N7201A616J00.pdf - 第364页
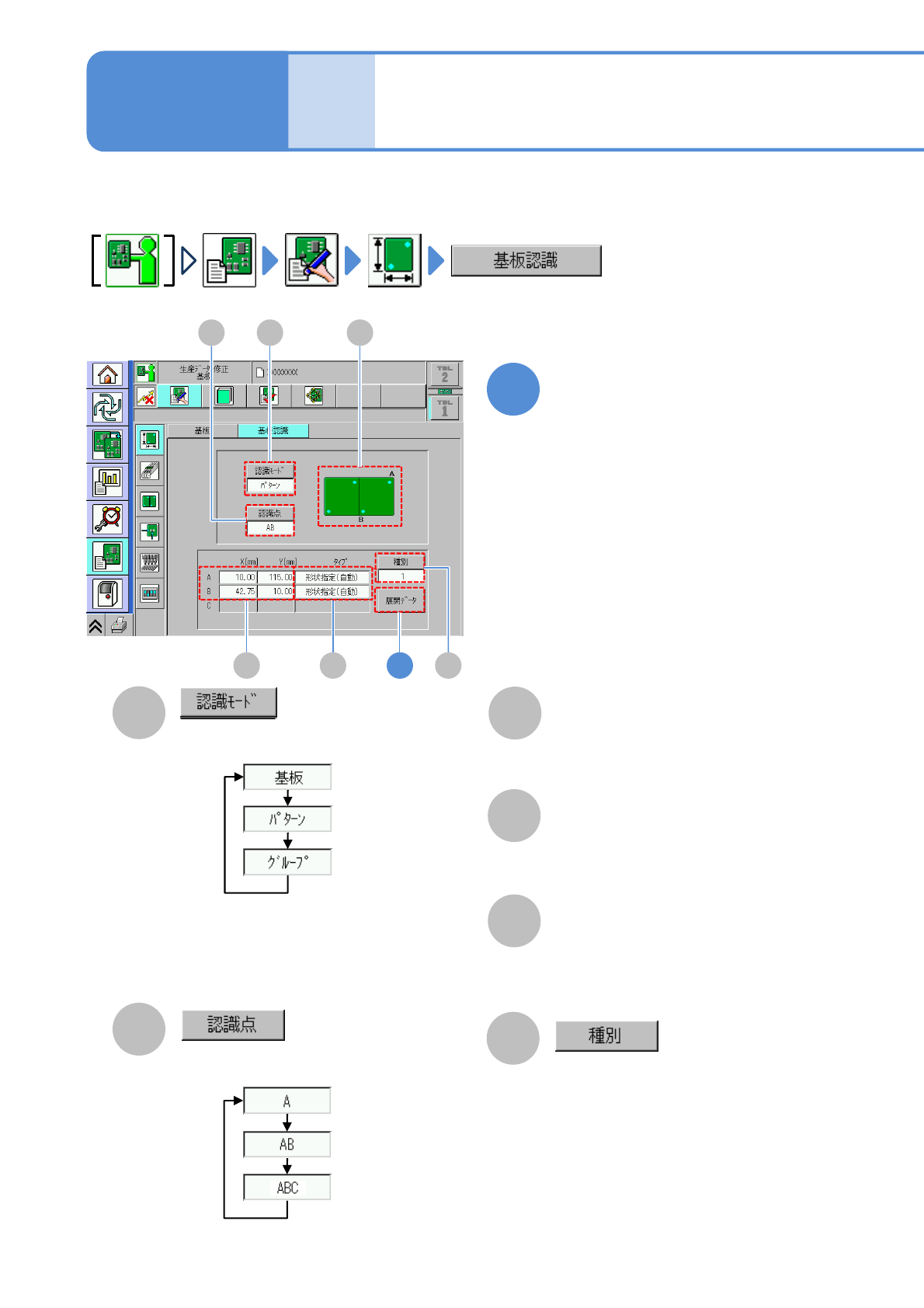
NPM-W 2 EJM7DJ-MB-06O-00 データ 修正 6-1-3 -1 D A B E 認識マークを選ぶ。 X[mm] 、 Y[mm ] D E A B [認識モード]で「パターン」または「グ ループ」を選んだ場合で種類が複数ある とき、パターン番号またはグループ番号 を選ぶ。 F 1 画面上の必要な箇所のデータを修 正する 認識モードを選ぶ。 ●基板: 基板認識マークを認識する。 ●パターン: パターン認識マークを 認識する…
NPM-W2 EJM7DJ-MB-06O-00
J
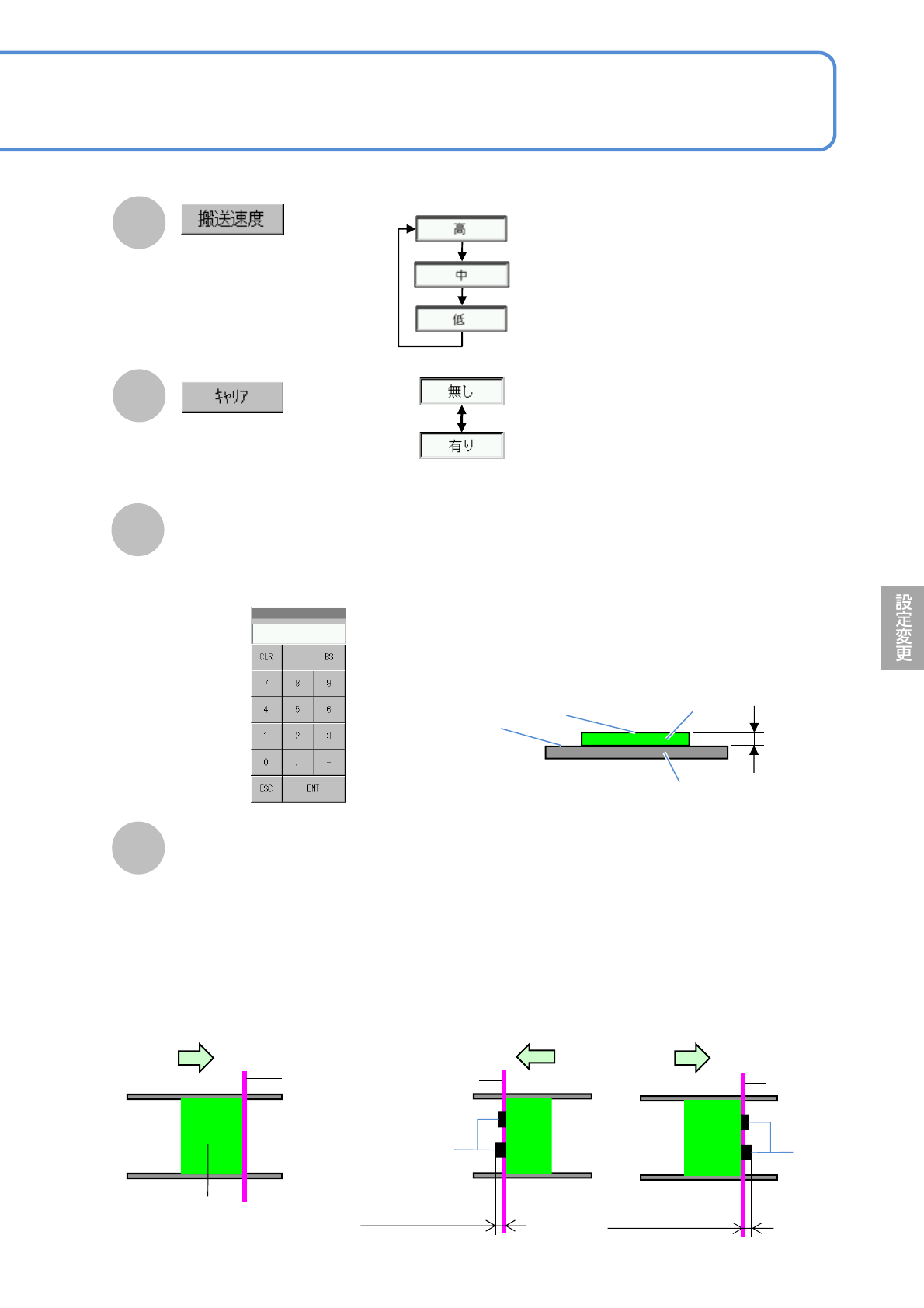
装着済はみだし長さ(左、右)
●装着された部品が基板からはみ出していると、その部品の端が基板の端であると判断され、
基板認識エラーになる。
部品がはみ出した最大長さを入力することで、正しい位置決めができる。
■通常の基板位置決め
■装着済み部品がはみ出しているとき
基板
基準
装着部品
基準
●装着された部品が基板の左右からはみ出している部分の最大長さを入力する。
入力範囲:0 ~ 9 mm
