RS-1使用说明书.pdf - 第647页
第 2 部 功能详解 篇 第 6 章 通用图像元件 6-8 1 2 当用 DOG 过滤 器进行识别 时, 可以用参数 1 设置检 测窗的引脚长度方 向补偿量 。 (单位为μ m ) 参数 2 将来的扩 展用参数 ,当前未使用 。 (8) 在元件要素组 内有遗漏 ( 欠 缺 ) 时,按距 离首元件要素 近的顺序来 设定遗漏信息 。 对于 1 列或 1 行,最多可 设定 4 个遗漏信息 。 (9) 输入元件要 素信息。 ・ 选择了球或平 面…
第 2 部 功能详解篇 第 6 章 通用图像元件
6-7
(7)
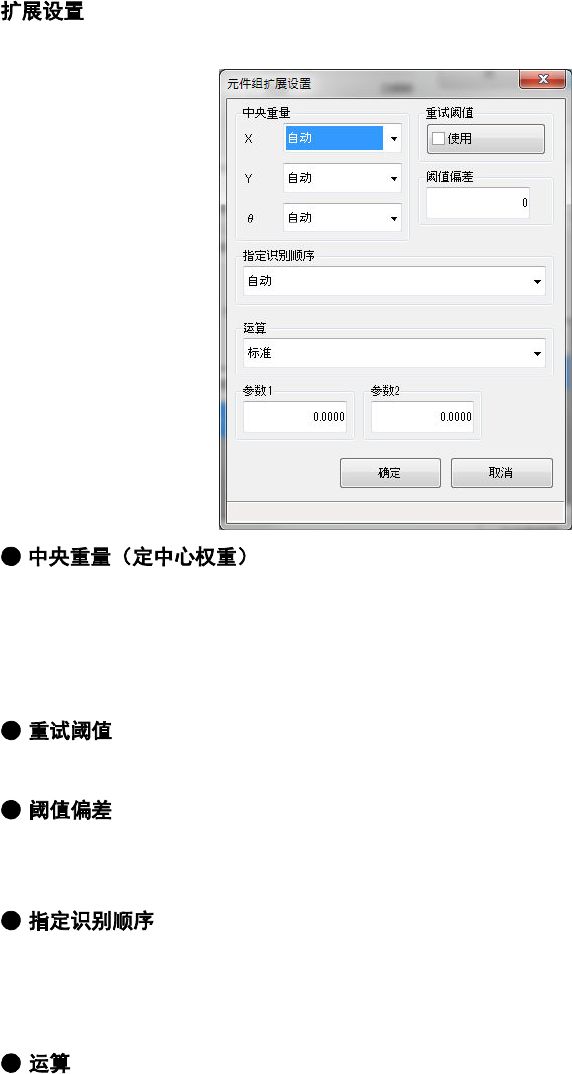
输入各元件要素扩展设置。
设置X、Y、θ的重量(权重)。
此处重量(权重),是指为元件定位设置该元件要素组的权重参数。减少元件精度低的部
分的元件要素组的权重参数,可使元件定位结果稳定。
可设置1~100的数值。
设置重试阈值的ON/OFF。对比度不好时,有时可改善识别错误。
与外形识别的明暗校正相同,可设置阈值偏差。使用自动计算出的阈值识别不稳定时,可
使用此项。
指定识别顺序能稳定识别时,可设置定义顺序。在通常情况下请维持自动。
◇自动:不指定识别顺序。
◇定义顺序:按定义顺序识别。
设置边、角、引脚等的运算(算法)。对于边和角等外形元件,使用标准运算追加了粗定
位处理,比以往提高了对位置偏移及异形元件的对应力。设置,也可选择以往的算法。
