RS-1R使用说明书.pdf - 第426页
第 1 部 基本篇 第 4 章 制作生产程序 4- 90 < 引脚识别图 案的含义及图形 > ● 两端引脚除外:以指定的 两端引脚根数以 外的引脚为识别 对象 ※请在引脚数 里输入作为识 别对象的 引脚数。 (不包括 被除外的引脚 数) 2) 元件类型 球元件时 ※ 制作球元件的图像数据时 ,要按元件的仰 视图制作数据。 请按仰视图看到 的球的各种信息 进行设置。 俯视图 仰视图 ① 球间距 输入球之间的尺 寸(X、Y) 。…
第 1 部 基本篇 第4 章 制作生产程序
4-89
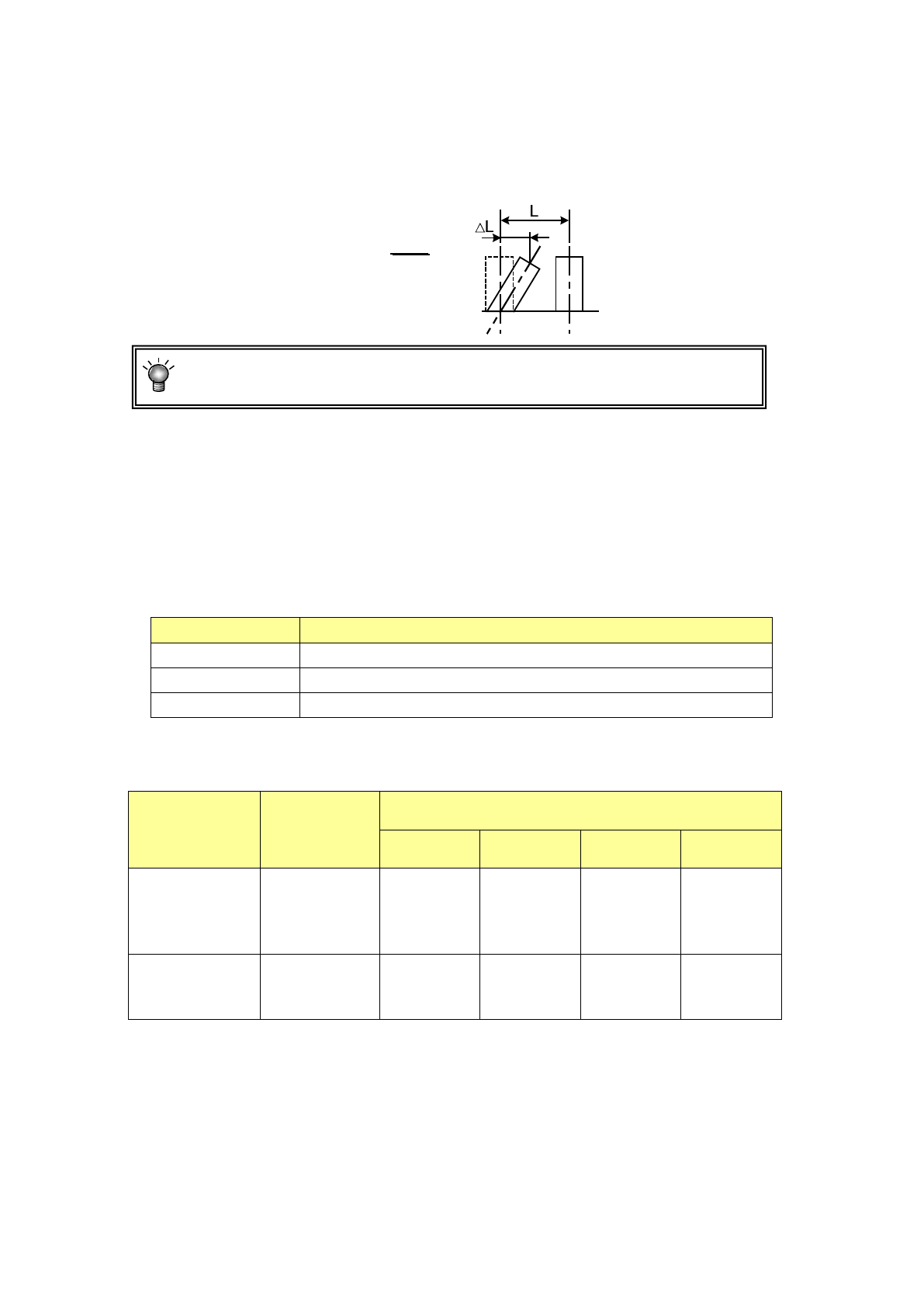
e) 弯曲度
为了检查引脚水平方向的弯曲,设置检测水平值。
该值是相对于引脚间距的引脚弯曲率。通常请设置为20%~30%。
若缩小判定值,检查将变得严格。
引脚弯曲检测水平
