YV180X_Ope_E.pdf - 第99页
5 -23 EPD8008100 Operation Chapter 5 5 Creating the PCB data 3.3.2 Melf components (cylindrical components) Melf components are registered with the parameters sho wn below . MELF component parameters 27511-D8-00 6. SHAPE…
5
-22
EPD8008100
Operation
Chapter 5
5
Creating the PCB data
“Exist”.)
50. Comp. Intensity
This parameter specifies the threshold level used to measure the intensity
in the outline area of a component after it is sucessfully identified by
normal vision recognition. If the measured intensity level is lower than this
threshold, the recognition result is viewed as an error. (This parameter is
enabled only when “Alignment Type” is set to “Std.Chip”.
51. MultiCam. Marker
When this parameter is set to “Use”, the multi-vision camera recognizes
the reference marker(s) provided on the head assembly and the results are
reflected on component recognition. This function is effective in maintain-
ing recognition accuracy even if the machine precision degrades with
operating time, but the recongnition time becomes longer.
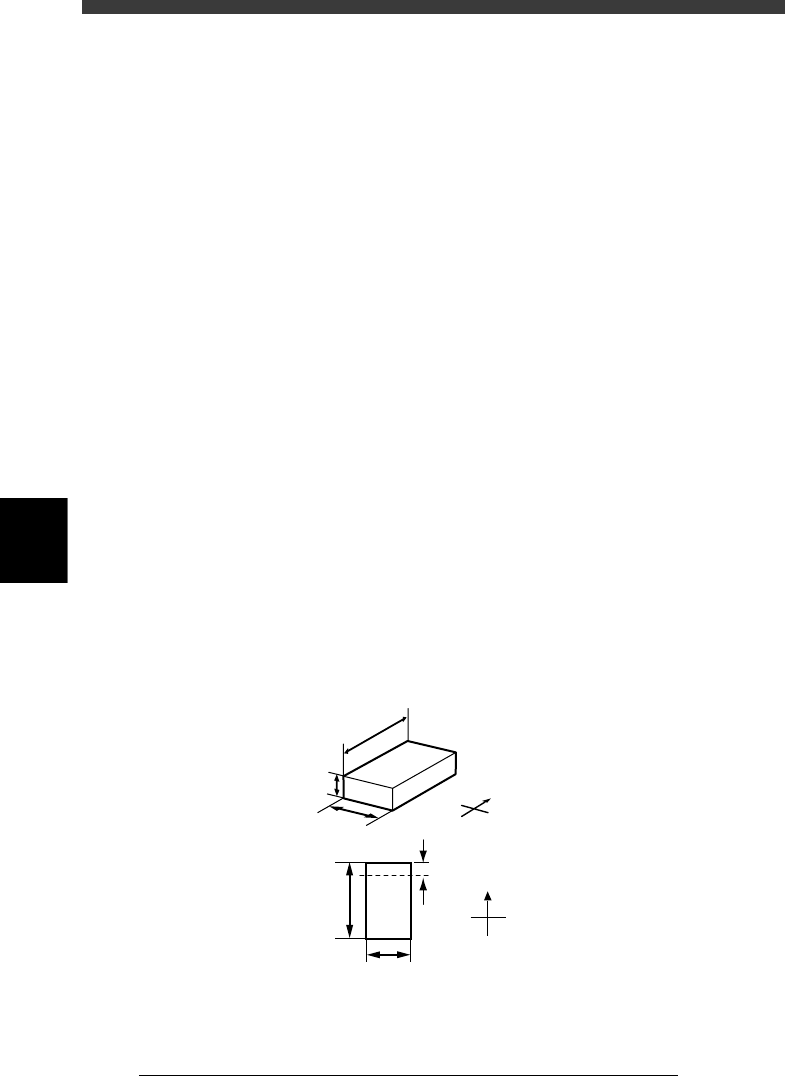
6. SHAPE INFO. parameters
Set these parameters after specifying the VISION INFO. parameters. If
“Alignment Type” is undefined, the following parameters are not dis-
played.
61. Body Size X, Body Size Y
Enter the correct dimensions measured with a vernier caliper or microme-
ter.
62. Body Size Z
Enter the correct thickness measured with a vernier caliper or micrometer.
63. Ruler Offset
This parameter specifies the distance in pixels, from the end of the
component to an imaginary ruler line used to measure the lead width. Use
the default setting in most cases.
