RS-1R使用说明书.pdf - 第401页
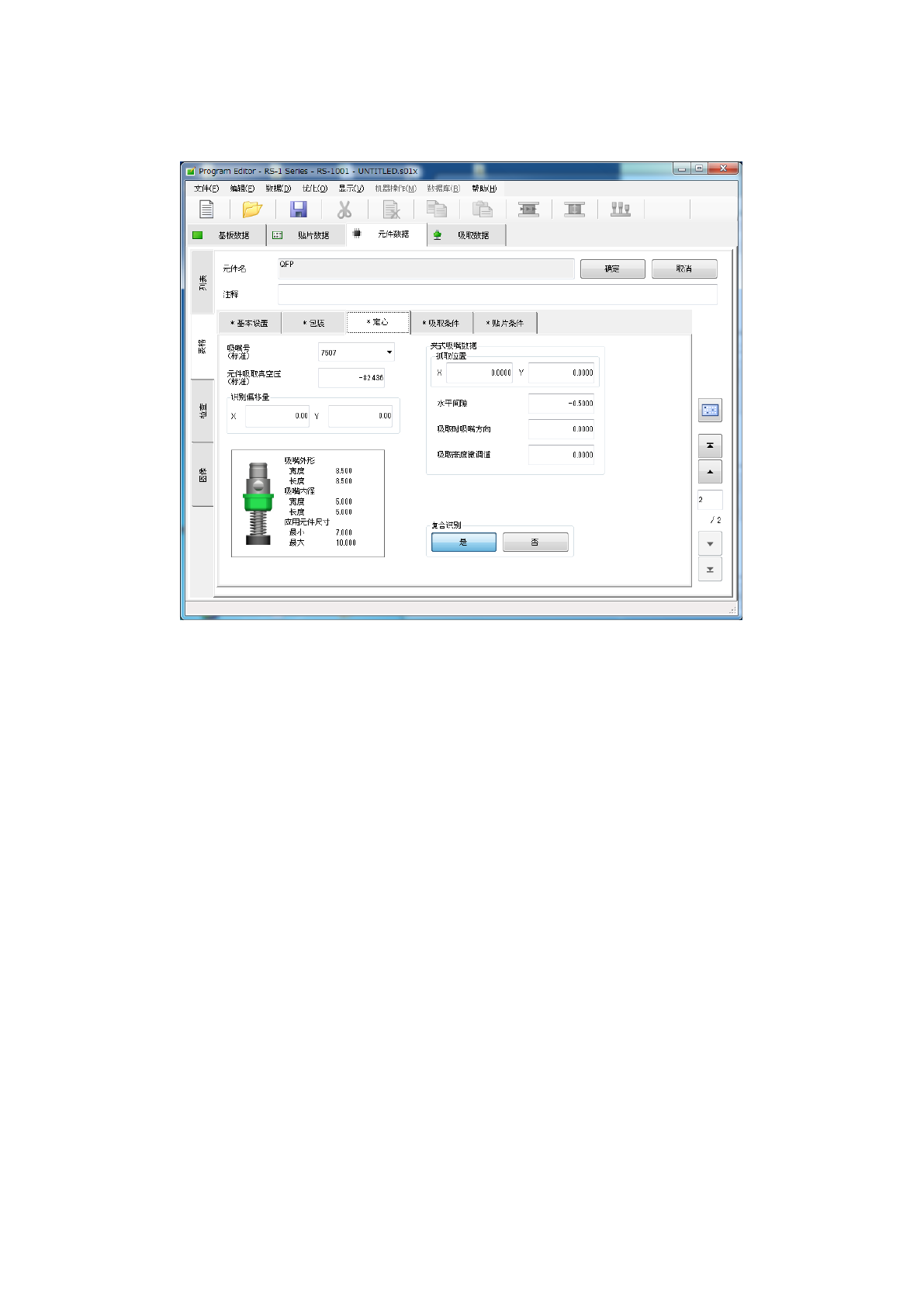
第 1 部 基本篇 第 4 章 制作生产程序 4- 65 2 ) 图像定心时 选择定心选项卡 ,即显示如下 画面 。 ① 吸嘴号 ② 元件吸取真空压 与 「( 1 )激光定心时」的设 置相同 。

第 1 部 基本篇 第4 章 制作生产程序
4-64
⑤ 夹式吸嘴数据
抓取位置 : “Y”项,输入元件中心至夹式吸嘴固定侧手臂抓取面(紧贴面)中心的偏移
值(a),要输入负数。
“X”项只可输入 0,不可输入其他数据。
水平间隙 : 夹式吸嘴固定侧卡头的固定臂面与元件之间的间隙(b),要输入负数。
通常设置为自动输入的默认值。
吸取时吸嘴方向 : 指的是,吸取以 0 度状态供应的元件时的吸嘴方向。
请指定 0 度、90 度、180 度、270 度中的一项。
吸取高度微调值 : 吸取时吸取高度的校正值(c 与元件上表面之间的间隙)。
通常,为了将元件保持水平,设为-0.5mm。
抓取位置(a)
水平间隙(b)
元件
C
固定臂
摇臂
