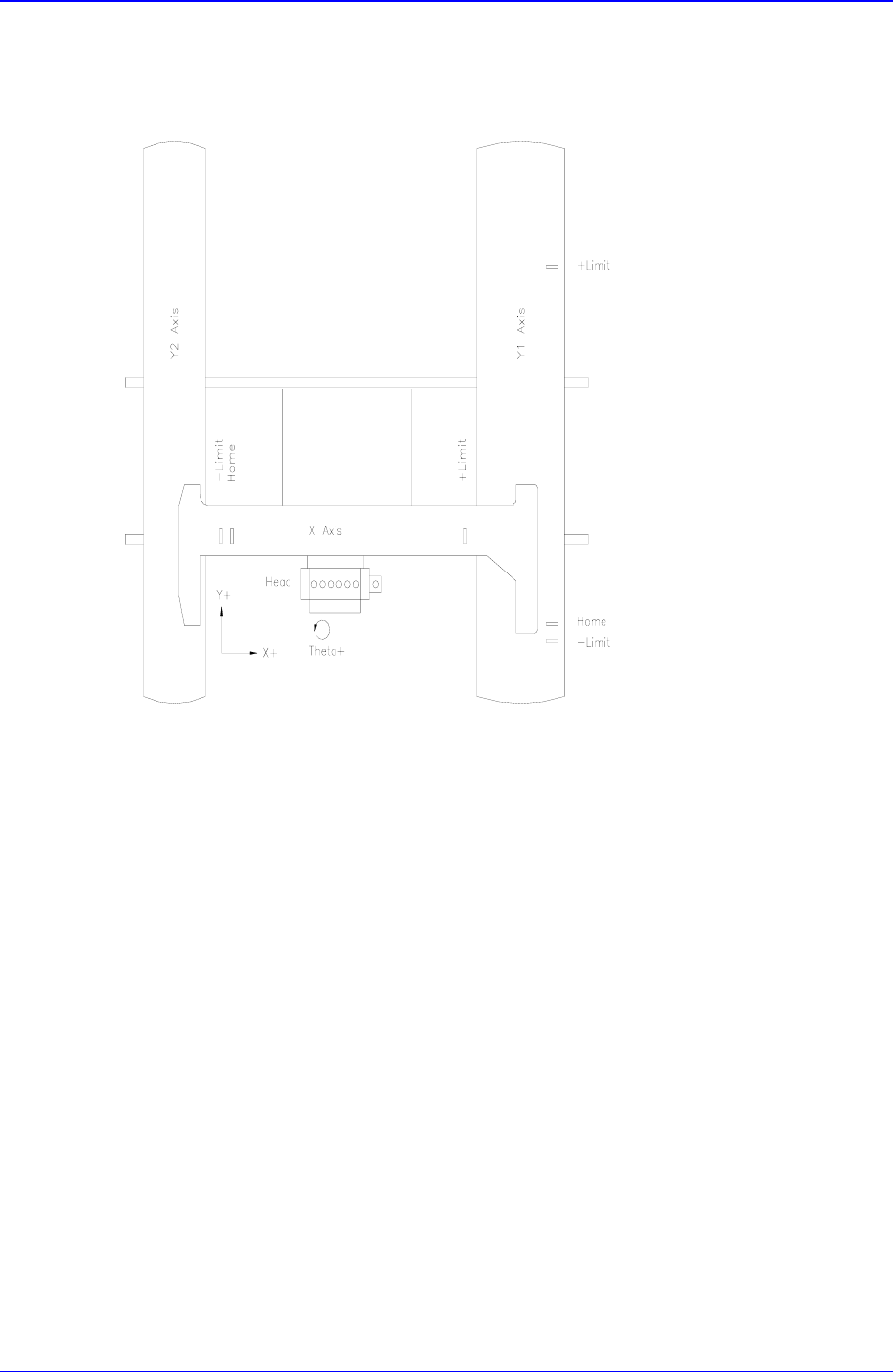
2.4. Coordinate System
The basic coordinate system is shown in “ Figure 2-5”.
Figure 2-5. Coordinate System of Equipment
2.4.1. X, Y-axis
Used to indicate the positions of the head, ANC, place position, and board fiducial mark.
2.4.2. Z-axis
Z-axis indicates the position of a nozzle in the head. The upper side of the fixed board is
set '0'.
2.4.3. Theta (R)-Axis
Indicates the angle for centering a component by the head. The counterclockwise rotation
is indicated as +, while clockwise rotation is indicated as -.