其他的元件要素是将来的扩展用参数。
◇标准:使用标准算法。
◇过去算法:使用与以往相同的算法。
在其他元件要素中,除了标准的运算法外,在引脚元件因板金等原因部分被遮的情况下,
或者应用形状数据匹配(3rd)进行识别时,可以选择针对性的算法。
◇标准:使用标准算法。
◇运算法1:用其他元件要素进行粗定位,再加上以DOG过滤器进行识别。
◇运算法2:用形状数据匹配(3rd)进行粗定位,再加上以DOG过滤器进行定位识别。
第 2 部 功能详解篇 第 6 章 通用图像元件
6-8
1 2
当用DOG过滤器进行识别时,可以用参数1设置检测窗的引脚长度方向补偿量。
(单位为μm)
参数2将来的扩展用参数,当前未使用。
(8)
在元件要素组内有遗漏(欠缺)时,按距离首元件要素近的顺序来设定遗漏信息。
对于 1 列或 1 行,最多可设定 4 个遗漏信息。
(9)
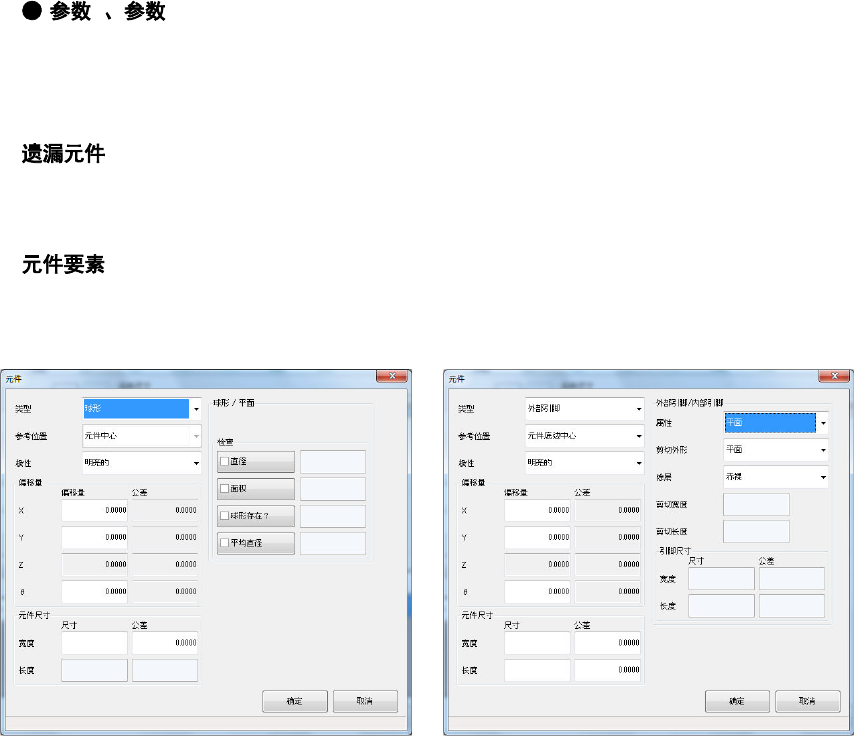
输入元件要素信息。
・选择了球或平面(Land)时的画面 ・选择了外部引脚或内部引脚时的画面
● 类型
选择元件要素的类型。
显示列表根据“点、1D、2D”的指定而变化。
◇外部引脚: 鸥翼形引脚(QFP等)。
◇内部引脚: J形引脚(QFJ等)。
◇标记: 因为是标记等,没有电极,所以不用检查。
◇边: 因元件要素形状不规则,只有用边才能取得时。
◇角: 因元件要素形状不规则,只有用角才能取得时。
有关设定方法请参见下页。
● 参考位置(基准位置)
