Q170226E01.pdf - 第247页
RH5 SERVICE MANUAL 7.0−2 DA3SEC−84−000−A0 DA3SEC−84−000−A0 Sentence No. 7. MAINTENANCE GUIDE (CONTROL) This chapter describes the adjustment procedures related to controls such as AC servomotor drivers. x Consider and pr…

SERVICE MANUAL
RH5
7.0−1
7ダミー(Sectionのレベル1)
7.0ダミー(Sectionのレベル2)
RH5
SERVICE MANUAL
7.0−2
DA3SEC−84−000−A0
DA3SEC−84−000−A0
Sentence No.
7. MAINTENANCE GUIDE
(CONTROL)
This chapter describes the adjustment procedures related to controls such as AC
servomotor drivers.
x Consider and practice safety at all times when operating or servicing the
equipment.
x Be sure to read “Safety Precautions” in chapter 1 carefully.
7.1 NC Unit Adjustment
SERVICE MANUAL
RH5
7.1−1
DA3SEC−84−290−A0
7.1 NC Unit Adjustment
DA3SEC−84−290−A0
Sentence No.
7.1.1 Table Signal Connection Check
(1) + LM and − LM switch check
In this state, move the X−axis in the + direction, checking the X + limit monitor lights up. Next, move
the X−axis in the − direction, checking the X − limit monitor lights up. Check both the Y and Z axes in
the same way.
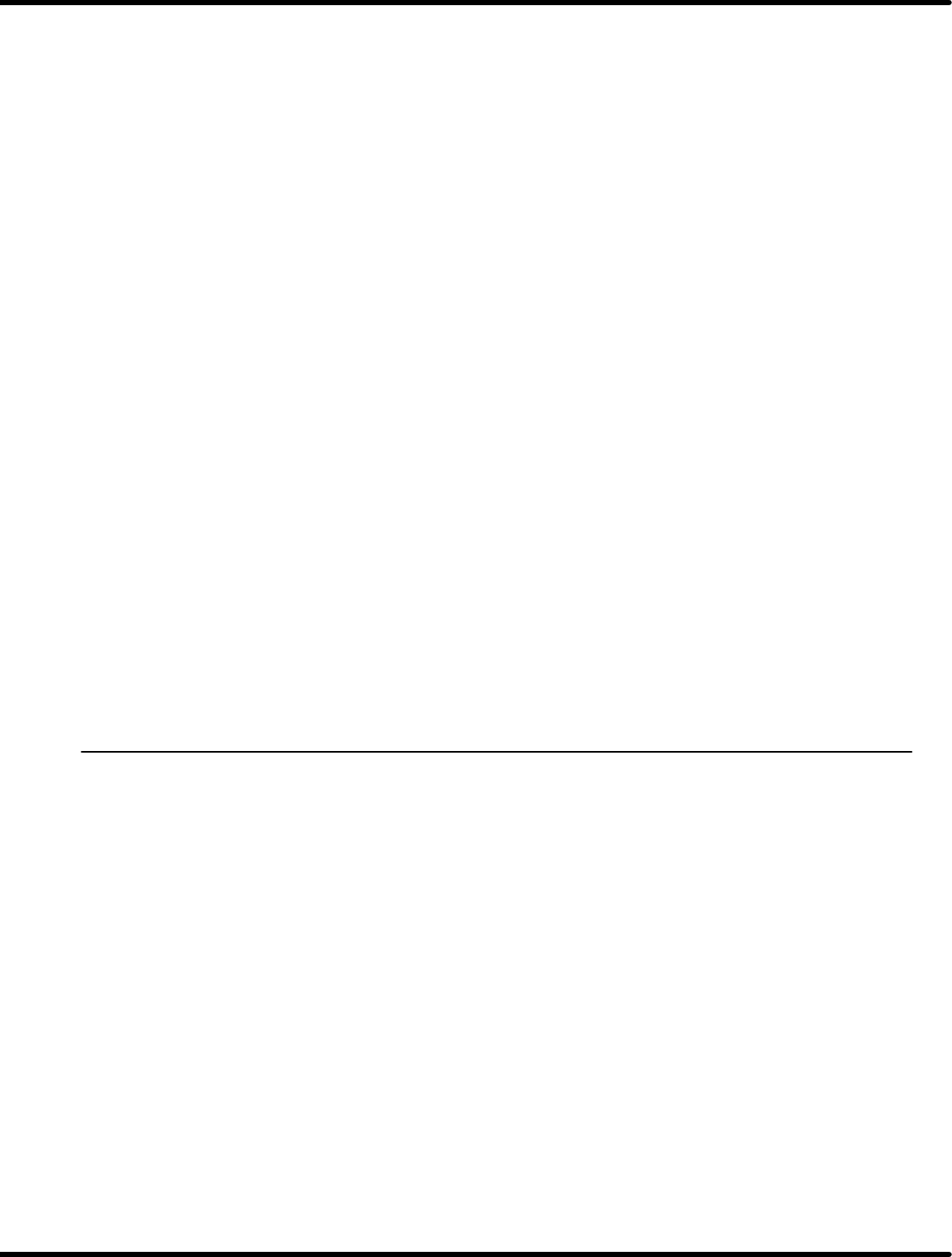
(2) + LM and − LM switch installation position check
Slowly push the table in the direction of the limit switch. Stop pushing the table on the instant the limit
sensor detects the table.
