JM-50使用说明书.pdf - 第390页
第 1 部 基本篇 第 4 章 制作生产程序 4- 90 ◆ 方向判别的正方向 、 反方向 以元件供给 角 度( 参照 ” 4-3-5- 2- 2 包装形式 (1) ※ JUK I 的 元件 供给 角度定义 ”) 为基准, 执行 元 件供给方向判别 。 ・ 为引线判别时: 元件供给 角度 为 90° 时,将引线 ( 管脚 )位于封装中心左 侧的元件 作为 正方向 操作。 0 ° 90 ° 180 ° 270 ° ・ 为封装判别时: 元件…
第 1 部 基本篇 第 4 章 制作生产程序
4-89
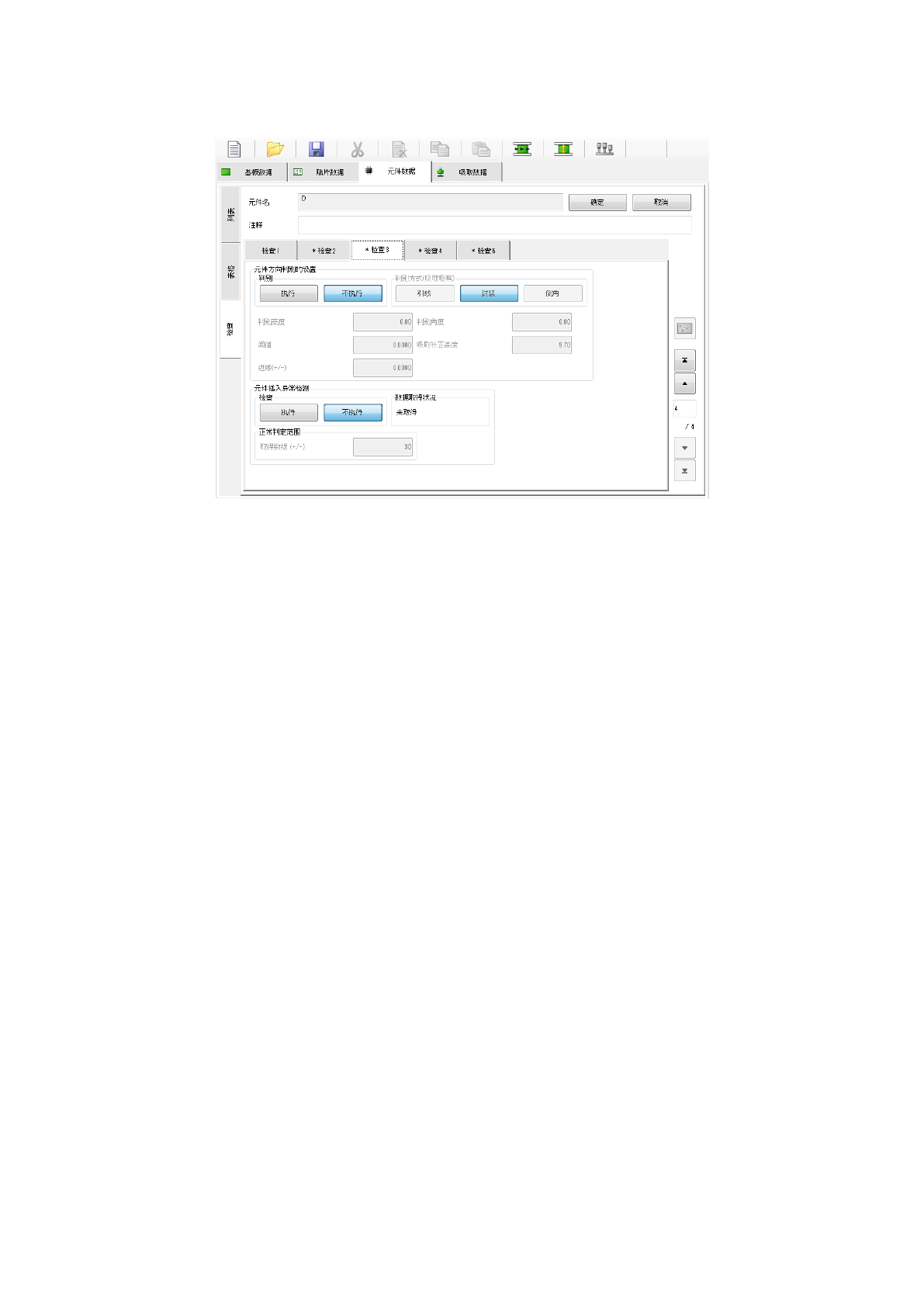
(8) 检查 3
对“元件方向判别的设置”、“ 元件插入异常检测”进行设定。
1) 元件方向判别的设置
可以对每个元件设置元件方向判别的功能。
使用的吸嘴类型(吸取吸嘴/夹式吸嘴)不同,识别方法也有所不同。
