CP643 系统参考.pdf - 第181页
OUT LIFTER ▼ 352-3-0 Command Pass: [LOADER] - [Loader Pos] - [OUT CARRIER] - [OUT LIFTER ▼ ] The START button is enabled for lowering the out-lifter. Revision History V1.10 and later REMOVE PCB 352-4-0 Command Pass: [LOA…
OUT CRRY FWD 352-1-0
Command Pass: [LOADER] - [Loader Pos] - [OUT CARRIER] - [OUT CRRY FWD]
The START button is enabled for advancing the out-carrier forward.
This command can be executed when the XY-table is at its lower limit and the UP 1 sensor is
responding or when the XY-table is at the loading position.
In all other situations the message “Execute after lowering XY-table” will display. However, note
that this command cannot be executed in the following cases either.
1. If a board is on the out-conveyor
Since there is a possibility of the board on the out-conveyor interfering with pre-placed
components, the following messages will display.
“May cause interference with PCB on OUT conveyor”
“Remove PCB from OUT conveyor”
2. If the out-lifter is raised (regardless of whether there is a board or not)
The possibility of interference between pre-placed components and the out-lifter means that the
following messages will display.
“May cause interference with OUT lifter”
“Lower OUT lifter”
Revision History
V1.10 and later
OUT CRRY BWD 352-2-0
Command Pass: [LOADER] - [Loader Pos] - [OUT CARRIER] - [OUT CRRY BWD]
The START button is enabled for retracting the out-carrier.
This command can be executed when the XY-table is at its lower limit and the UP 1 sensor is
responding or when the XY-table is at the loading position.
In all other situations the message “Execute after lowering XY-table”
will display. However, note that this command cannot be executed in the following cases either.
1. If a board is on the out-conveyor and on the out-carrier
Since there is a possibility of the board on the out-conveyor interfering with pre-placed
components, the following messages will display.
“May cause interference with PCB on OUT conveyor”
“Remove PCB from OUT conveyor”
2. If the out-lifter is raised (regardless of whether there is a board or not)
The possibility of interference between pre-placed components and the out-lifter means that the
following messages will display.
“May cause interference with OUT lifter”
“Lower OUT lifter”
Revision History
V1.10 and later
Part 3 Chapter 3 Command Descriptions
Edition 1.0 3-3-20 CP643E System Reference
OUT LIFTER ▼ 352-3-0
Command Pass: [LOADER] - [Loader Pos] - [OUT CARRIER] - [OUT LIFTER ▼]
The START button is enabled for lowering the out-lifter.
Revision History
V1.10 and later
REMOVE PCB 352-4-0
Command Pass: [LOADER] - [Loader Pos] - [OUT CARRIER] - [REMOVE PCB]
The START button is enabled for transferring a board from the main conveyor to the out-carrier.
If there is a sensor error or if the start conditions have not been met, a warning message will
display.
Clear the error status in accordance with the message.
Revision History
V1.10 and later
RELEASE PCB 352-5-0
Command Pass: [LOADER] - [Loader Pos] - [OUT CARRIER] - [RELEASE PCB]
The START button is enabled for transferring a board from the out-carrier to the out-conveyor.
If there is a sensor error or if the start conditions have not been met, a warning message will
display.
Clear the error status in accordance with the message.