SHAPE INFO. parameters for chip components
23508-C0-00
N
S
E
W
A
A
C
B
D
B
N
S
E
W
A : Body Size X
B : Body Size Y
C : Body Size Z
D : Ruler Offset
5
-23
EPD8008100
Operation
Chapter 5
5
Creating the PCB data
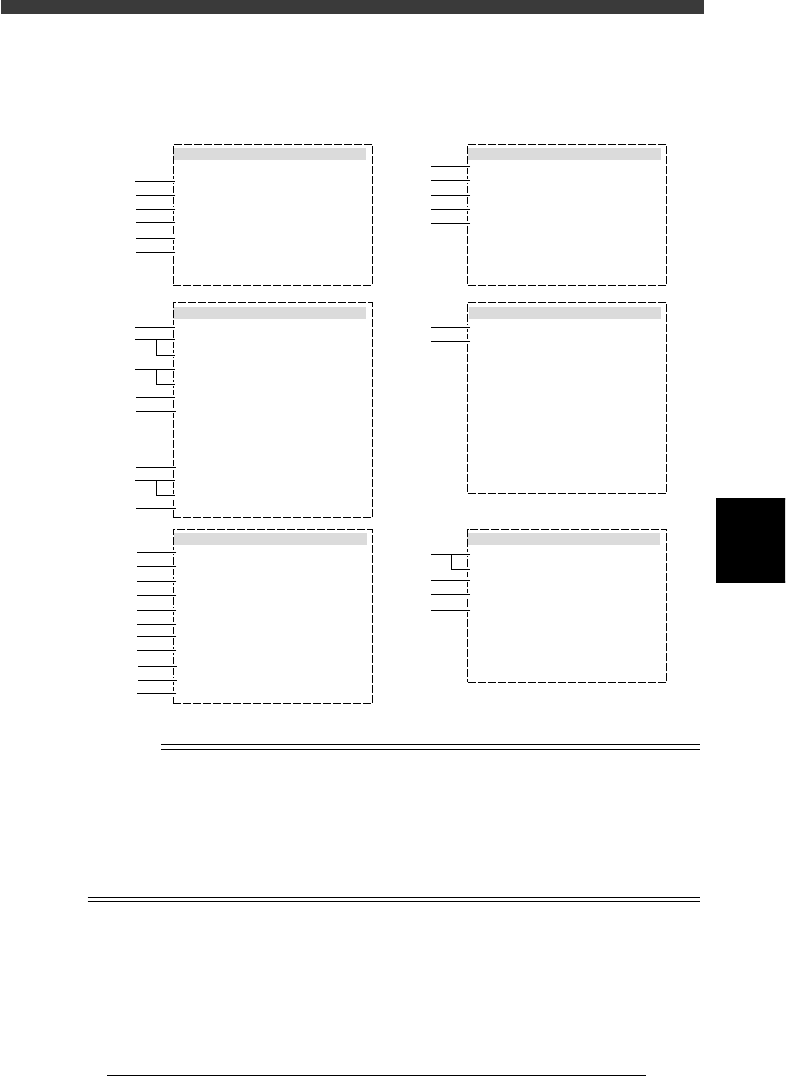
3.3.2 Melf components (cylindrical components)
Melf components are registered with the parameters shown below.
MELF component parameters
27511-D8-00
6. SHAPE INFO.
Body Size X
Body Size Y
Body Size Z
Ruler Offset
LeadWidth
:
:
:
:
:
1.25
2.00
1.25
3
0.40
5. VISION INFO.
Alignment Group
Alignment Type
AlignmentModule
Light Selection
Lighting Level
Comp. Threshold
Comp. Tolerance
Search Area mm
Datum Angle
Comp. Intensity
MultiCam. Marker
:
:
:
:
:
:
:
:
:
:
:
Chip
Melf Chip
Fore&Back&Las
Main + Coax
6/8
Normal
NotUse
55
30
1.50
0
1. BASIC INFO.
Database No.
Comp. Package
Feeder Type
Required Nozzle
Feeder Set No.
Pos. Definition
Feeder Pos_X mm
:
:
:
:
:
:
:
Tape
8mm Tape
ForMELF S 72
Automatic
521
10
39.79
2. OPTION INFO.
FixCmpRef.
AIt.Cmp
Use feeder opt.
Comp. Group No.
Correct Pickpos
:
:
:
:
:
Yes
Not Use
0
0
0
3. PICK AND MOUNT INFO.
Pick Angle deg
Pick Timer
Mount Timer
Pick Height
Mnt Height
Pick Sequence
Mount Action
Mount Speed
PickupSpeed
XY Speed
Vacuum Check
Pick Vacuum
Mount Vacuum
Conv. Y Speed
:
:
:
:
:
:
:
:
:
:
:
:
:
:
4. DUMP INFO.
Dump Way
Retry Times
:
:
Dump POS
2
s
s
mm
mm
%
%
%
%
%
0
0.00
0.00
Normal
NORMAL
100
100
100
NORMAL CHK
FAST
0.5
0.5
50
50
1
2
3
4
5
6
41
42
43
44
45
46
47
48
49
50
51
11
12
13
14
15
31
32
61
62
63
64
21
22
23
24
25
26
27
28
29
n
NOTE
When setting the parameters shown in the sub-windows above, use the number keys to set
the parameters aligned on the right, while using the [INS], [DEL] or [Space] key to set
the parameters aligned on the left. However, there are some parameters which should be
set or optimized with the Adjust Assistant commands described later in “3.7” in this
chapter.
