YV180X_Ope_E.pdf - 第110页
5 -34 EPD8008100 Operation Chapter 5 5 Creating the PCB data 3. PICK & MOUNT INFO. parameters 21. Pick Angle deg This parameter specifies the angle through which the mounter head rotates to pick up a component on the…

5
-33
EPD8008100
Operation
Chapter 5
5
Creating the PCB data
1. BASIC INFO. parameters
1. Comp. Package
Refer to the description of “3.3.1 Standard chip components” or “3.8
Setting the stick feeder component data” when stick feeders are used.
2. Feeder Type
Refer to the description of “3.3.1 Standard chip components” or “3.8
Setting the stick feeder component data” when stick feeders are used.
3. Required Nozzle
Select the optimum nozzle that matches the component size from among
the nozzle types for SOP components. (See “Nozzle table” listed in
Supplement in this manual.)
4. Feeder Set No.
Enter the feeder set number of the position at which the feeder is installed.
This parameter setting is unnecessary when the Use feeder opt. parameter
is set to “Yes.”
5. Pos. Definition
Set to “Automatic” when you set the Comp. Package parameter to “Tape”.
When using a stick feeder, refer to “3.8 Setting the stick feeder component
data” in this chapter.
6. Feeder Pos_X
Enter the position at which the head picks up the component from the
feeder. This parameter is skipped when the Pos. Definition parameter is set
to “Automatic”. For more details, refer to “3.8 Setting the stick feeder
component data” in this chapter.
2. OPTION INFO. parameters
For descriptions of the following OPTION INFO. parameters, refer to
“3.3.1 Standard chip components” in this chapter.
11. FixCmpRef.
12. Alt. Comp.
13. Use feeder opt.
14. Comp. Group No.
15. Correct Pickpos.
5
-34
EPD8008100
Operation
Chapter 5
5
Creating the PCB data
3. PICK & MOUNT INFO. parameters
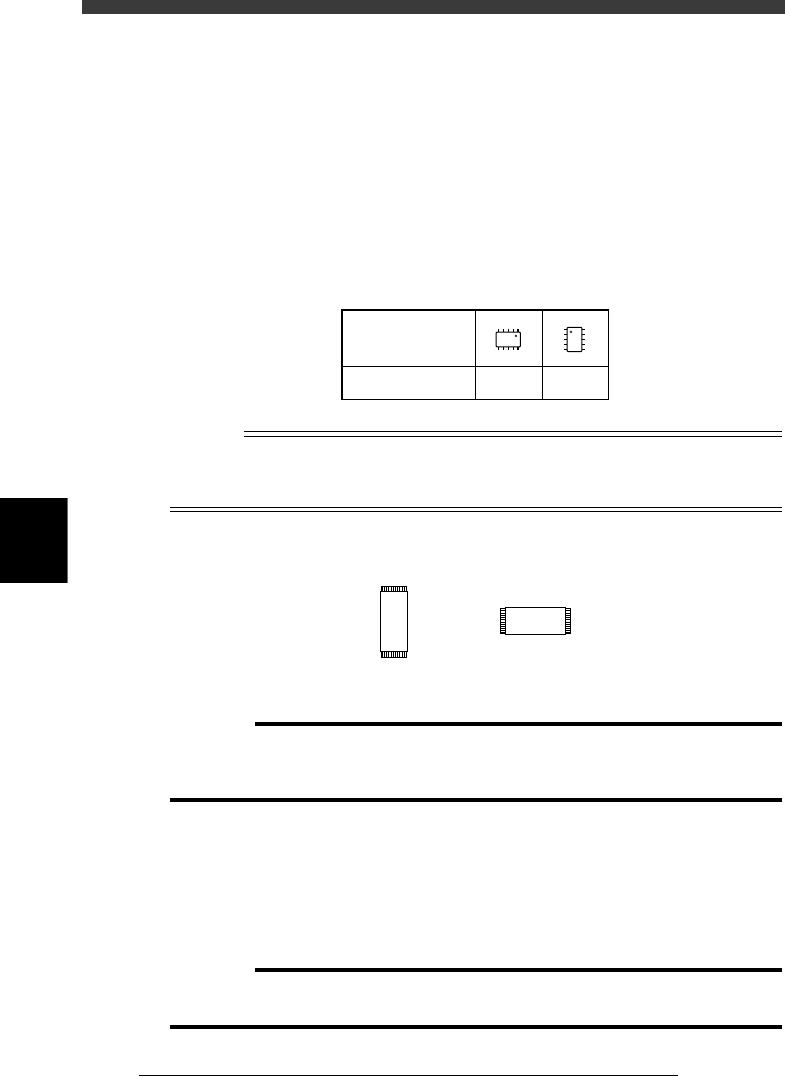
21. Pick Angle deg
This parameter specifies the angle through which the mounter head rotates
to pick up a component on the feeder. This setting determines the orienta-
tion of the component (recognition reference) when it is recognized and
displayed on the vision monitor. The pickup angle for SOP components
must be specified so that their leads face the EW directions. Set this
parameter to 0° for horizontally long components in the loading position,
and set to 90° for vertically long components. Select the correct pickup
angle referring to the table below.
SOP component pickup angle
25507-C0-00
0 deg. 90 deg.
Loading position
Pickup angle
NS
E
W
