JM-50使用说明书.pdf - 第749页
第 2 部 功能详解篇 第 10 章 自己诊断功能 10 - 24 (4) 设置 H ead 的 移动 将设置的 Hea d 移动至 设置 的 3D 传感器识别位置。 (5) 通过 3D 传感器识别 夹具 通过 3D 传感器识别 夹具 的位置 ,测量夹具 的中心位置。 (6) 归还夹具 将夹具 返还至 CA L 块后, 吸嘴自动 返回 。 测量结束后,进 度条会变为 100% 。 循环多次 测量时,请选择 [ 确认 ] 。 选择 [ 确…
第 2 部 功能详解篇 第 10 章 自己诊断功能
10-23
2) [确认]按钮
按[确认]按钮,各 Head 单元即移动到等待位置开始测量。
有关详细,请参照下一项「设置方法」。
警告
按[确认],轴即移动。
按[确认]前,请务必确认没有人正在进行装置内部的作业。
为了防止人身伤害,运行中切勿将手伸入装置内部,也不要将脸和头靠
近装置。
10-3-3-7-1 设置方法
按下[确认]按钮,按照[操作]处显示的指示执行操作,自动取得数值。
完成设置前的动作如下所示。
(1) 吸嘴配置
在 Head 上安装 508 号吸嘴。此时,需要给 R-ATC 分配 508 吸嘴。
(2) 准备夹具
如果画面上有指示,就在 CAL 块中心放置夹具。
如果最初就放置了夹具,将无法正常识别 CAL 标记,请予以注意。
(3) 吸取夹具
吸取 CAL 块上的夹具之前,通过 OCC 相机识别夹具。
此时,可能会发生如下所示的错误。
发生该项错误时,请重新放置好夹具,再次按下「确定」。
如果重新放置夹具后仍然报错,可能是夹具上表面有脏污,请用无纺纸进行清扫。
第 2 部 功能详解篇 第 10 章 自己诊断功能
10-24
(4) 设置 Head 的移动
将设置的 Head 移动至设置的 3D 传感器识别位置。
(5) 通过 3D 传感器识别夹具
通过 3D 传感器识别夹具的位置,测量夹具的中心位置。
(6) 归还夹具
将夹具返还至 CAL 块后,吸嘴自动返回。
测量结束后,进度条会变为 100%。
循环多次测量时,请选择[确认]。选择[确认],将显示上一个画面。
结束测量,请取下放置在 CAL 块上的夹具。
按[确定]按钮,测量值会变为有效,但此时还不会被保存/设置。
退出应用程序时才会被设置。详情请参见「10-3-3-4-2 设置值的保存及退出」。
按[取消]按钮,测量值会无效。
第 2 部 功能详解篇 第 10 章 自己诊断功能
10-25
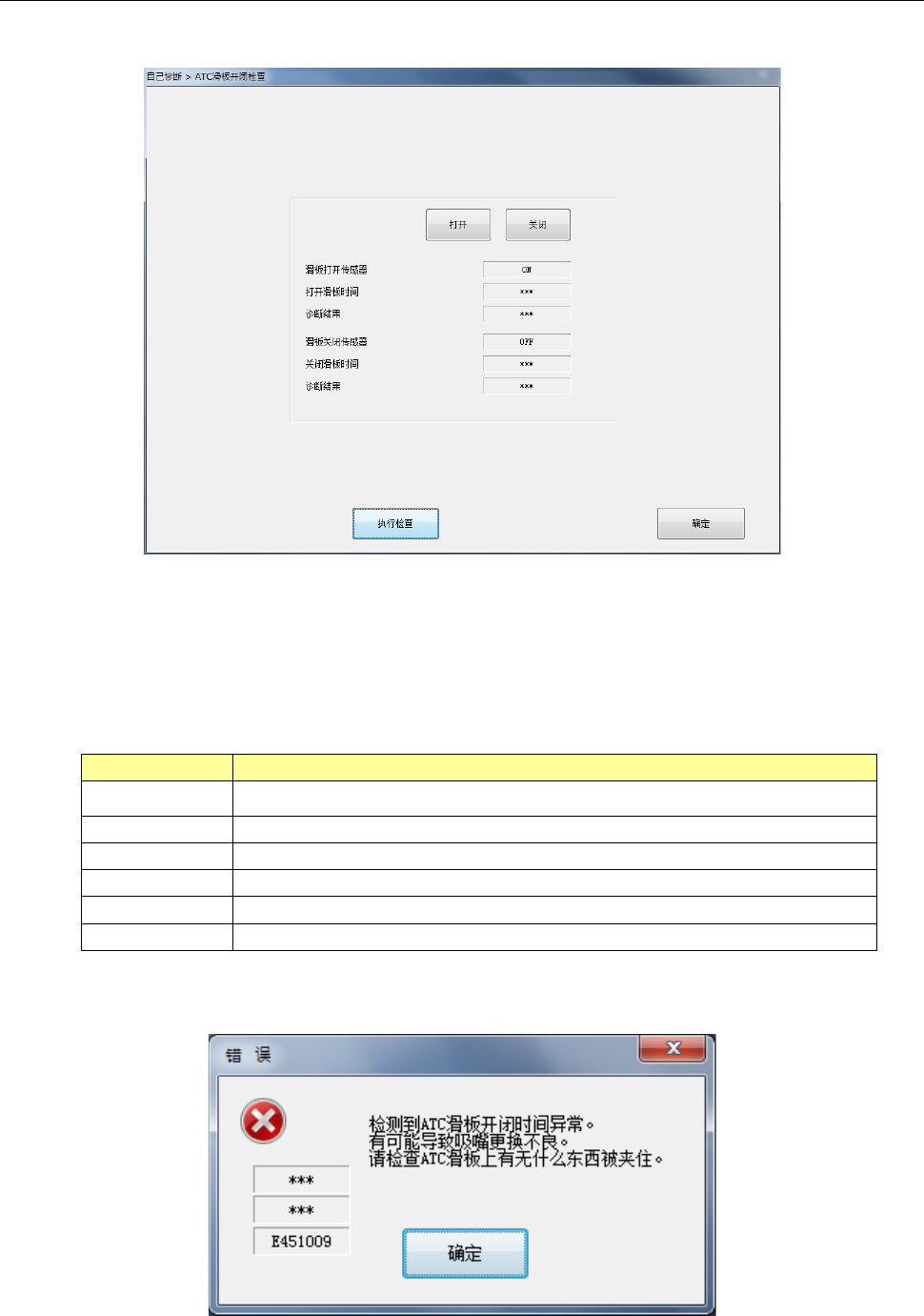
10-3-3-8 ATC 滑板开闭检查
在自己诊断菜单上选择[ATC 滑板]后,可显示 ATC 滑板开闭检查对话框。
按下「开」按钮,打开对象供料器台架的 ATC 滑板。
按下「闭」按钮,关闭对象供料器台架的 ATC 滑板。
按「确定」,关闭对话框。
指定要检查的供料器台架,按下[执行检查],执行 ATC 滑板开关检查。
项目
内容
滑板打开传感 ATC 滑板打开时的传感状态
滑板打开时间
ATC
滑板打开所需时间
诊断结果
滑板打开时间是否正常,以
OK
或错误显示
滑板关闭传感
ATC
滑板关闭时的传感状态
滑板关闭时间
ATC
滑板关闭所需时间
诊断结果
滑板关闭时间是否正常,以
OK
或错误显示
ATC 滑板开闭检查出现错误时,会输出如下信息。