The displayed parameters differ slightly depending on the <3/1/A1 OPTION CONFIG>
settings.
5
-24
EPD8008100
Operation
Chapter 5
5
Creating the PCB data
1. BASIC INFO. parameters
For descriptions of the BASIC INFO. parameters other than “3 Required
Nozzle”, refer to “3.3.1 Standard chip components” in this chapter.
1. Comp. Package
2. Feeder Type
3. Required Nozzle
4. Feeder Set No.
5. Pos. Definition
6. Feeder Pos_X
2. OPTION INFO. parameters
For descriptions of the following OPTION INFO. parameters, refer to
“3.3.1 Standard chip components” in this chapter.
11. FixCmpRef.
12. Alt. Comp.
13. Use feeder opt.
14. Comp. Group No.
15. Correct Pickpos.
3. PICK & MOUNT INFO. parameters
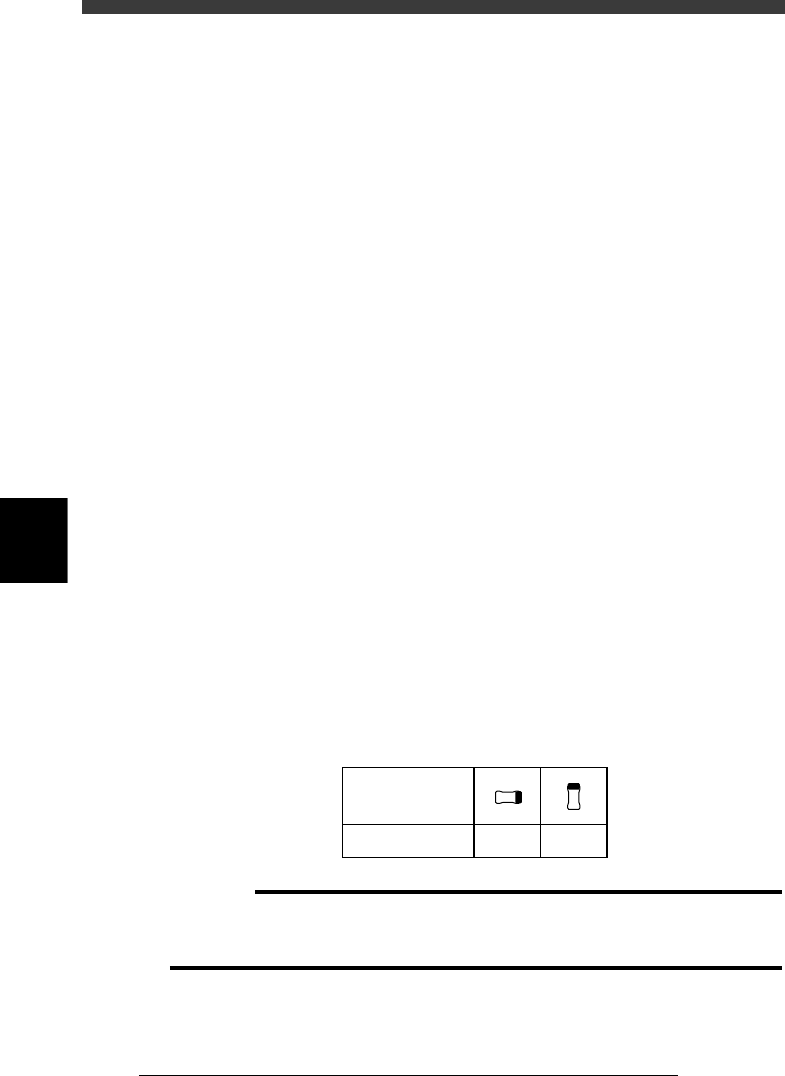
21. Pick Angle deg
This parameter specifies the angle through which the mounter head rotates
to pick up a component on the feeder. This setting determines the orienta-
tion of the component (recognition reference) when it is recognized and
displayed on the vision monitor. Normally, set this parameter to 0° for
horizontally long components in the loading position, and set to 90° for
vertically long components. Select the correct pickup angle referring to the
table below.
Melf component pickup angle
25504-C0-00
0 deg. 90 deg.
Loading position
Pickup angle
NS
E
W
N
S
WE
c
CAUTION
Pickup angle setting directly affects the recognition reference and mounting angle. Be
careful not to mistake 0° for 180° for horizontally long components in the loading
position and 90° for -90° for vertically long components.