YV180X_Ope_E.pdf - 第143页
5 -67 EPD8013110 Operation Chapter 5 5 Creating the PCB data 8 Perform teaching for the pickup position. Referring to the procedure below , perform teaching for the coordinates of the component pickup position. 1. Press …
5
-66
EPD8013110
Operation
Chapter 5
5
Creating the PCB data
4 Set the “Feeder Type” parameter.
Using the [INS], [DEL] or [SPACE] key, set this parameter according to the
stick feeder type you will use.
• Multi-stick feeder
For general multi-stick feeders, set this parameter to “Multistick”. For
wide multi-stick feeders, set to “WideMultiStk”.
• Single stick feeder
Select from among “Stick 15mm, “Stick 20mm”, “Stick 25mm”, “Stick
30mm” and “Stick 35mm” according to the stick width. For other
stick feeders, select from “Stick-A” to “Stick-G”. (See the reference
below.)
• High-speed stick feeder
Select from among “HS-Stick-L06”, “HS-Stick-L09”, “HS-Stick-L13”,
“HS-Stick-L16”, “HS-Stick-L20”and “HS-Stick-L26”. (Each number
indicates the length of component.) For other high-speed stick
feeders, select from “HS-Stick-A” to “HS-Stick-D”. (See the reference
below.)
• Stacked stick feeder
Select from among “StackStk-L06”, “StackStk-L09”, “StackStk-L13”,
“StackStk-L16”, “StackStk-L20”and “StackStk-L26”. (Each number
indicates the length of component.) For other stacked stick feeders,
select from “StackStk-A” to “StackStk-D”. (See the reference below.)
Reference
When you set the Feeder Type parameter to “HS-Stick A to D” or “StackStk-A to D”, you
must first make correct settings for ”FEEDER SPEC. CMN.” of <3/1/B4 FEEDER SPEC.
INF> in the MAINTENANCE Manager. For details on settings, refer to the mounter
service manual.
5 Set the feeder set No. in the BASIC INFO. sub-window.
Enter the number of the feeder set position at which the stick feeder
knockpins are inserted into the feeder plate.
6 Set the Pos. Definition parameter.
Set this parameter to “Automatic” when not using a multi-stick feeder and
advance to Step 9. When using a multi-stick feeder, proceed to Step 7.
7 Move the teaching unit to the feeder set position by trace.
1. Set the Pos. Definition parameter to “Automatic”.
The coordinate of the feeder set position specified in Step 5 is auto-
matically entered in the Feeder Pos_X column.
2. Press the [TAB] key to return the cursor back to the main window.
Check that the cursor is positioned on the data line you are editing.
3. Press the [F9] key to perform trace.
The teaching unit moves to the position specified in the Feeder Pos_X
column. The trace (teaching) conditions should be set as follows.
Teaching unit : Select “camera”
Speed : Select a slow speed (SPEED=20 to 40).
Fiducial : Select “NotUse”.
5
-67
EPD8013110
Operation
Chapter 5
5
Creating the PCB data
8 Perform teaching for the pickup position.
Referring to the procedure below, perform teaching for the coordinates of
the component pickup position.
1. Press the [TAB] key to move the cursor back to the BASIC INFO. sub-
window.
2. Change the Pos. Definition parameter to “Relative”.
3. Move the cursor to “Feeder Pos_X mm”.
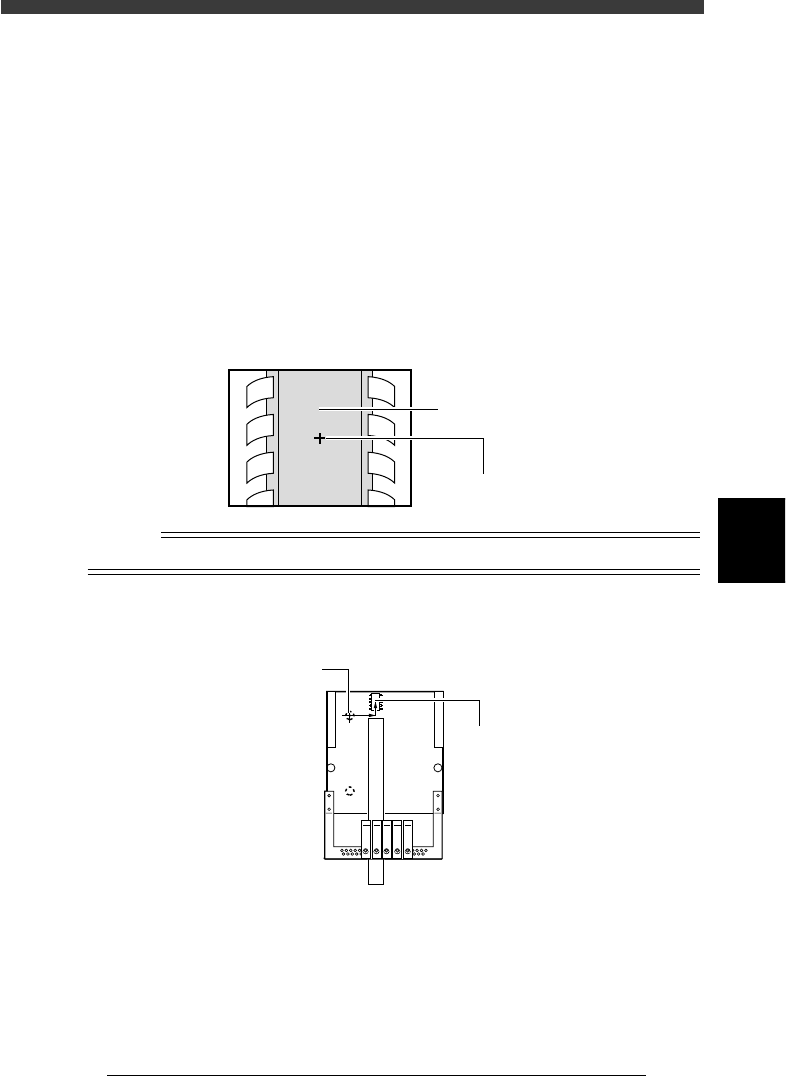
4. Manipulate the YPU joystick to move the camera directly above the
component to be picked up.
