RS-1R使用说明书.pdf - 第136页
第 1 部 基本篇 第 2 章 生产 2- 24 <基板传送装置 构造 概要> 传送限动 器的安装位置是, 当 传 送方向 为 左→ 右 时安装在右 侧, 传 送方向 为 右→左 时 安装在左 侧。 使用传送限动器 时 ,下游 (O UT ) 侧 在基板前 端接触到 传送限动 器的位置上基 板被 夹紧。 1) 基板 传入, IN 传感器①检测出基板 时,传送 马达⑩会驱 动驱动轴 ⑪ ,通过传送带开始传送。 并且,限动器 ⑲ 同时变为 …
第 1 部 基本篇 第 2 章 生产
2-23
2-7-1-1 传送部的构成
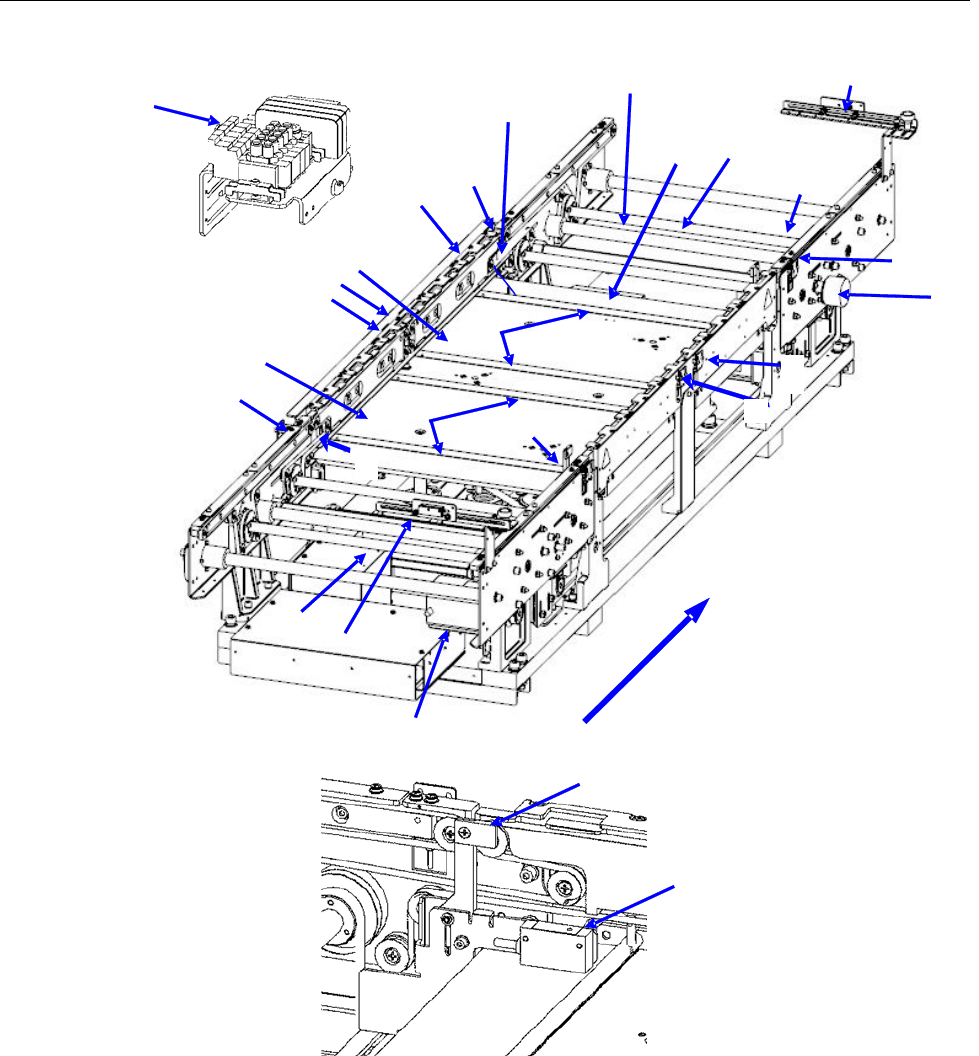
<基板传送装置各部分的名称>
1 IN
传感器
9
传送电磁阀
17
支撑销检出传感器受光
2 OUT
传感器
10
传送马达
18
挡块传感器
3 WAIT
传感器光缆受光
11
驱动轴
19
挡块
4 WAIT
传感器光缆发光
12
侧梁
20 (WAIT2
传感器光缆受光
)
5 C_OUT
传感器光缆受光
13
支撑台
IN
21 (WAIT2
传感器光缆发光
)
6 C_OUT
传感器光缆发光
14
支撑台
OUT
22 (WAIT2
传感器光缆受光
)
7 PWB
导轨
15
自动调整宽度马达
23 (WAIT2
传感器光缆发光
)
8 支撑台原点传感器
16
支撑销检出传感器发光
2
1
15
11
3
4
8
10
11
12
10
13
14
17
16
18
11
7
5
9
12
6
21
2
0
22
23
基板传送方向
18
19
第 1 部 基本篇 第 2 章 生产
2-24
<基板传送装置构造概要>
