RS-1R使用说明书.pdf - 第787页
第 2 部 功能详解篇 第 9 章 手动控制 9- 14 9- 4 传送系 9-4- 1 传送控制 从下拉菜单中选择 [ 传送系 (C) ]-[ 传送控制 (V) ] 、或点击 命令按钮中的 [ 传送控制 ] 后,可显示传送控 制画 面。 选择菜单的 [ 传 送系 ] → [ 传送控制 ] 后,即显示 传送控制的对话框 。 在画面上部显示 各传送 传感器·传送马 达 的 状态 。 IN 侧 的传送挡块及 挡块传感器在 选项挡块生效 时会…
第 2 部 功能详解篇 第 9 章 手动控制
9-13
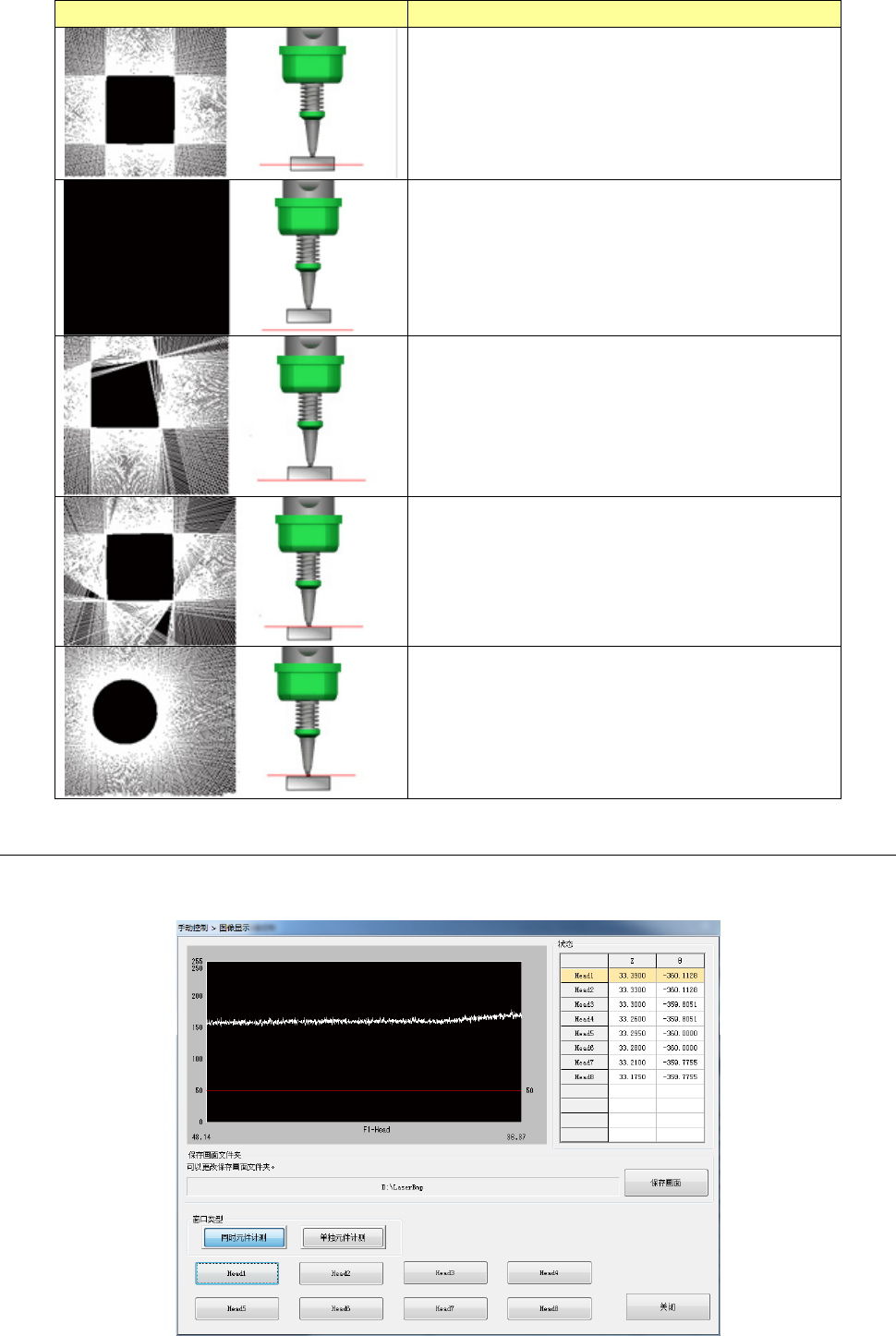
变幻线及激光高度
说 明
激光高度适当。取得的元件形状正确。
取得形状后,激光传感器返回 SWEEP
识别结果。
激光面上没有元件,因一个边缘数据也得不到,
无法描绘变幻线,画面呈黑色。
激光传感器 SWEEP 失败,返回信息为无元件错
误。
激光高度在元件下面附近时,不能全面遮盖激光
面,有些边缘数据没有取得,所以变幻线形状变
形,激光传感器 SWEEP 识别失败,返回错误信