引脚的垂直方向检查(引脚悬浮检查),要使用选项的共面功能。
③ 引脚方向
元件种类为单向引脚连接器时,设置有引脚的面是上还是下。
④ 识别引脚种类
对连接器元件,通常需要识别所有引脚,如只能识别两端的引脚,或两端有引脚以外的发光物时,
只能分别按仅对两端引脚进行识别,或把发光物体假定为引脚,仅将两端引脚除外进行识别。
项目
内容
所有引脚 将所有引脚作为识别对象。
仅对两端引脚 从引脚两端开始指定识别引脚的范围。
两端引脚除外 从引脚两端开始指定不识别引脚的范围。
指定为“仅识别两端引脚”、“两端引脚除外”时,要输入左上、右上、左下、右下的引脚根数,
指定识别范围。
元件种类
识别图案
引脚数输入范围
左上角
右上角
左下角
右下角
单向连接器
所有引脚
仅两端引脚
两端引脚除外
****
1-3
0-3
****
1-3
0-3
****
****
****
****
****
****
双向连接器
Z 引脚连接器
所有引脚
仅两端引脚
两端引脚除外
****
1-3
0-3
****
1-3
0-3
****
1-3
0-3
****
1-3
0-3
※引脚数在 2 根以下时,有时识别精度会降低。
ΔL
L
第 1 部 基本篇 第4 章 制作生产程序
4-90
<引脚识别图案的含义及图形>
● 两端引脚除外:以指定的两端引脚根数以外的引脚为识别对象
※请在引脚数里输入作为识别对象的引脚数。(不包括被除外的引脚数)
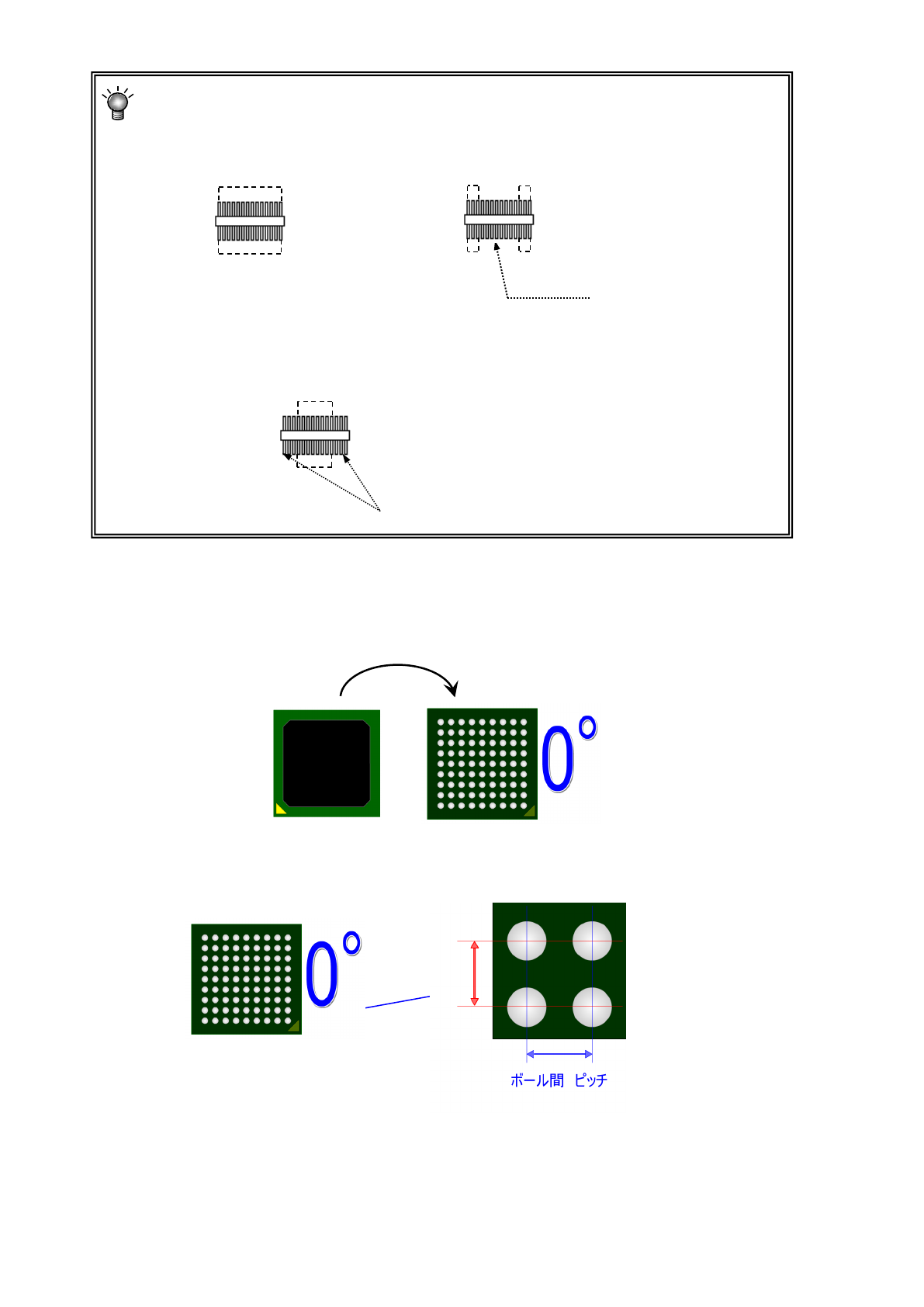
2) 元件类型 球元件时
※ 制作球元件的图像数据时,要按元件的仰视图制作数据。
请按仰视图看到的球的各种信息进行设置。
俯视图 仰视图
① 球间距
输入球之间的尺寸(X、Y)。
Y
● 仅两端引脚:只识别指定的两端引脚根数 ● 识别所有引脚:所有引脚为识别对象