传送限动器的安装位置是,当传送方向为左→右时安装在右侧,传送方向为右→左时安装在左侧。
使用传送限动器时,下游(OUT)侧在基板前端接触到传送限动器的位置上基板被夹紧。
1) 基板传入,IN 传感器①检测出基板时,传送马达⑩会驱动驱动轴⑪,通过传送带开始传送。
并且,限动器⑲同时变为 ON。
2) 当基板到达限动器⑲时 ,被 STOP 传感器⑱检测到,支承台⑬⑭上升。此时,通过限动器⑲、
支承销将基板的外形进行固定。临时固定完成后,限动器⑲OFF,完成基板固定。
3) 固定后,下一基板相同地运入,在 WAIT 传感器③的位置上待机。
4) 生产结束后解除固定,开始传出。
5) 最早的基板通过 C・OUT 传感器⑤后,限动器⑲再次变为 ON,进行下一基板的固定准备。
第 1 部 基本篇 第 2 章 生产
2-25
2-7-1-2 传送轨道宽度的调整
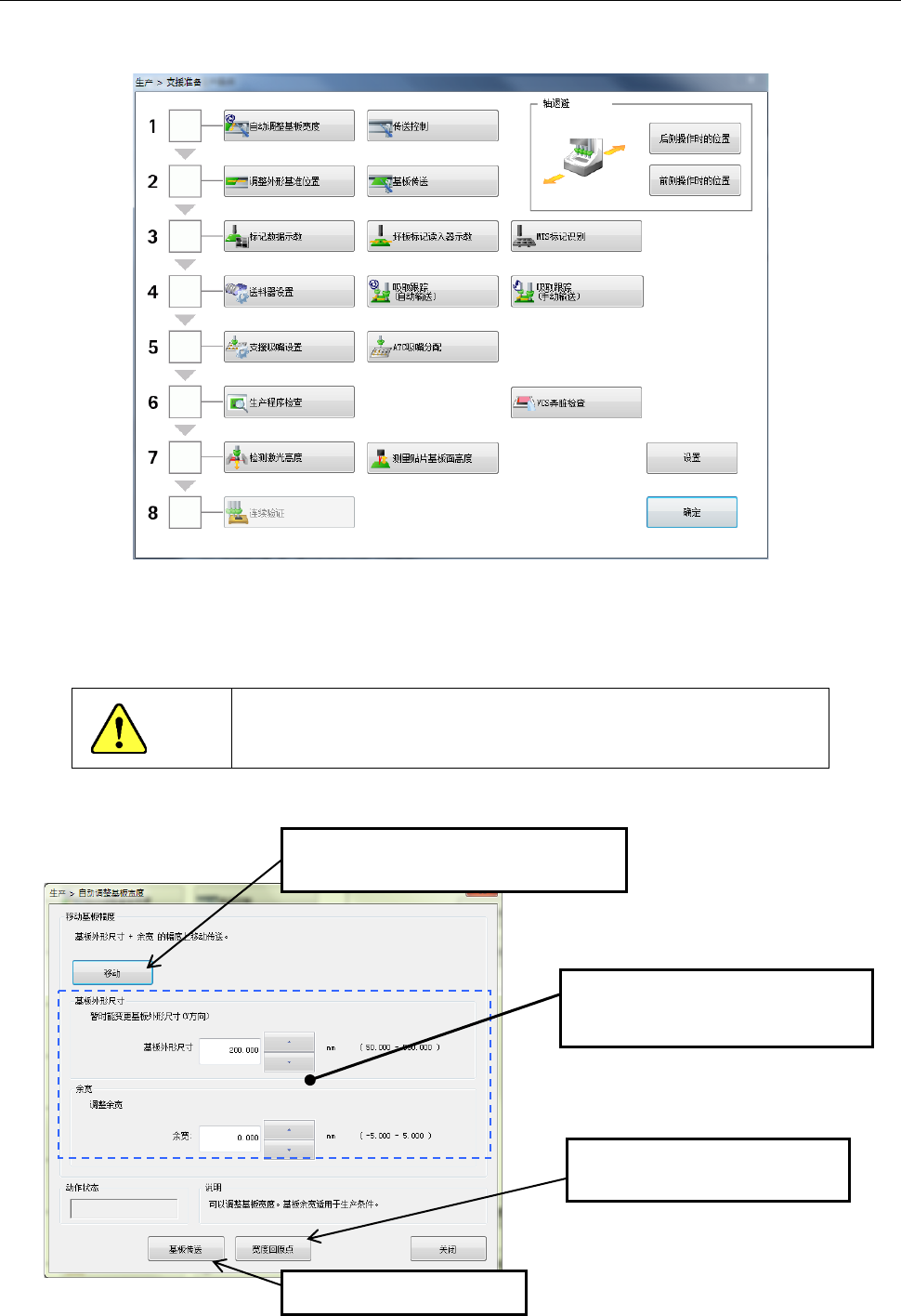
<在「自动调整基板宽度画面」中的调整方法>
(1) 请从生产的菜单选择[生产辅助]-[支援准备]。
(2) 请对准传送宽度尺寸。
按下画面的 1「自动调整基板宽度」,即可显示「自动调整基板宽度」画面。
「自动基板宽度调整」在单通道、双通道下,有不同的操作。
注意
按照以下说明点击[移动]按钮后,传送即随之启动。
点击之前,务必确认传送活动区域没有妨碍物体。
1) 自动基板宽度调整
③选择[移动],调整宽度。马达旋转,
执行调整。
① 选择[宽度回原点],
执行传送的返回原点。
②
输入
[
尺寸
]
、
[
余宽
]
。
([余宽]宽度不适合基板传送宽度时,
请输入。大致为-
0.5mm
〜
0.5mm
。)
④ 请检查传送是否顺畅。