RS-1R使用说明书.pdf - 第809页
第 2 部 功能详解篇 第 9 章 手动控制 9- 36 9-6-5- 1 传感器信息 在驱动器 状 况 对话框,按 [ 传感器 信息 ] 按钮 ,即可显示传 感器信息对话 框 。 原点 传感器及界限 传感器 状况用 ON/OFF , 热敏电阻 器温度 的信息 用各自 数值显示。 9-6-5- 2 轴反馈位置信息 在 驱动器 状 况 对话框 里,按下 [ 轴反馈 位置信息 ] 按钮 ,即可 显示轴 反馈位置信息 。
第 2 部 功能详解篇 第 9 章 手动控制
9-35
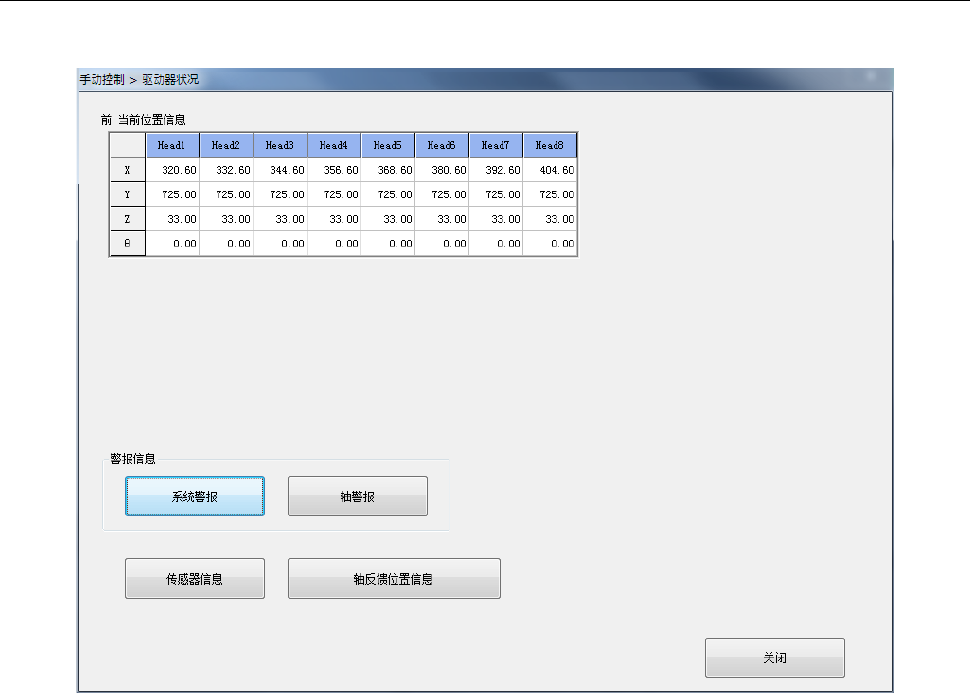
9-6-5 驱动器状况
