RS-1R使用说明书.pdf - 第124页
第 1 部 基本篇 第 2 章 生产 2- 12 2) 手动方 式 He ad 有激光脏污时,请 进行 「 手动方式 」 。 手动取出吸嘴归 还时,请务必确 认 H ead 已经停止 后,再进行 归还。 手动方式与前面 所述相同, 是由操作人员将 H ead 移动到方便用手 取出吸嘴 的位置, 从 Hea d 上取下吸嘴归还 到 AT C 的方式。 移动 H ead 和 AT C 开关,请选择 [ 简易轴控制 ] 按钮进行 控制。 「在…
第 1 部 基本篇 第 2 章 生产
2-11
(3) 使吸嘴返回 ATC,有「半自动方式」和「手动方式」两种操作方法。
「半自动方式」:按[半自动归还吸嘴]按钮。
「手动方式」 :使用简易轴控制,控制 XY 轴、控制 Z 轴、操作 ATC 开关,将 Head 移动到方
便操作人员取下的位置,用手从 Head 上取下吸嘴。
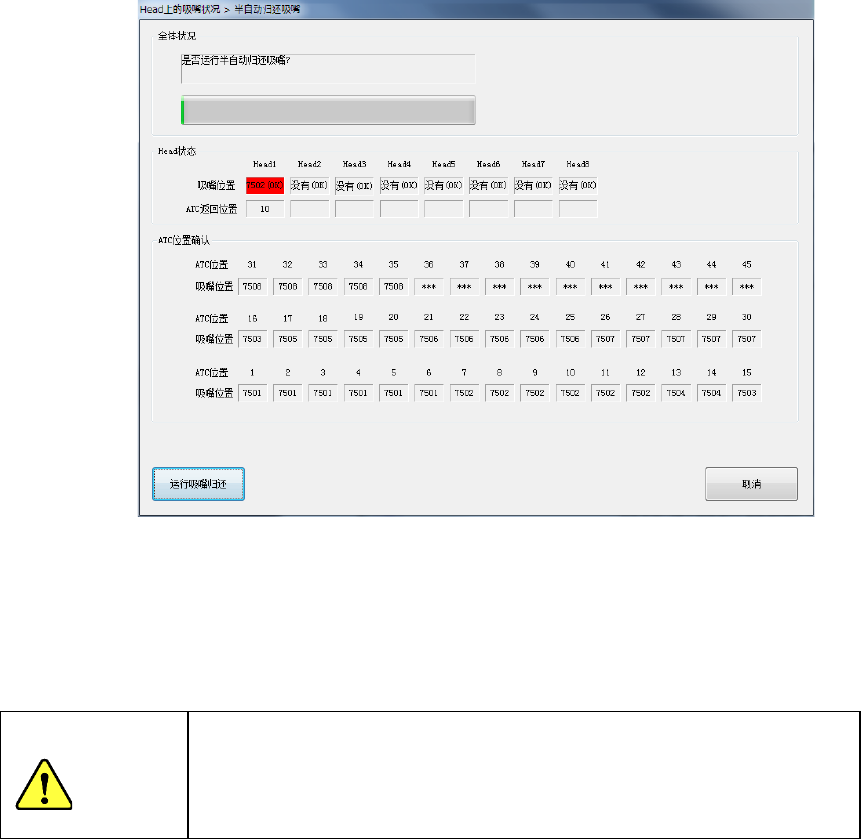
1) 半自动方式
画面上没有激光脏污信息时,可以安全地运行「半自动方式」。