息。
激光高度在元件上面和吸嘴边缘时,同上面情况
一样,有的地方激光面遮盖不全,出现 SWEEP
失败。
激光高度只达到吸嘴尖端而未达到元件时,变幻
线显示出吸嘴尖端的形状。
9-3-3-7 控制项目:图像显示
显示所选 Head 的激光传感器的图像数据。
选择控制项目的[图像显示]时,按[执行]按钮进行控制。
第 2 部 功能详解篇 第 9 章 手动控制
9-14
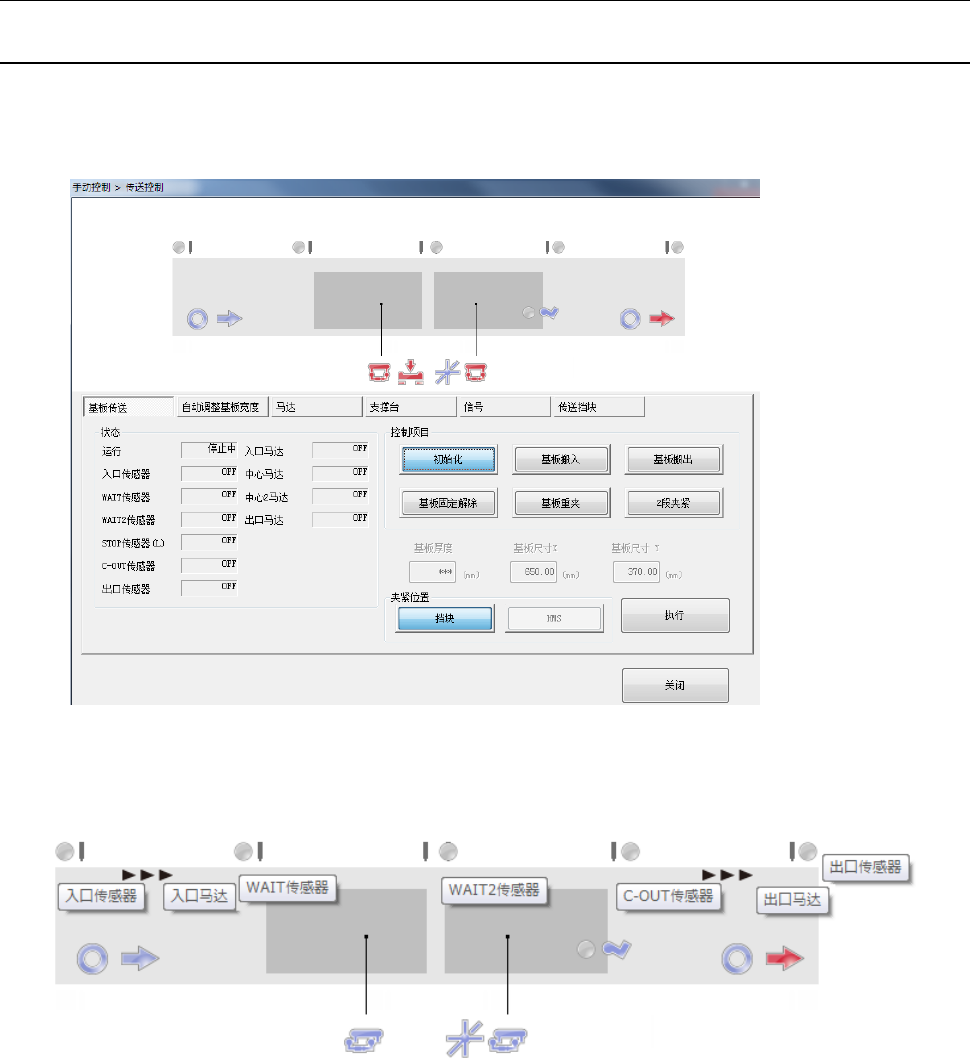
9-4 传送系
9-4-1 传送控制
从下拉菜单中选择[传送系(C)]-[传送控制(V)]、或点击命令按钮中的[传送控制]后,可显示传送控制画
面。
选择菜单的[传送系]→[传送控制]后,即显示传送控制的对话框。
在画面上部显示各传送传感器·传送马达的状态。
IN 侧的传送挡块及挡块传感器在选项挡块生效时会显示。
把光标对准传感器显示图上时,即可显示工具提示。上图显示的是各停止传感器,马达传感器有关情
况。
各传感器的显示图,请参见如下列表。
第 2 部 功能详解篇 第 9 章 手动控制
9-15
用画面中央的按下式按钮,可选择控制对象。
