RS-1R使用说明书.pdf - 第520页
第 1 部 基本篇 第 4 章 制作生产程序 4- 184 (3) 过 He ad 设备示教 通过 H ead 设备 示教, XY 轴、 Z 轴、 θ 轴要分别进行 。 1) 择设备 切换示教 使用的设备 。 2) 择 Head 吸嘴 指定示教时使用 的 H ead 吸嘴。 3) 动轴 变更要移动的轴 。 4) 置照明值 贴装头示教不能 设置此项。 5) 送间隔 要变更电动送料 器的输送间隔时 设置。
第 1 部 基本篇 第4 章 制作生产程序
4-183
使用
HMS
进行示教时,因被测量元件的表面
(
测量面
)
状况
(
光泽、表面粗糙程度
),
有时会
导致激光散射,从而无法测量。
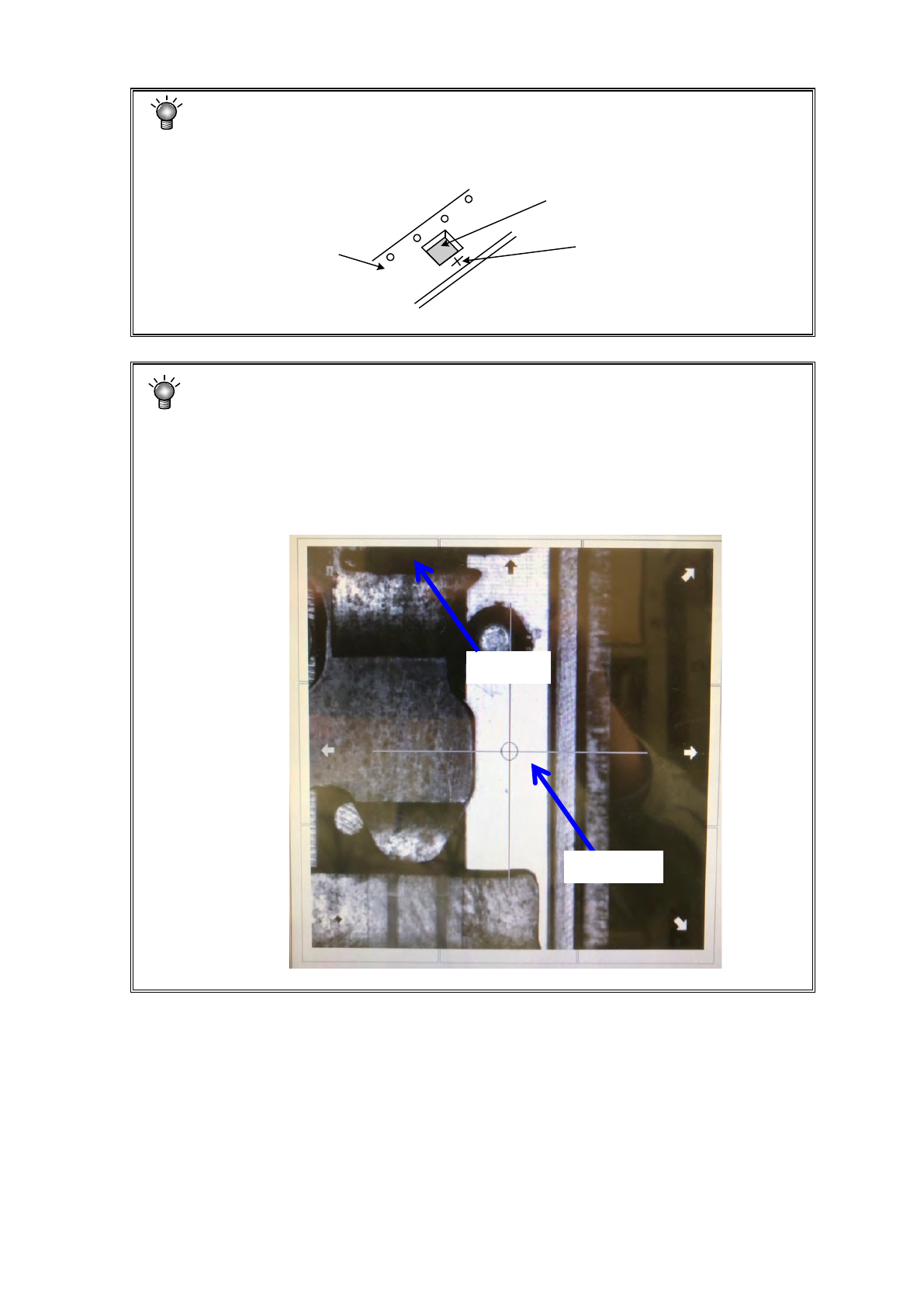
此时,请参见下图,将激光移动到带料托架上,以该点代用,进行 Z 轴的示教。
使用
HMS
实施供料器