N
S
WE
n
NOTE
For components having leads on the short sides like TSOP, set the Pick Angle deg
parameter to 0° when the loading position is vertically long, and to 90° when horizontally
long.
TSOP
23512-C0-00
0˚ 90˚
c
CAUTION
Pickup angle setting directly affects the recognition reference and mounting angle. Be
careful not to mistake 0° for 180° for horizontally long components in the loading
position and 90° for -90° for vertically long components.
22. Pick Timer, Mount Timer
These parameters specify the time duration (in seconds) for which the head
stays in the lowered position after detecting the reference pickup or mount
vacuum pressure when picking up or mounting a component. In most
cases, it is okay to set these parameters to “0.00”. If pickup or mount
operation is not stable, set a longer timer value.
c
CAUTION
Setting the Pick Timer and Mount Timer longer than necessary may have adverse
effects on the cycle time.

5
-35
EPD8008100
Operation
Chapter 5
5
Creating the PCB data
23. Pick Height, Mount Height
Refer to the description in “3.3.1 Standard chip components”.
24. Pick Sequence
Refer to the description in “3.3.1 Standard chip components”.
25. Mount Action
This specifies the nozzle descent movements during component mounting.
Set this parameter to “Normal” in most cases.
26. Vacuum Check
Refer to the description in “3.3.1 Standard chip components”.
27. Pick Vacuum, Mount Vacuum
These are reference vacuum pressures used for checking the pickup and
mount vacuum levels. Use the default settings and adjust them as needed
in the Adjust Assistant mode. (See “3.7” in this chapter.)
28. Conv. Y Speed
Refer to the description in “3.3.1 Standard chip components”.
4. DUMP INFO. parameters
31. Dump Way
Set to “Dump POS” (discard point). See the mounter service manual for
details on the discard point.
32. Retry Times
Refer to the description in “3.3.1 Standard chip components”.
5. VISION INFO. parameters
41. Alignment Group
Set this parameter to “IC”.
42. Alignment Type
Set this parameter to “SOP”.
43. AlignmentModule
This parameter specifies the lighting method for recognizing a component.
Use the default setting (Fore&Back&Laser) in most cases. Refer to the
description in “3.3.1” for more details.
For descriptions of the following VISION INFO. parameters, refer to
“3.3.1 Standard chip components”.
44. Light Selection
45. Lighting Level
46. Comp. Threshold
47. Comp. Tolerance
48. Search Area
49. Datum Angle
50. Comp. Intensity
51. MultiCam. Marker