第 1 部 基本篇 第4 章 制作生产程序
4-65
2) 图像定心时
选择定心选项卡,即显示如下画面。
① 吸嘴号
② 元件吸取真空压
与 「( 1)激光定心时」的设置相同。
第 1 部 基本篇 第4 章 制作生产程序
4-66
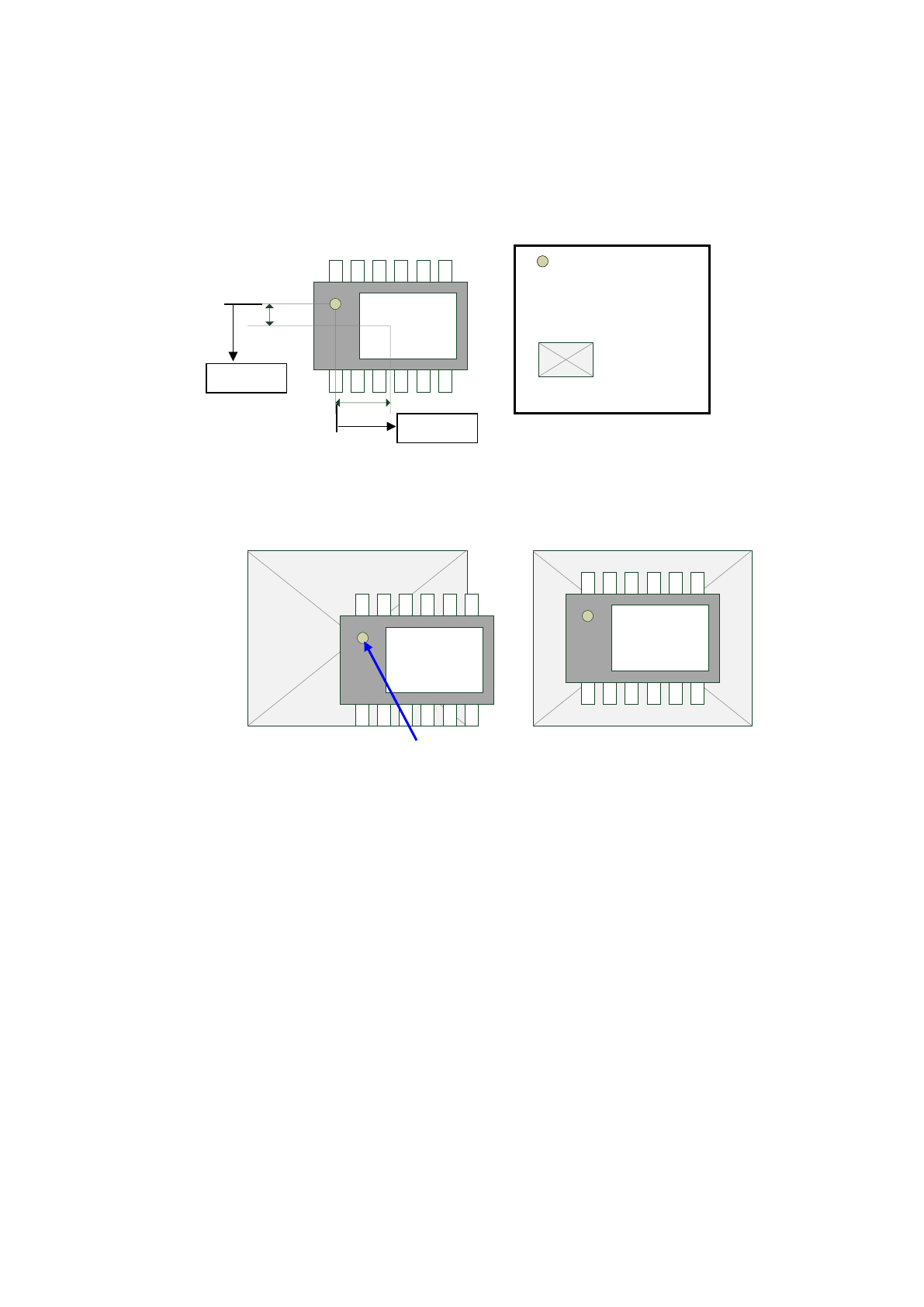
③ 识别中心偏移量
图像定心是通过将吸取中心位置(通常是元件中心位置)移动到 VCS 的中心位置来进行。但像
MCM(Multi Chip Module)之类的元件,因不能吸取元件中心,如果超出 VCS 视野范围时,将不
能进行图像定心。此时,可通过输入下一页示例的偏移值(a、b),使之正常进行识别。
输入示例
识别中心偏移(0,0)时 识别中心偏移(5,-2)时
④ 夹式吸嘴数据
与 「( 1)激光定心时」的设置相同。
⑤ S-VCS
设定是否执行 S-VCS 识别。
+
a
b
:
:吸取中心位置
+ :元件中心位置
(a、b)=(5,-2
)
吸取中心位置=VCS 的中心位置
+
+
-Y 方向
+X 方向
:
VCS 的视野
(俯视图)