Revision History
V1.10 and later
Part 3 Chapter 3 Command Descriptions
Edition 1.0 3-3-21 CP643E System Reference
CYL ADJ 354-0-0
Command Pass: [LOADER] - [Loader Pos] - [CYL ADJ]
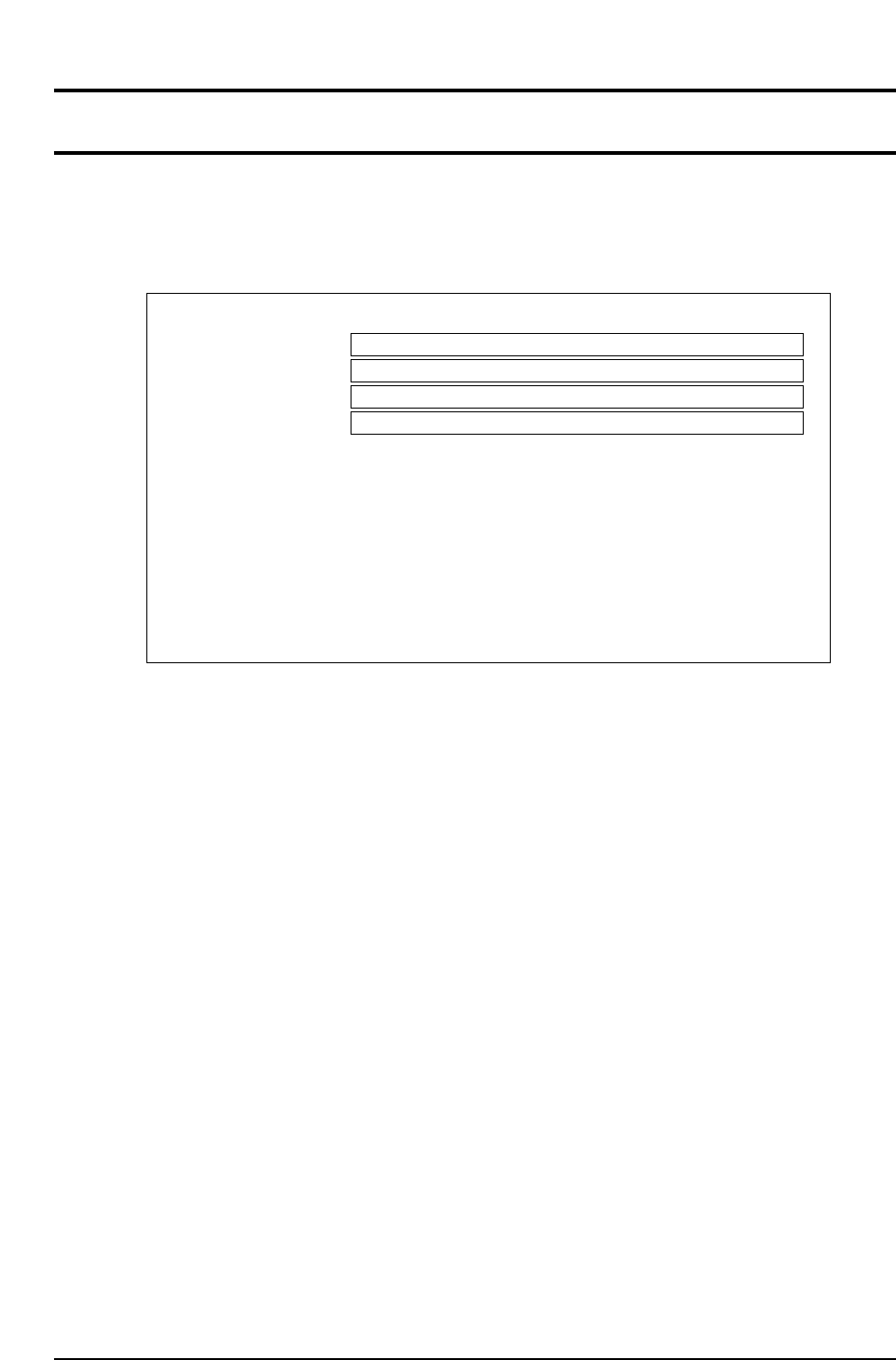
First Display Area
Explanation of the first display area
1. IN-Lif UP/DWN
• Measures the up/down operation time of the in-lifter.
• “UP” is displayed in operation section A and the operation time required to complete one up
motion is displayed in real time.
• “DWN” is displayed in operation section B and the operation time required to complete one
down motion is displayed in real time.
• The maximum time and minimum time during continuous operation are displayed
respectively in real time under Max and Min in section AB.
• Condition that can be measured
That the in-carrier is at its advance limit.
2. IN-C Clmp Fwd_F
• Measures the open/close time of the stationary side clamper at the in-carrier advance limit
position.
• “OPN” is displayed in operation section A and the operation time required to complete one
open motion is displayed in real time.
• “CLS” is displayed in operation section B and the operation time required to complete one
close motion is displayed in real time.
• The maximum time and minimum time during continuous operation are displayed
respectively in real time under Max and Min in section AB.
• Conditions that can be measured
That the in-carrier is at its advance limit.
That input exists for the XY table lower limit.
Measurement item
Movements
Result
[msec]
:
:
:
:
1. IN-Lif UP/DWN
2. IN-C Clmp Fwd_F
3. IN-C Clmp Fwd_R
4. IN-C Clmp Bwd_F
5. IN-C Clmp Bwd_R
6. IN-C Move
7. IN-PCB Load
8. Main Clmp_F
9. OUT-Lif UP/DWN
10. OUT-C Clmp Fwd_F
11. OUT-C Clmp Fwd_R
12. OUT-C Clmp Bwd_F
13. OUT-C Clmp Bwd_R
14. OUT-C Move
15. OUT-PCB UNload
16. Main Clmp_F
CP643S3009
Max: Min:
Max: Min:
Part 3 Chapter 3 Command Descriptions
Edition 1.0 3-3-22 CP643E System Reference