可指定首元件要素的基准位置。
推荐对引脚元件指定“背面的中心(引脚前端的中央)”,对球元件指定“元件要素的中心(球的中
央)”。
● 极性
指定元件要素的明亮度。如元件要素比背景亮时,请选择“明亮”。
● 偏移量
需要比元件要素组的“首元件要素的配置”更偏离时指定此项。
● 元件尺寸(元件要素尺寸)
输入元件要素的纵、横尺寸。
第 2 部 功能详解篇 第 6 章 通用图像元件
6-9
● 球形/平面
在“类型”中选择了球形或平面(Land)时显示此项。
选择球形或平面的形状。(但现在不进行形状判别。)
● 外部引脚/内部引脚
在“类型”中选择了外部引脚或内部引脚时显示此项。
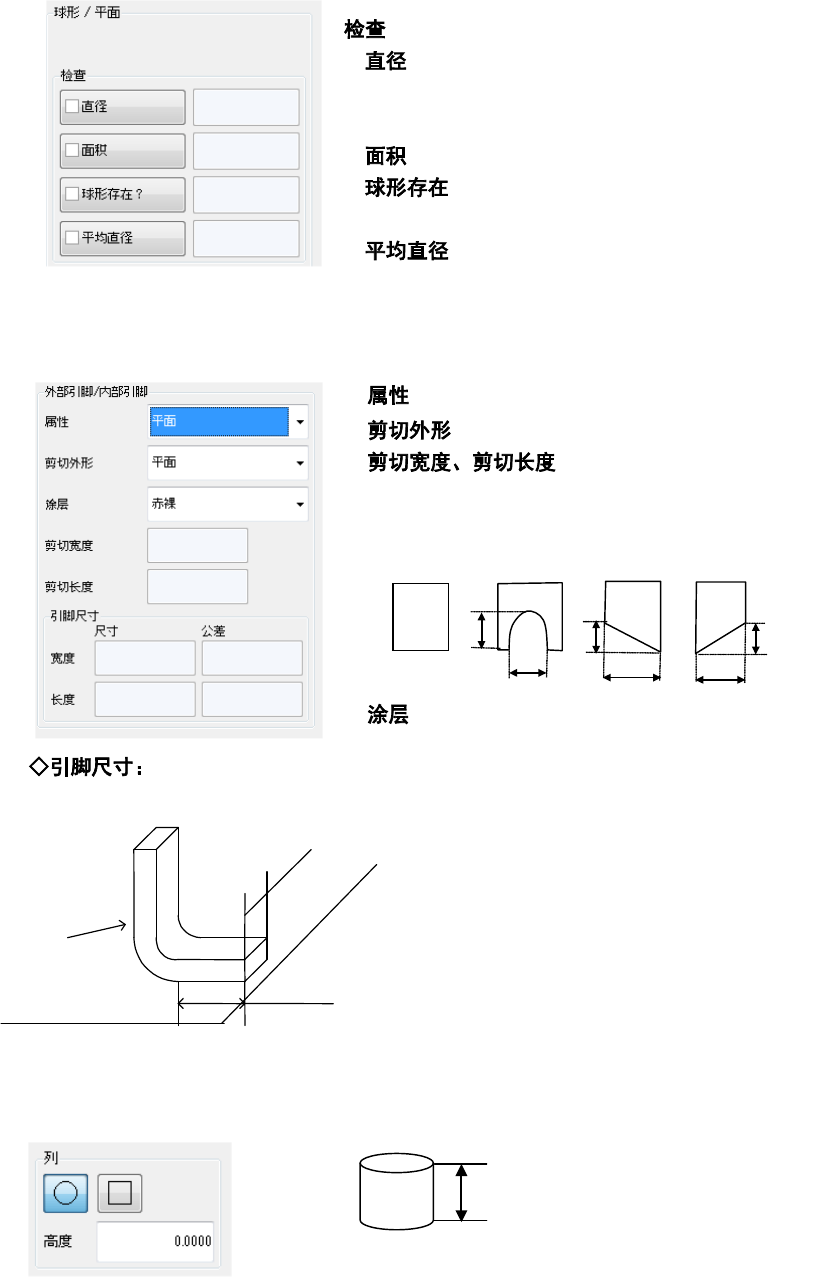
当使用鸥翼形引脚时,输入与基板接触的引脚前端部位的宽和长。
长度
宽度
引脚
基板
● 列
在“类型”中选择了列时显示此项。目前没有使用。
: 指定有无检查和判定値。
◇ :指定直径检查。
所有球经过检查,以其平均值为基准,进行的
各球的检查。
◇ :指定面积检查。
◇ ? :指定检查有无球。
初始值的 30%为可检测出 20%的球剪切的値。
◇ :以输入的直径为基准,对检查完的所
有球的平均值进行比较检查。
◇ :指定引脚的类型。
◇ :选择引脚前端被切割时的剪切形状。
◇ :
选择 U 形切割、左下切割、右下剪切时输入此
项。
平面 U 形剪切 左下剪切 右下剪切
◇ :可以指定引脚的涂层类型,目前没有使用。
宽
长
宽
宽
长
长
高度