Making sure that the cross cursor is positioned at the center of the
component, press the [F10] key twice to perform teaching. The
teaching position coordinates relative to the feeder knockpin have now
been entered.
Teaching position
23525-C0-00
Component
Cross cursor
(Teaching position)
Reference
Marking at the center of the component with a pencil makes it easier to perform teaching.
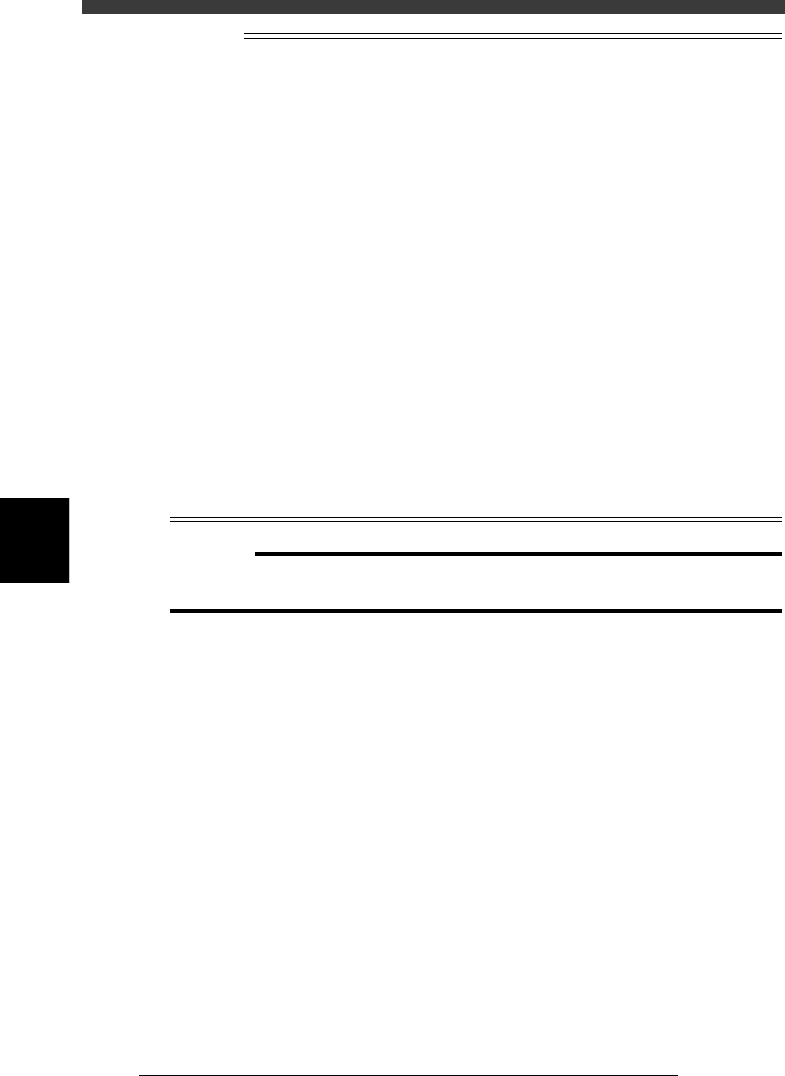
Teaching position coordinates
23526-C0-00
X
Y
Feeder
positioning
knockpin
Pickup poin
tPickup point
Pickup poin
t
5
-68
EPD8013110
Operation
Chapter 5
5
Creating the PCB data
n
NOTE
About “Pos. Definition”
This is a parameter to specify the method for obtaining the coordinates of a component
pickup position.
“Automatic”:
When “Automatic” is selected, the machine automatically calculates the pickup position
based on the feeder plate reference position specified on the FeederPlateOffset screen
available from the <3/2/MCH_DATA>→“Machine” menu. What you have to do is just
enter a value in the Feeder Set No. column. Select this setting when using components
whose pickup position is independent of the component size, such as tape feeders.
“Teaching”:
Select “Teaching” when using components whose pickup position varies depending on the
component type, such as multi-stick feeders. In this case, you must perform teaching for
the pickup position with respect to the machine origin. Since the feeder set position has to
be fixed when “Teaching” is selected, the data optimization in the <2/2/
DADA_GENERATOR> mode is not applied.
“Relative”:
As with “Teaching”, select this setting when using components whose pickup position
varies depending on the component type, such as multi-stick feeders. In this case, however,
the pickup position will be a distance from the reference pickup position (feeder position-
ing knockpin) of an 8mm tape feeder. Unlike “Teaching”, the data optimization in the <2/
2/DADA_GENERATOR> mode can be applied. Off-line data input is also possible.
c
CAUTION
When you make off-line settings, enter the correct X distance from the feeder knockpin
to the component pickup point in the Feeder Pos_X column.
9 Set the Use feeder opt. parameter in the OPTION INFO.
sub-window to “Yes”.
Use the [INS], [DEL] or [SPACE] key to set this parameter to “Yes”.