RF04AS
的示教时,若测定面上的带子为透明或者半透明,激光将
透过而无法获得正确的测定值,有时会造成吸取率恶化。
此时,请将激光移动至下图所示的供料器带子铺设面上,执行该点的 Z 轴示教。进而测
定载带的厚度(护带除外),请在元件数据、吸取条件的吸取押入量中,按照以下所示输
入数值。
(例如: 带子厚度为 0.3mm 时,0.05-0.3 =-0.25mm)
请将该值作为初始值,根据需要对吸取押入量进行微调。
吸取位置
带子铺设面
带料托架
元件
测定点
第 1 部 基本篇 第4 章 制作生产程序
4-184
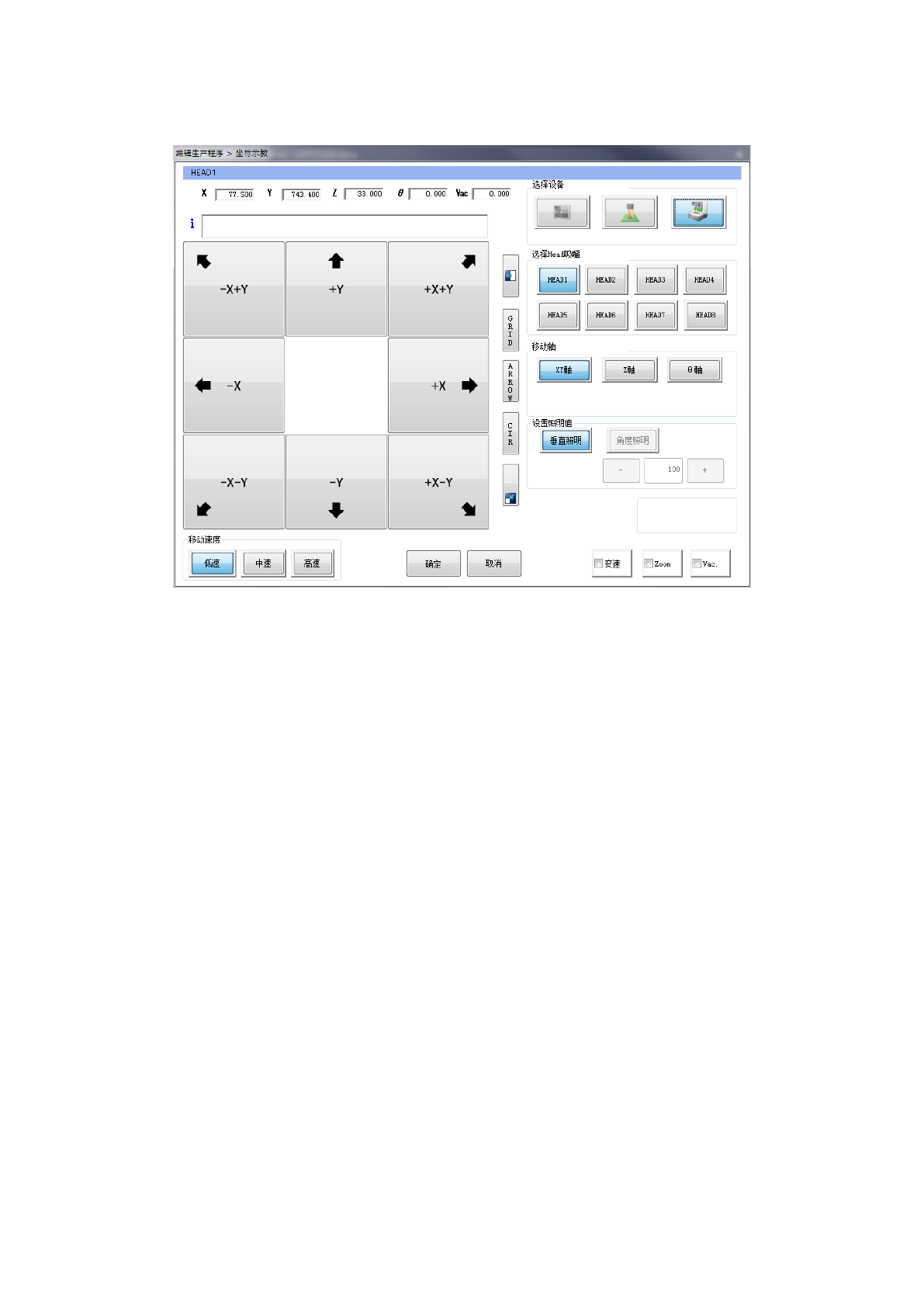
(3) 过 Head 设备示教
通过 Head 设备示教,XY 轴、Z 轴、
θ
轴要分别进行。
1) 择设备
切换示教使用的设备。
2) 择 Head 吸嘴
指定示教时使用的 Head 吸嘴。
3) 动轴
变更要移动的轴。