选择菜单的[其他]-[驱动器状况],即可显示驱动器状况。
(1) 当前位置信息
显示各轴当前位置坐标及旋转角度。
对机器设置[使用单元]里的设定,没有影响。没有勾选(不使用的)单元的状态也会显示。
(2) 传感器信息
按下[传感器信息]按钮,即可显示传感器信息。详细情况后述。
(3) 轴反馈位置信息
按下[轴反馈位置信息]按钮,即可显示轴反馈位置信息。详细情况后述。
第 2 部 功能详解篇 第 9 章 手动控制
9-36
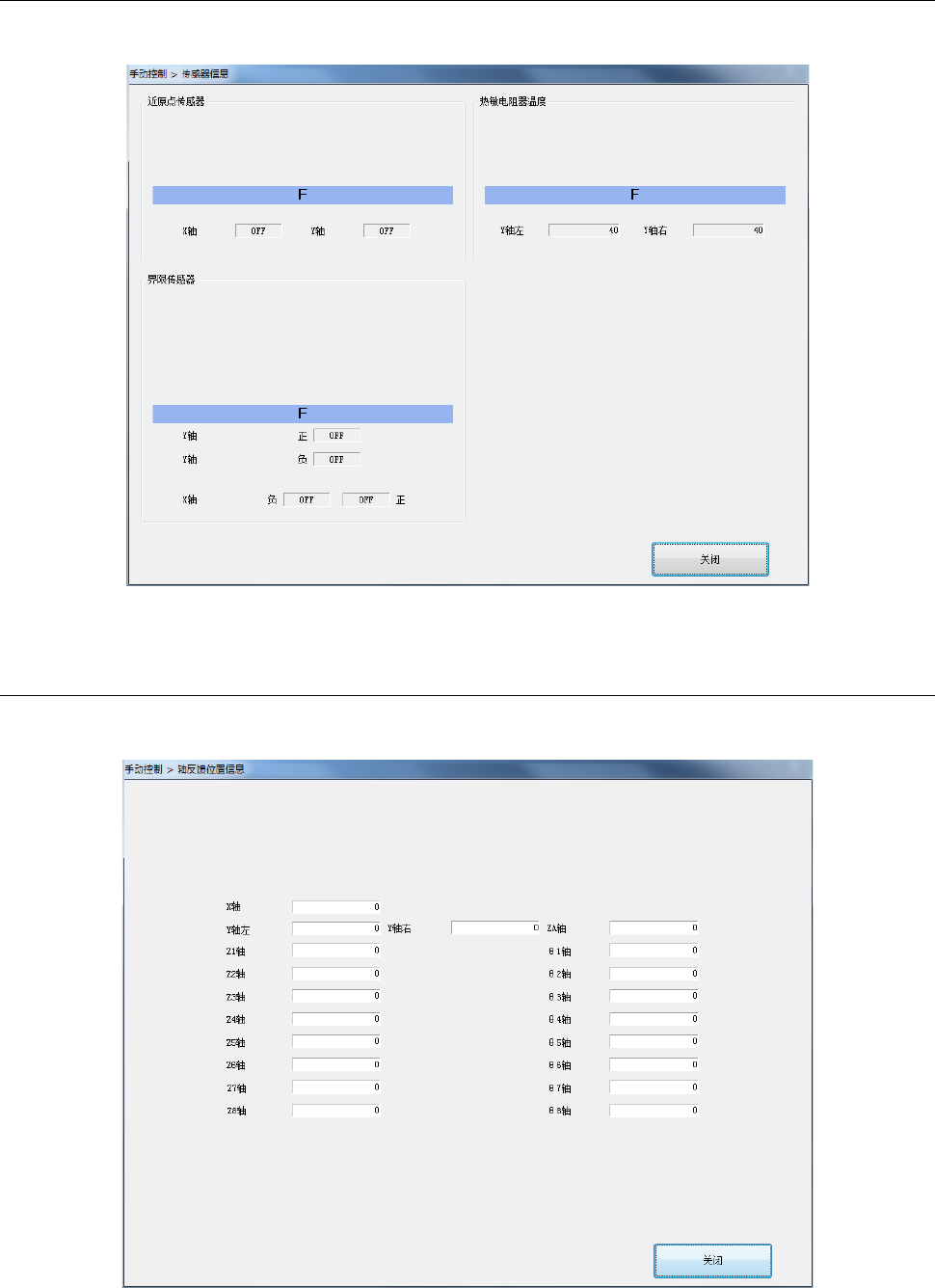
9-6-5-1 传感器信息
在驱动器状况对话框,按[传感器信息]按钮,即可显示传感器信息对话框。
原点传感器及界限传感器状况用 ON/OFF,热敏电阻器温度的信息用各自数值显示。