可以选择判别(执行/不自信)、 判 别 方 式( 引线(管脚)/封装/倒角)、 阈值、边缘、判别高度、
判别角度、吸取补正高度(仅吸取吸嘴)。
・判别
可以对执行/不执行元件方向判别功能进行选择。
・判别方式(吸取吸嘴)
引线: 在定心页面的激光高度下旋转贴片头并进行识别,之后在元件方向判别设置的吸
取补正高度下使贴片头旋转,执行吸取位置补正后执行方向判别。
有关激光高度,请参照「4-3-5-2 (3) 定心」。
封装: 在元件方向判别设置的吸取补正高度下旋转贴片头并进行识别,之后在判别高度
下旋转贴片头进行识别,执行方向判别。
倒角: 在元件方向判别设置的判别高度下旋转贴片头并进行识别,之后在判别角度下旋
转贴片头,在贴片头静止状态下进行识别后执行方向判别。
・判别方式(夹式吸嘴)
引线: 在定心页面的激光高度下旋转贴片头并进行识别,执行方向判别。有关激光高度,
请参照「4-3-5-2 (3) 定心」。
封装: 元件方向判别设置的判别高度下旋转贴片头并进行识别,执行方向判别。
倒角: 在元件方向判别设置的判别高度下旋转贴片头并进行识别,之后在判别角度下旋
转贴片头,在贴片头静止状态下进行识别后执行方向判别。
第 1 部 基本篇 第 4 章 制作生产程序
4-90
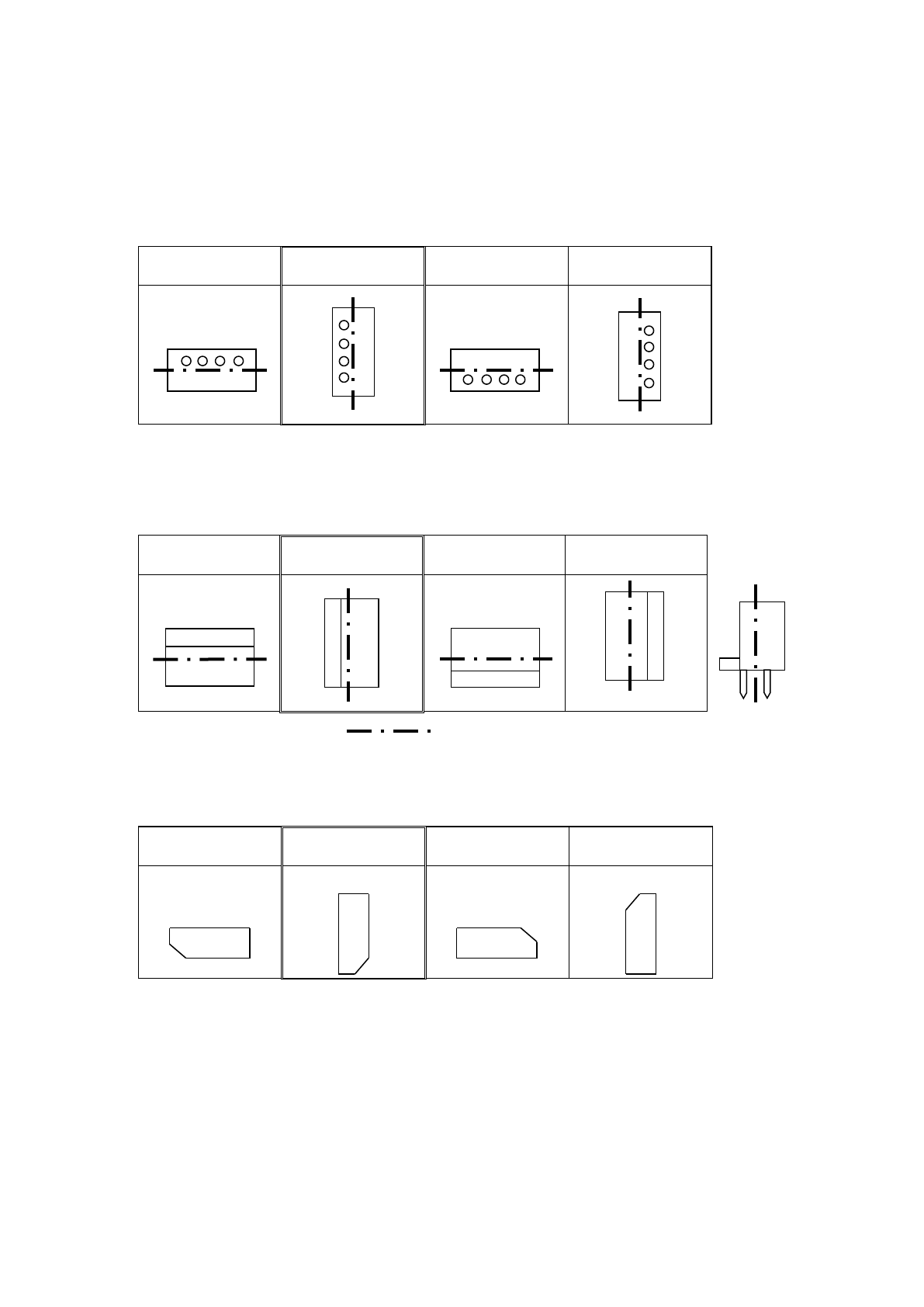
◆ 方向判别的正方向、反方向
以元件供给角度(参照 ”4-3-5-2-2 包装形式(1) ※JUKI 的元件供给角度定义”) 为基准,执行元
件供给方向判别。
・ 为引线判别时:
元件供给角度为 90°时,将引线(管脚)位于封装中心左侧的元件作为正方向操作。
0°
90°
180°
270°
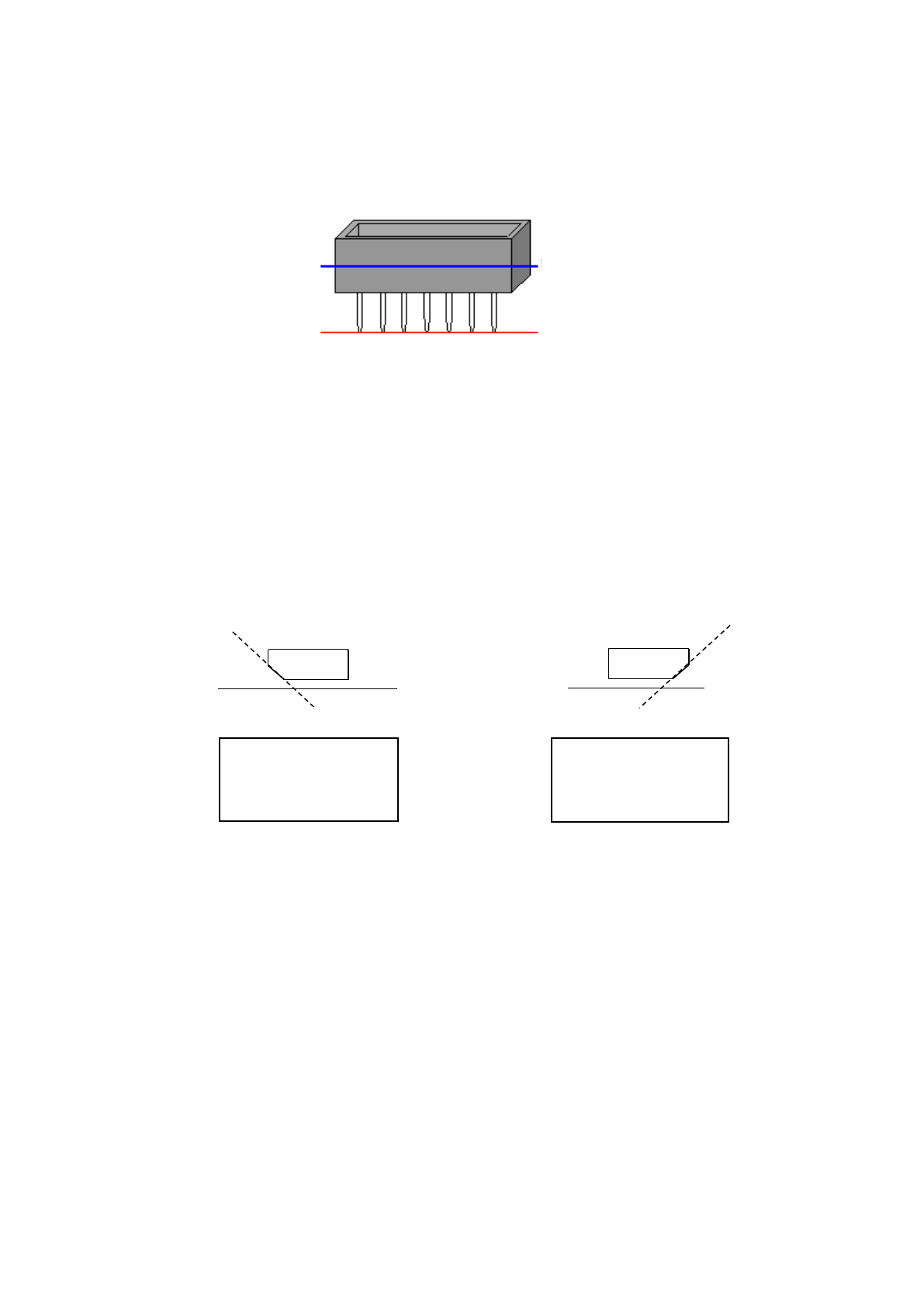
・ 为封装判别时:
元件供给角度为 90°时,将封装凸起部位于中心左侧的元件作为正方向操作。( 与管脚的位置
无关)
0°
90°
180°
270°
侧面图
封装中心(含凸起部) :
・ 为倒角判别时:
元件供给角度为 90°时,将纵长的缺角部位于下方时作为正方向。
0°
90°
180°
270°
第 1 部 基本篇 第 4 章 制作生产程序
4-91
・ 阈值、边缘的设定
对阈值和边缘的设定,在实施方向判别检查后输入最佳值。
・ 判别高度
为封装识别、倒角识别时的元件高度值。元件最下面为 0,元件上部为+值。
・ 判别角度
为倒角识别时的元件角度值。
在所输入的角度下旋转贴片头执行方向判别。
在判别角度下输入倒角倾斜的角度。
<判别角度输入例>
无论供给角度,以「
元件数据定义的姿势」为基准,倒角在左下侧的元件,在判断角度处输入-
值的倾角。倒角在右下侧的元件,在判断角度处输入+值倾角。
倒角在左下侧,所以
判断角度输入-45 度
倒角在右下侧,所以
判断角度输入+45 度
45
度
45 度
判别高度 5.00
判别高度 0.00