4) 置照明值
贴装头示教不能设置此项。
5) 送间隔
要变更电动送料器的输送间隔时设置。
第 1 部 基本篇 第4 章 制作生产程序
4-185
6) 动速度
与通过摄像机示教相同。
以上图像为选择 XY 轴时的状况。选择其他轴时,请参见下页以后的内容。
在移动轴中选择 XY 轴的状态下,按画面左侧的 8 方向箭头按钮时 Head 即进行 XY 移动,在触摸过
程中,轴会持续移动。
当前的 Head 坐标会显示在画面上部。
注意
为了避免人身伤害,在示教操作过程中,切勿将手放入装置内部,也不要将脸
和头靠近装置。
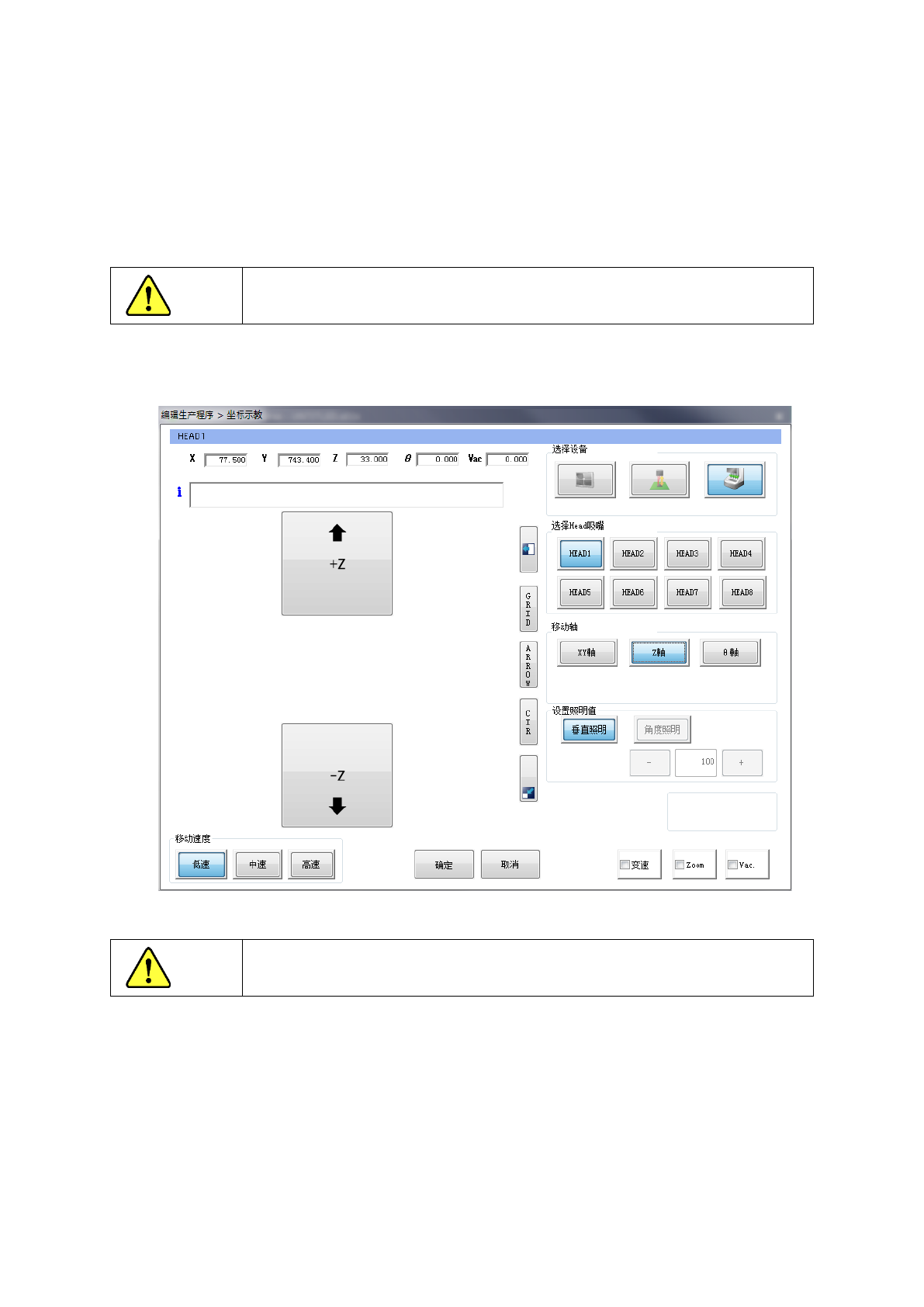
移动轴中选择 Z 轴的状态下,按画面左侧的上下方向箭头按钮,Head 即进行 Z 移动。
务必确认吸嘴下面没有干扰的东西,在安全的前提下再移动。
注意
为了避免人身伤害,在示教操作过程中,切勿将手放入装置内部,也不要将脸
和头靠近装置。