9-6-5-2 轴反馈位置信息
在驱动器状况对话框里,按下[轴反馈位置信息]按钮,即可显示轴反馈位置信息。
第 2 部 功能详解篇 第 9 章 手动控制
9-37
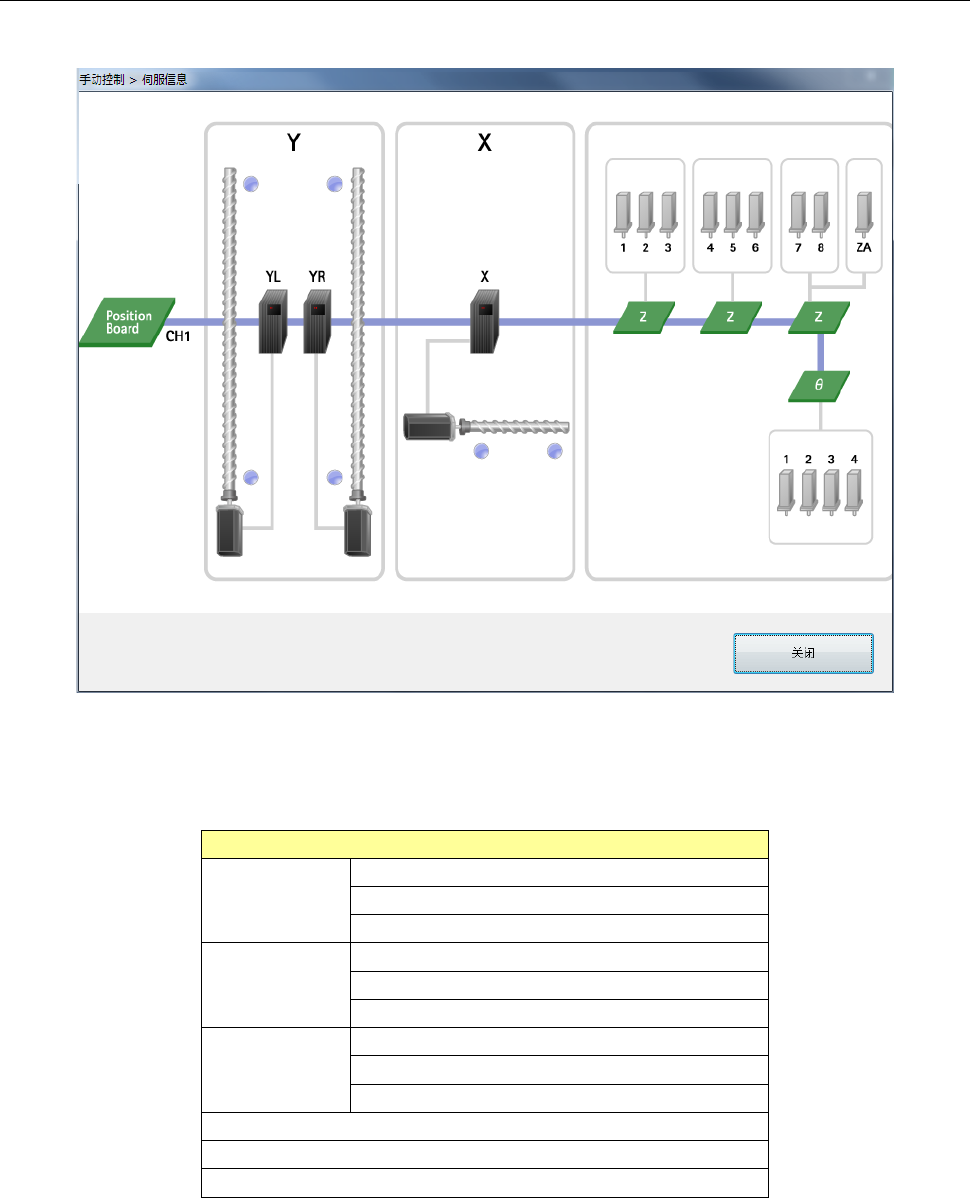
9-6-6 伺服状态
选择菜单的[其他]-[伺服状态],即可显示伺服状态对话框。
(1) 伺服状态
显示伺服当前的状态。出现错误的单元显示为红色。
将光标移动到单元或各传感器的图标上,可显示工具信息提示。
单元
Y 轴右
放大器
马达
界限传感器
正
/
负
Y 轴左
放大器
马达
界限传感器
正
/
负
X 轴
放大器
马达
界限传感器
正
/
负
θ1
~
θ4
Z1
~
Z8
、
ZA
位置板