后面将详细说明。参见 9-4-1-1 控制对象:基板传送以后的章节。
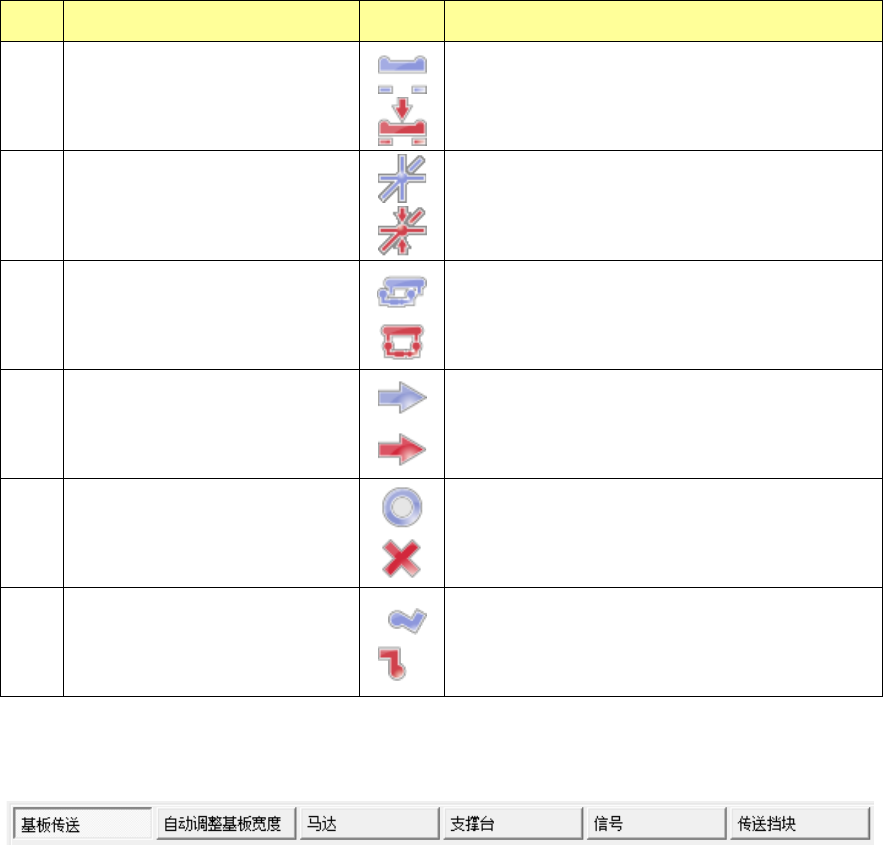
No.
显示项目
显示图
显示内容
1
支撑台挡块
支撑台挡块处于
OFF
状态。
支撑台挡块处于 ON 状态。
2
支撑台原点传感器
支撑台原点传感器处于
OFF
状态。
支撑台原点传感器处于 ON 状态。
3
IN
缓冲选择器・
OUT 缓冲选择器
IN/OUT
缓冲选择器处于
OFF
状态。
IN/OUT 缓冲选择器处于 ON 状态。
4
准备搬入(
Ready In
)
准备搬出(Ready Out)
Ready In/ Out
处于
OFF
状态。
Ready In/ Out 处于 ON 状态。
5
可以搬入基板
(Board available In)·
可以搬出基板
(Board available Out)
Board
available In/Out
处于
OFF
状态。
Board available In/Out 处于 ON 状态。
6
传送挡块
传送挡块处于
OFF
状态。
传送挡块处于 ON 状态。