X−Y table
Slit plate
Limit sensor photohimic
Figure 7.1−1−: + LM and − LM Installation Position
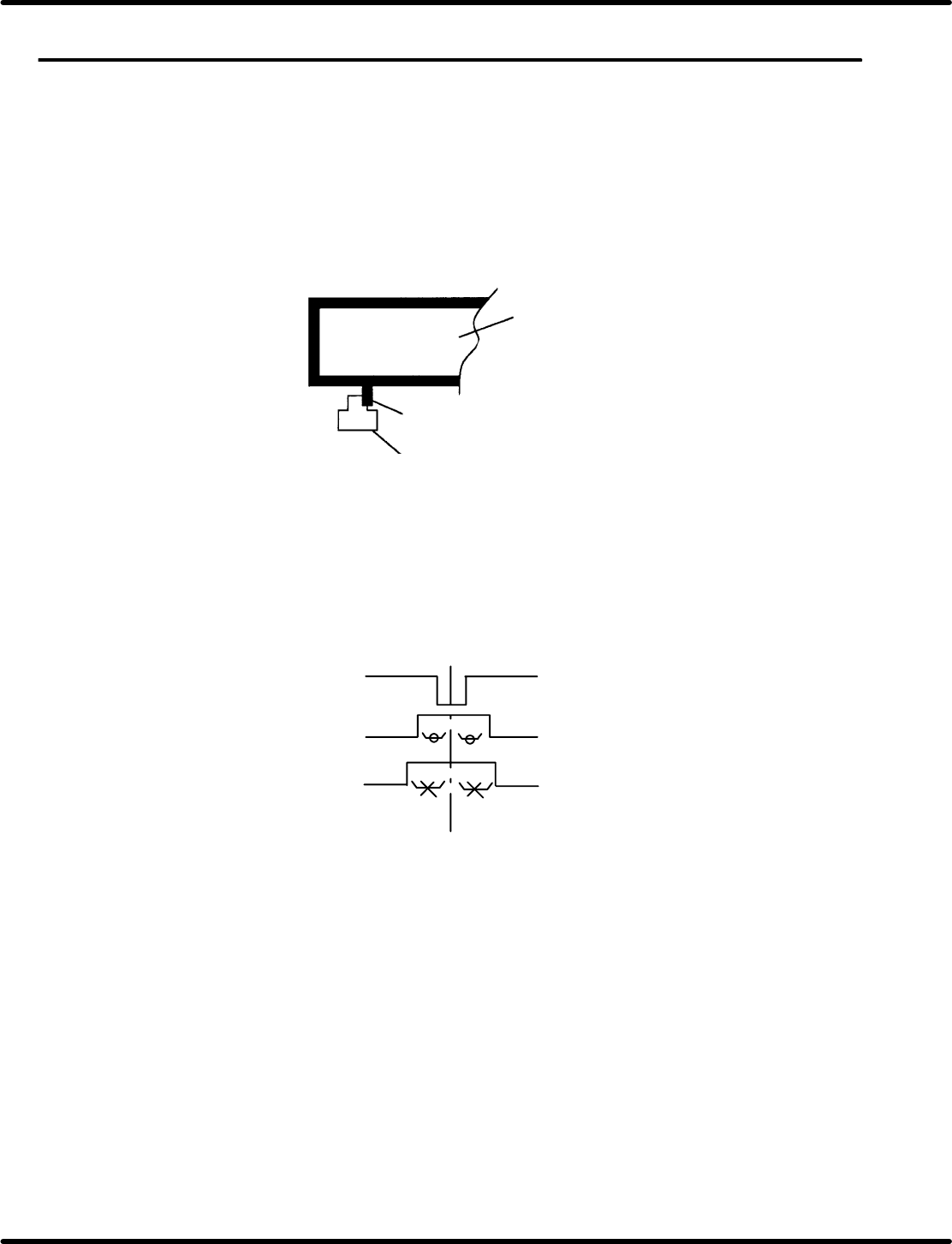
(3) Origin slow signal and table origin signal
Adjust the origin slow signal and table origin signal on the center of the Z phase signal generated by
the pulse encoder.
Z phase signal
Table origin signal
Origin slow signal
Center on Z phase signal
Center on Z phase signal
Figure 7.1−2−
(4) Safety SW check
Safety switches (limits switches ) are installed on the X/Y axis’ center and on both sides of the Z axis.
They trip when the table runs out of control.
Check each safety switch trips when doused (the servolock engages). If the safety switch (limit
switch) is turned ON (doused) while the table is moving (safety limit error stop), speed command
voltage inside the AC motor driver is cut to 0 V (zero−clamp), forcing the table to stop instantly.