Step1: 在[在 Head 上有无吸嘴状况]画面中,按[半自动归还吸嘴]按钮。
Step2: 显示是否运行的询问画面。
Step3: 此时按[运行吸嘴归还]按钮,则开始运行半自动方式。
操作方法,因是否使用 HMS 而异。
检测 ATC 是否有吸嘴时,若在机器设置中把 HMS 设置为可以使用,则使用 HMS 进行检测。
如在机器设置中将 HMS 设置为了不可使用,则不进行使用 HMS 的吸嘴半自动退还。
单击[运行吸嘴归还]或[确定]后,为了归还吸嘴,轴会移动。
单击以前,请务必确认设备内部没有人在进行作业。
另外,为了防止人身伤害,在机器运行中切勿把手伸入设备内部,脸和
头也不要靠近。
警告
第 1 部 基本篇 第 2 章 生产
2-12
2) 手动方式
Head 有激光脏污时,请进行「手动方式」。
手动取出吸嘴归还时,请务必确认 Head 已经停止后,再进行归还。
手动方式与前面所述相同,是由操作人员将 Head 移动到方便用手取出吸嘴的位置,从 Head
上取下吸嘴归还到 ATC 的方式。
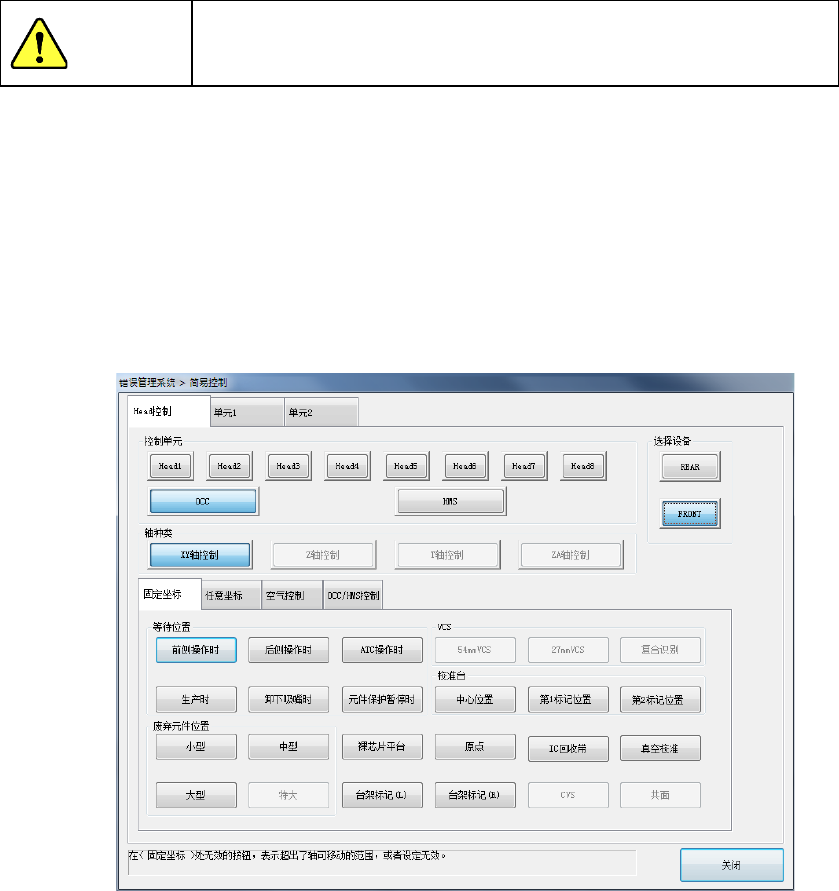
移动 Head 和 ATC 开关,请选择[简易轴控制]按钮进行控制。
「在 Head 上吸嘴有无状况」画面上按[轴简易控制] 按钮后,会显示如下画面。
XY 坐标原点,为操作面板所在的正面左端坐标原点(0,0)。
Z 轴的坐标原点,为基板的高度坐标原点(0),上为「+」、下为「-」。
在「简易控制」画面上,可按[轴移动]选项卡的「XY 轴控制」、「Z 轴控制」,控制轴的动作,
按[单元]选项卡的「ATC 控制」,进行控制 ATC 的开关。
操作的详细说明,请参见「9-7 简易控制」。
注意
第 1 部 基本篇 第 2 章 生产
2-13
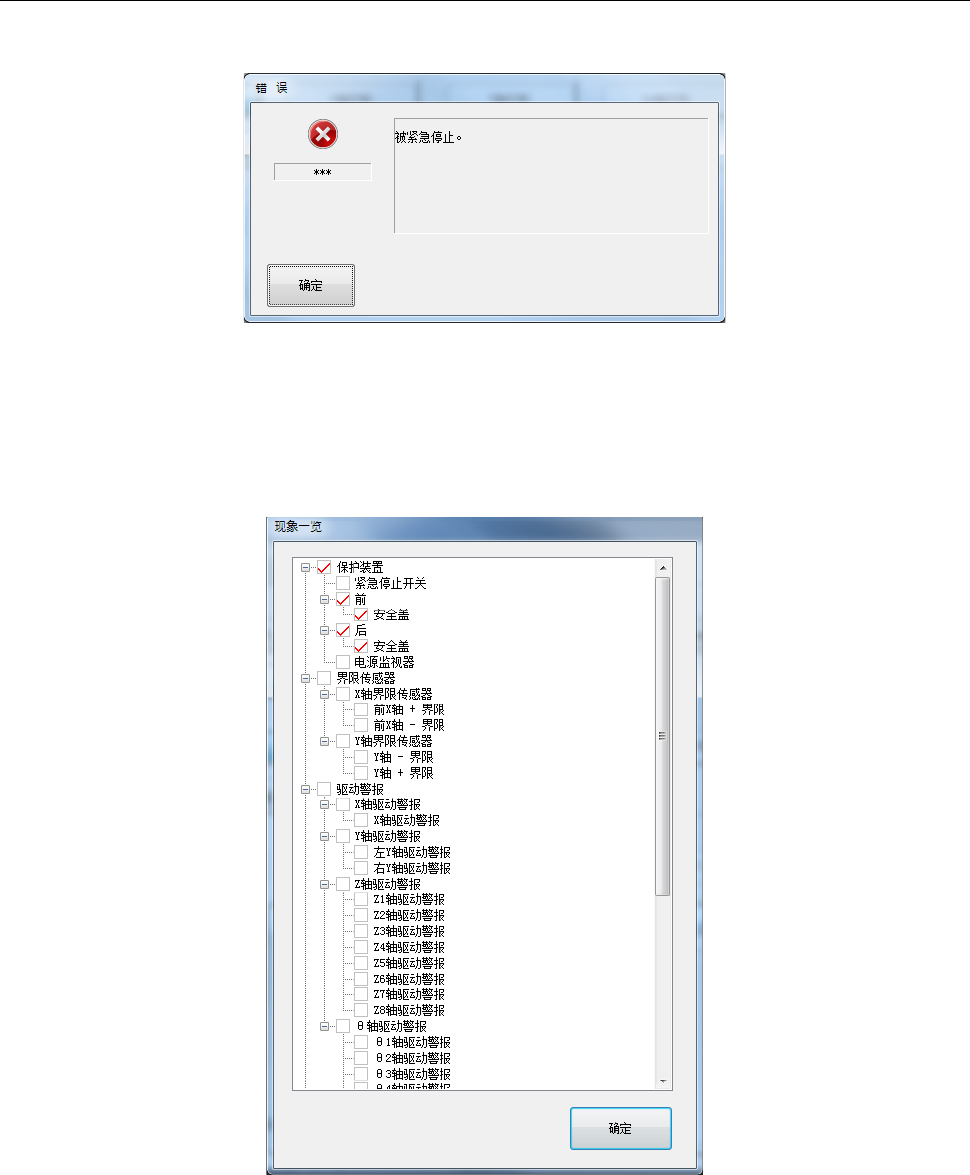
2-3-5 事件画面
打开安全盖(安全罩)、按下紧急停止开关、或检测到各轴的伺服驱动的警报等时,会显示如下画面。
同时发生了多个事件时,画面上显示优先级高的事件错误。
按[显示其他项目]按钮后,将显示所发生的事件的层级结构。
正发生的事件有勾选标记。