6-1-2-2
装着済
はみだし長さ(左)
基板流れ方向
装着
部品
基準
装着済
はみだし長さ(右)
基板流れ方向 基板流れ方向
キャリア基板の有無を選ぶ。
G
基板の搬送速度を選択ぶ。
H
I
高さ
数字の画面に触れると入力画面(下図)
が表示される。
■“有り”のとき
●キャリア基板を使用した場合の装着面と、キャリ
ア基板のクランプ面との高さの差を入力する。装
着面がクランプ面より高い場合はプラスの値、低
い場合はマイナスの値を入力する。
装着面
クランプ面
基板
キャリア基板
高さ
●高さ入力(プラスの値の場合)
NPM-W2 EJM7DJ-MB-06O-00
データ
修正
6-1-3-1
D
A
B
E
認識マークを選ぶ。
X[mm]、Y[mm]
D E
AB
[認識モード]で「パターン」または「グ
ループ」を選んだ場合で種類が複数ある
とき、パターン番号またはグループ番号
を選ぶ。
F
1
画面上の必要な箇所のデータを修
正する
認識モードを選ぶ。
●基板: 基板認識マークを認識する。
●パターン: パターン認識マークを認識する。
●グループ: グループ認識マークを認識する。
基板認識データの修正 1
DGSで登録した基板認識データを修正する方法を説明します。
それぞれの認識マークの基板認識座標
(X,Y) を入力する。
●画面に触れると、入力画面が表示される。
F
タイプ
それぞれの認識マークの認識方式。「タ
イプ」欄を押すと、それぞれの認識マー
クの形状設定画面が表示される。
C
C
認識マーク(A or B or ABC)の図示。
基板上の認識位置
3
操作編
6-1-3
NPM-W2 EJM7DJ-MB-06O-00
ランプ1~ 4のランプ値。
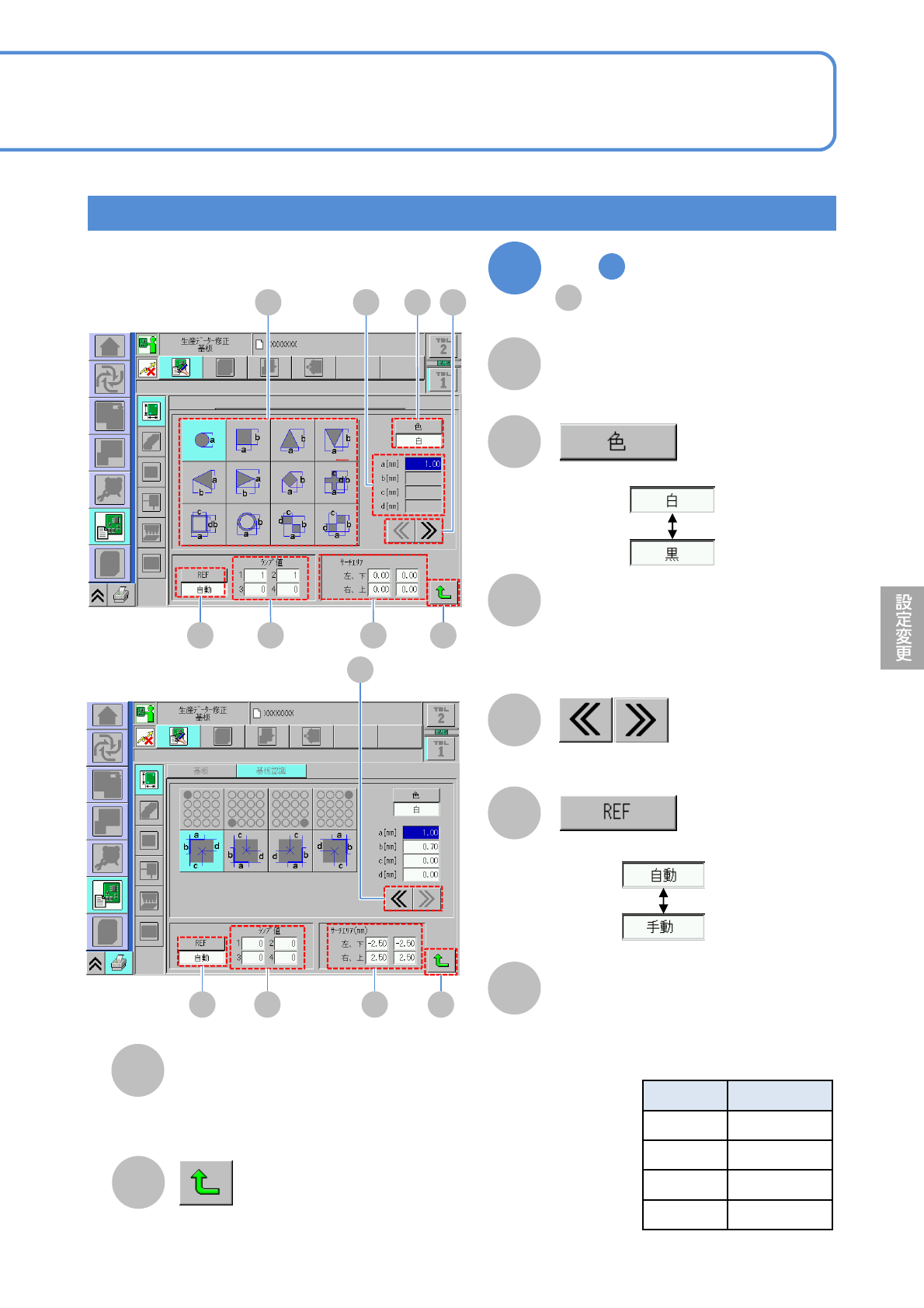
6-1-3-2
B
A
C
D
ランプ値
サイズ
認識マークの色を選ぶ。
E
明るさの調整方法を選ぶ。
F
前後の画面に切り替わる。
形状選択
サーチエリア
H
G
E F G
DA C B
元の画面に戻る。
形状選択と修正
選んだ認識マークの形状のサイズ。
●画面に触れると、入力画面が表示さ
れる。
1点の認識マークの認識範囲。
●入力欄に触れると、入力画面が表示
される。
認識マークの形状を選ぶ。
H
E F G
D
H
2
手順 (→P.6-1-3-1)画面で
1
E
(タイプ)を押す
●ヘッドカメラの照明とランプ値の関係
(→P.7-3-16)
ランプ値 照明種類
1
同軸照明
2
高角度照明
3
中角度照明
4
低角度照明