识别
识别
不识别内侧引脚
识别 识别
识别 识别
球之间的间距
X
球间距
不识别外侧引脚
识别
识别
第 1 部 基本篇 第4 章 制作生产程序
4-91
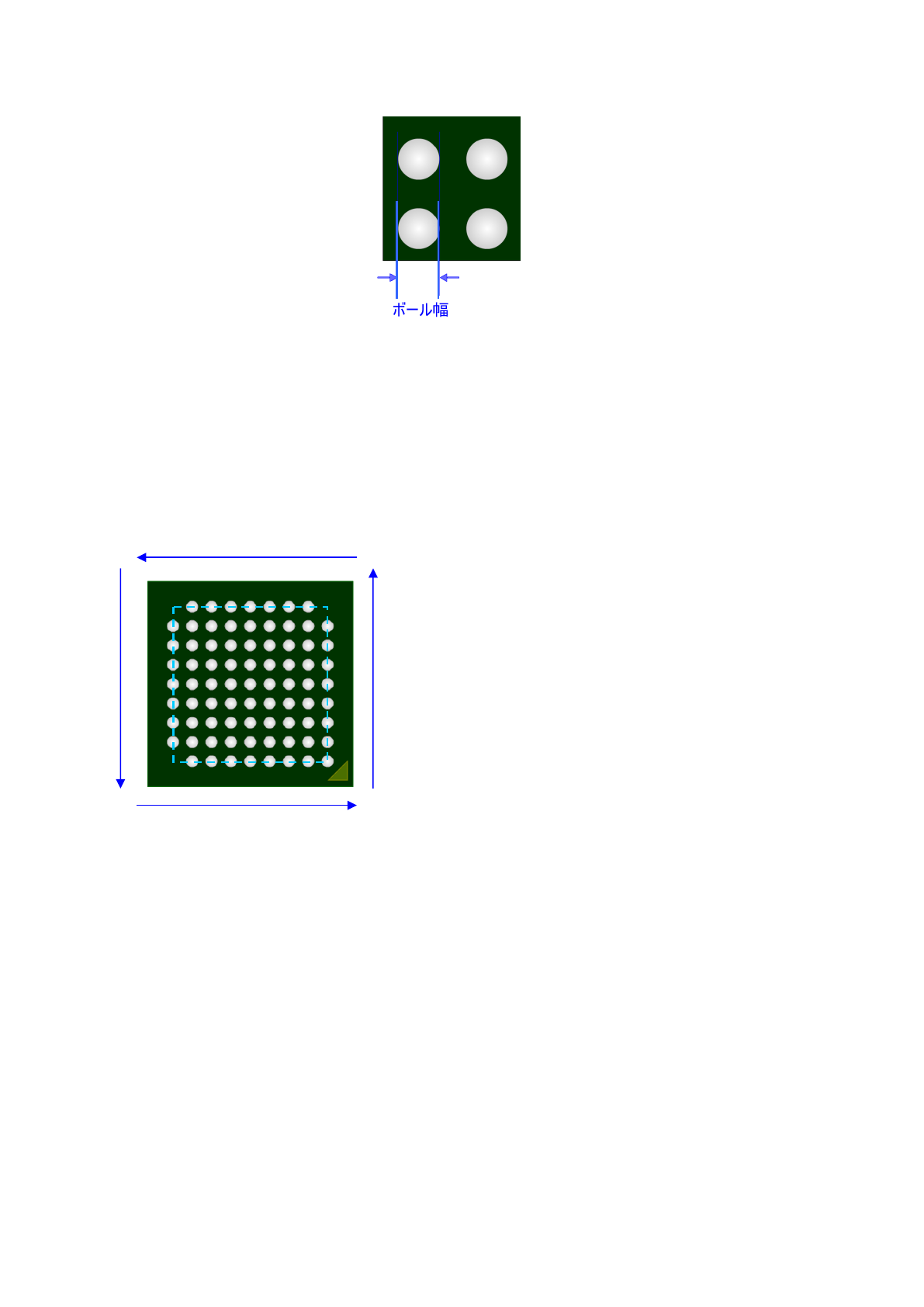
② 球信息
a) 宽度
输入球的宽度(直径)。
b) 数
(下、右、上、左)
输入相对各个边外围的球数。
即使外围有欠缺的球时,也请输入假定无欠缺状态时的数目。
c) 开始/缺少
(下、右、上、左)
如果各边的外围的球有缺少时,要输入欠缺的信息。
缺少信息可分别在 4 个边上设置,1 个方向最多可设置 3 处。
数 开始 1 缺少 1 开始 2 缺少 2
(引脚)(忽略始1)(忽略数1)(忽略始2)(忽略数2)
下 9 1 1 0 0
右 9 0 0 9 1
上 9 1 1 9 1
左 9 1 1 9 1
1
1
1
1
球宽度
球径