Samsung Component Placer CP-45F(V)/FS Operations Manual
2-6
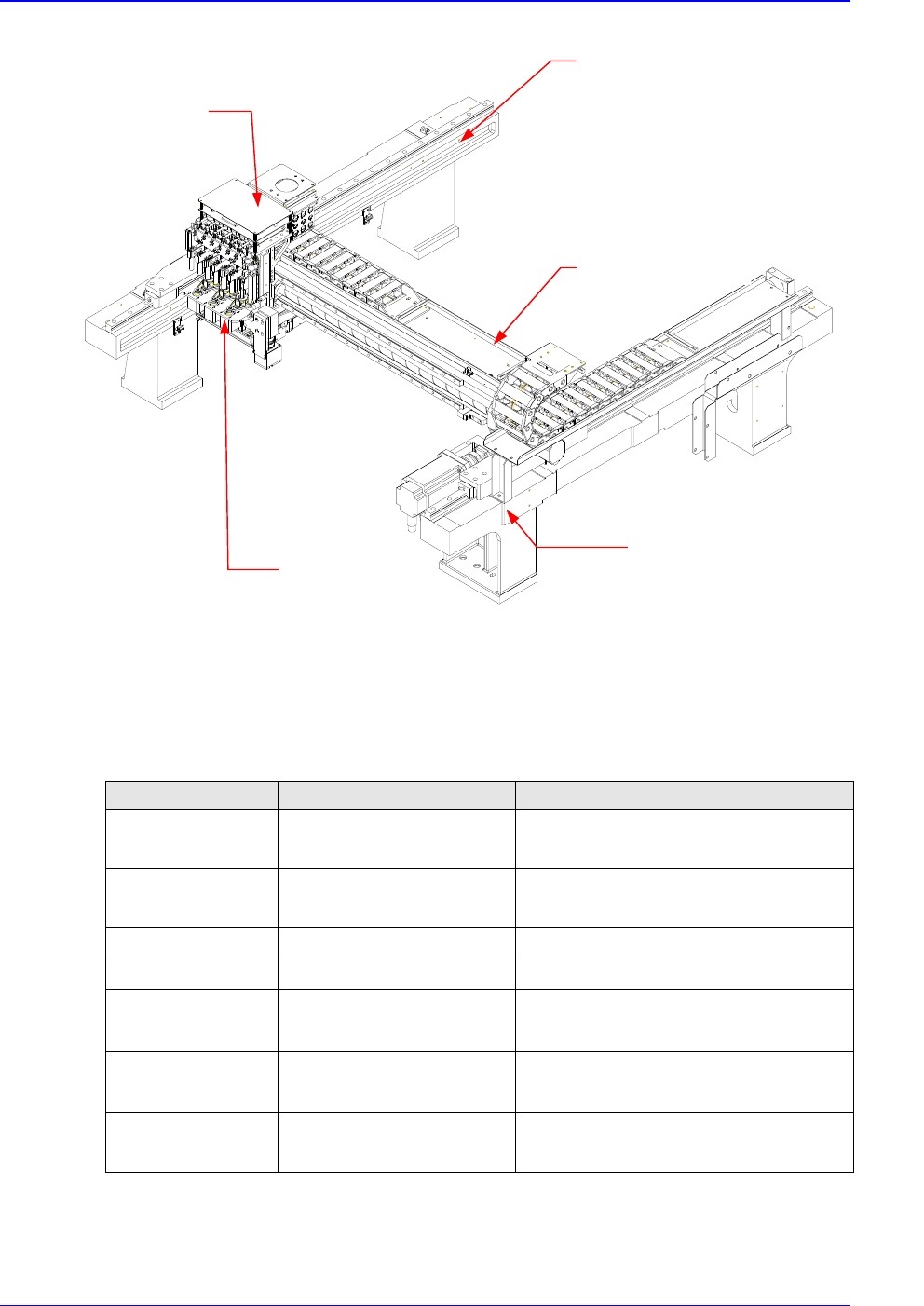
2.5. X-Y Frame Part
Figure 2-6. X-Y Frame Part
2.5.1. XY-Axis Specifications
Table 2-1. XY-Axis specification
Classification Specifications Remarks
Mechanism
X-axis: AC Servo motor
Y-axis: AC Servo motor
400 W
1500 W
Decelerating ratio
X-axis 1:1
Y-axis 1:1
Repeatability
± 0.02 mm
Resolution
5 µm/pulse
X-Axis range
692 mm
682 mm
(+) stopper ↔ (-)stopper
(+) over run sensor ↔ (-)over run sensor
Y-Axis range
916 mm
906 mm
(+) stopper ↔ (-)stopper
(+) over run sensor ↔ (-)over run sensor
The type of
controlling speed
“S” accelerating/
decelerating control
Head Assembly
X Frame
Head I/F Board Cove
r
Y2 Frame
Y1 Frame
Basic Configuration and Name of Each Part
2-7
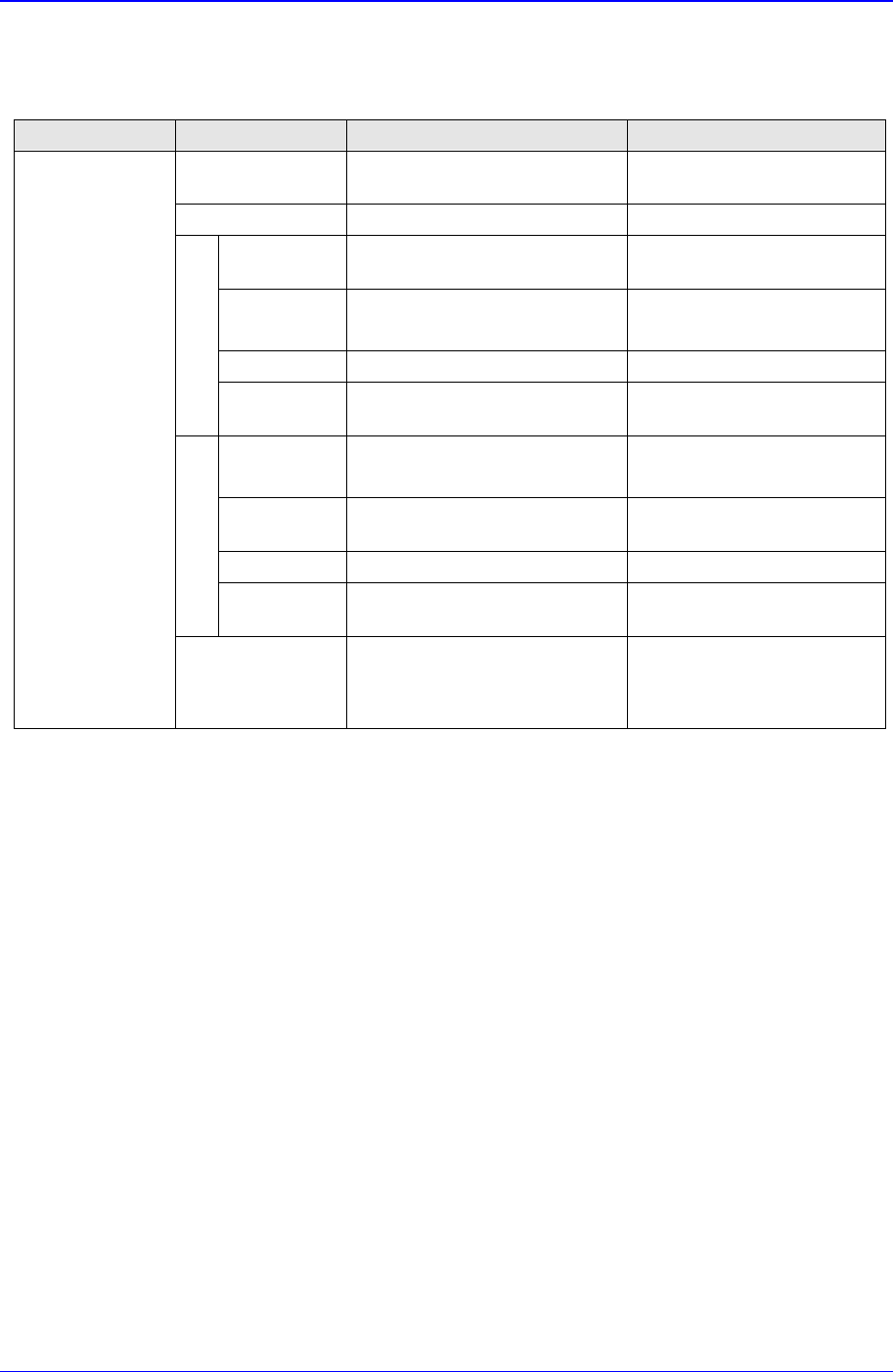
2.5.2. Head Specifications
Table 2-2. Head specification
Classification Item Specifications Remarks
The number of
nozzle
6 Nozzle
Head pitch 30 mm
Mechanism
AC Servo motor + Belt & LM
+ Compliance Ass'y
Digital control illumination
Movement
range
89.0 mm
85.5 mm
Stopper to stopper
Soft limit sensor
Resolution 0.01 mm/pulse Based on teaching
Z-axis
Repeatability
± 0.02 mm
Under the optimum
conditions
Mechanism
Micro stepping motor +
Belt & Pair
head 1/2, 3/4, 5/6 Pair
Movement
range
Unlimited°
Resolution 0.01 °/pulse Based on teaching
θ -axis
Repeatability
± 0.03 °
Under the optimum
conditions
Head
Recognizant
method
Flying Vision Camera
Upward Vision Camera
ing digital illumination device
2.6. PCB Conveyor System
2.6.1. Configuration
In the PCB conveyor system, boards from the previous process are transferred, the
placement position is determined, and boards are fixed. This system is divided into three
stages, thus reducing the PCB swap time to the minimum. The flatness of PCB is
improved by affixing the bottom surface of PCB. A wide range of PCB sizes from small-
sized PCB's (30.0mm × 50.00mm) to large-sized PCB's (460.0mm × 400.0mm) can be
accommodated.
The PCB conveyor system configuration is shown below: