CP643 系统参考.pdf - 第109页
1.9 Advance Pick-up of Parts When the production of one board (two boards) is completed during automatic operation, a part pre-picking operation is carried out for the next board while the number of boards on the in-conv…
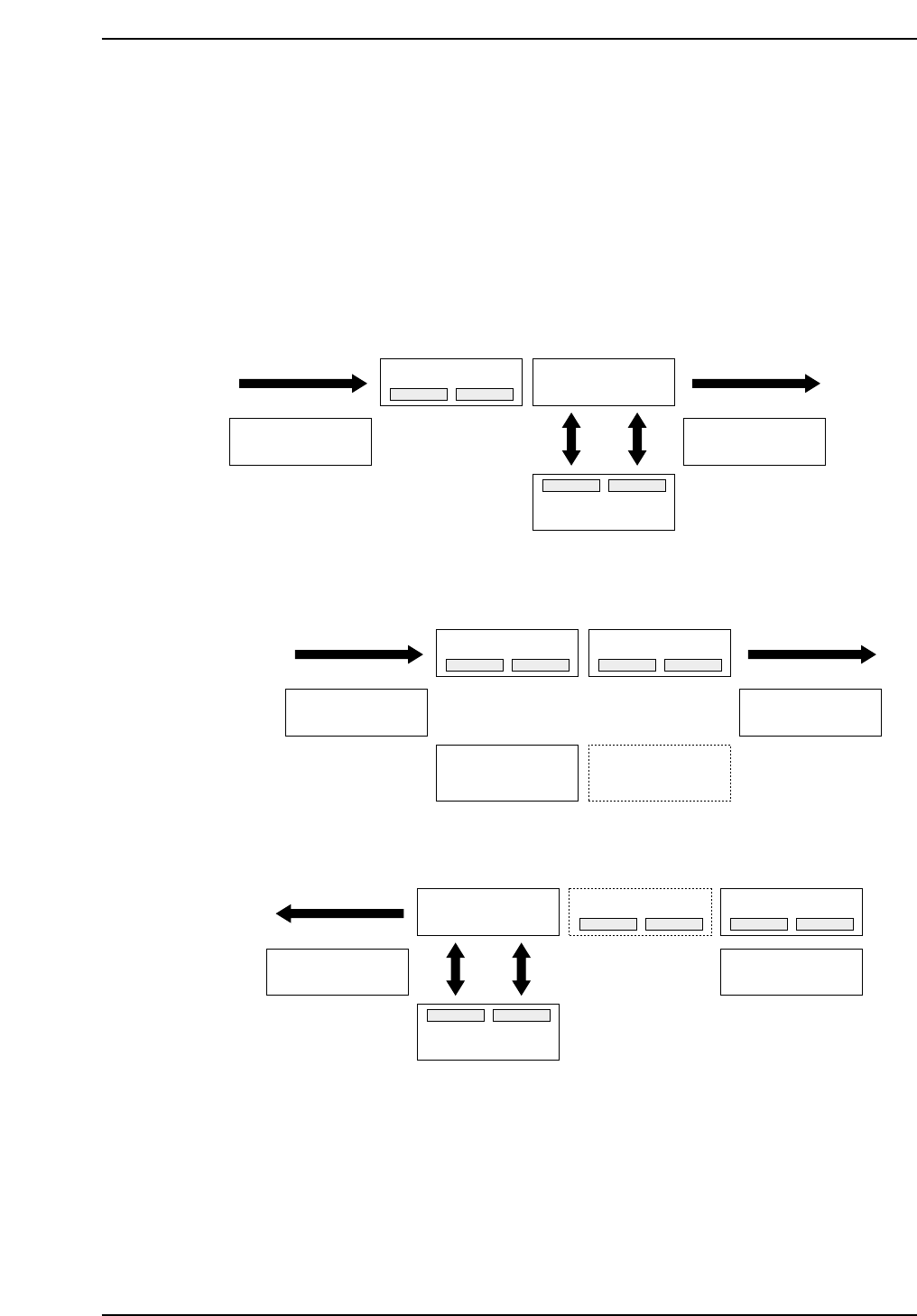
1.8 Loading and Unloading Boards
The loading and unloading of boards is carried out on a “receive and transfer” basis
using carriers.
If a board (or boards) exist on the main conveyor when production starts, the ensuing
processing will take one of the following two courses depending on the status of the
board(s) at that time.
If production is finished
The board in question is unloaded and a new board is loaded and produced.
If production has not been carried out or production is in progress
That board is produced.
In-conveyor
In-carrier Out-carrier
XY-table
Out-conveyor
Out-carrier
CP643S2035
Board loading
In-conveyor
XY-table movement
In-carrier Out-carrier
XY-tableXY-table
Out-conveyor
CP643S2034
In-conveyor
In-carrier Out-carrier
XY-table
Out-conveyor
CP643S2033
Board unloading
Part 2 Chapter 1 Basic Operation
Edition 1.1 2-1-51 CP643E System Reference

1.9 Advance Pick-up of Parts
When the production of one board (two boards) is completed during automatic
operation, a part pre-picking operation is carried out for the next board while the
number of boards on the in-conveyor and in-carrier is being determined in order to
minimize the time the machine is idle. If the number of boards held on the in-conveyor
and the in-carrier has not been determined, advance pick-up is carried out while the
boards are being counted.
Number of pre-picked parts
• Programs which include block skip mark sequences
Since the production sequence cannot be determined the pre-picking operation is not
carried out. Parts are picked after all of the block skip marks have been read.
• Programs which include fiducial mark sequences
Since the pre-picking operation and mark acquisition are carried out at the same time,
parts for the first five sequences are picked. However, if the board has not been loaded
at the time the pre-picking of these five parts has been completed then the operation
changes to pre-picking of nine parts. (The first pre-picked part stops at ST9.)
• In all other cases
Parts for the first ten sequences are pre-picked. (The first part stops at ST10.)
Minimizing the necessary cam axis stoppage that accompanies pre-picking
• If board loading is completed prior to the completion of 5-part or 10-part pre-picking
(after fiducial marks are read for 5-part pre-picking), the cam axis does not stop
temporarily and production continues.
• However under the following conditions temporary stoppage of the cam axis cannot
be avoided.
• The next board is not loaded even after pre-picking is completed.
• Fiducial mark acquisition is not completed despite the completion of pre-picking.
(5-part pre-picking mode)
• The pre-picking mode is changed from 5-part to 9-part pre-picking during
operation. A change from 5-part to 9-part pre-picking occurs if the next board is
not loaded before 5-part pre-picking is completed. When the pre-picking mode is
changed to 9-part pre-picking, fiducial mark acquisition is carried out after the
cam axis stops and operation restarts after acquisition is completed.
Positioning of the XY-axes when production of the next board starts
When mark acquisition is completed prior to the completion of pre-picking (completion
of board loading for 10-part pre-picking), the XY-axes are positioned for the sequence
assigned to ST10 after acquisition is completed.
In all other cases the XY-axes are positioned, as has been the case until now, at the first
sequence when production starts on the next board.
Part 2 Chapter 1 Basic Operation
Edition 1.1 2-1-52 CP643E System Reference

Station 11 nozzle upper limit check
If ST10 head is a skipped head, the stopper is engaged in ST11 nozzle to prevent it from
descending and the cam axis rotates even during movement of the XY-axes. As a safety
measure, a nozzle upper limit check is carried out at this time and an emergency stop
occurs if the nozzle is not at its upper limit. The error message in this case is as follows.
For a nozzle upper limit error,
ST11: Nozzle up/down error
ST11: UP-lmt sensor OFF
To ensure the part is placed on the board, a lower limit check is carried out at placement.
If the following errors occurs, it may indicate that the part has not be placed.
The error message in this case is as follows.
ST11: Nozzle up/down error
ST11: DWN-lmt sensor not ON
Part 2 Chapter 1 Basic Operation
Edition 1.1 2-1-53 CP643E System Reference