JM-50使用说明书.pdf - 第44页
第 1 部 基本篇 第 1 章 装置概要 1- 27 1- 4 电气规格 (1) 控制方式 项目 控制方式 分辨度 X-Y 采用A C 伺服马达的半闭 环方式 1 μ m 机种名称 控制方式 分辨度 Z 采用A C 伺服马达的半闭环方式 1.25 μ m θ 0.00 5° ZA 1.25 μ m (2) 主机 C PU Intel® Celer on (3) 显示器 15 英寸( SVGA 模式液晶显示器) 对应触摸屏 (4) 数据及…
第 1 部 基本篇 第 1 章 装置概要
1-26
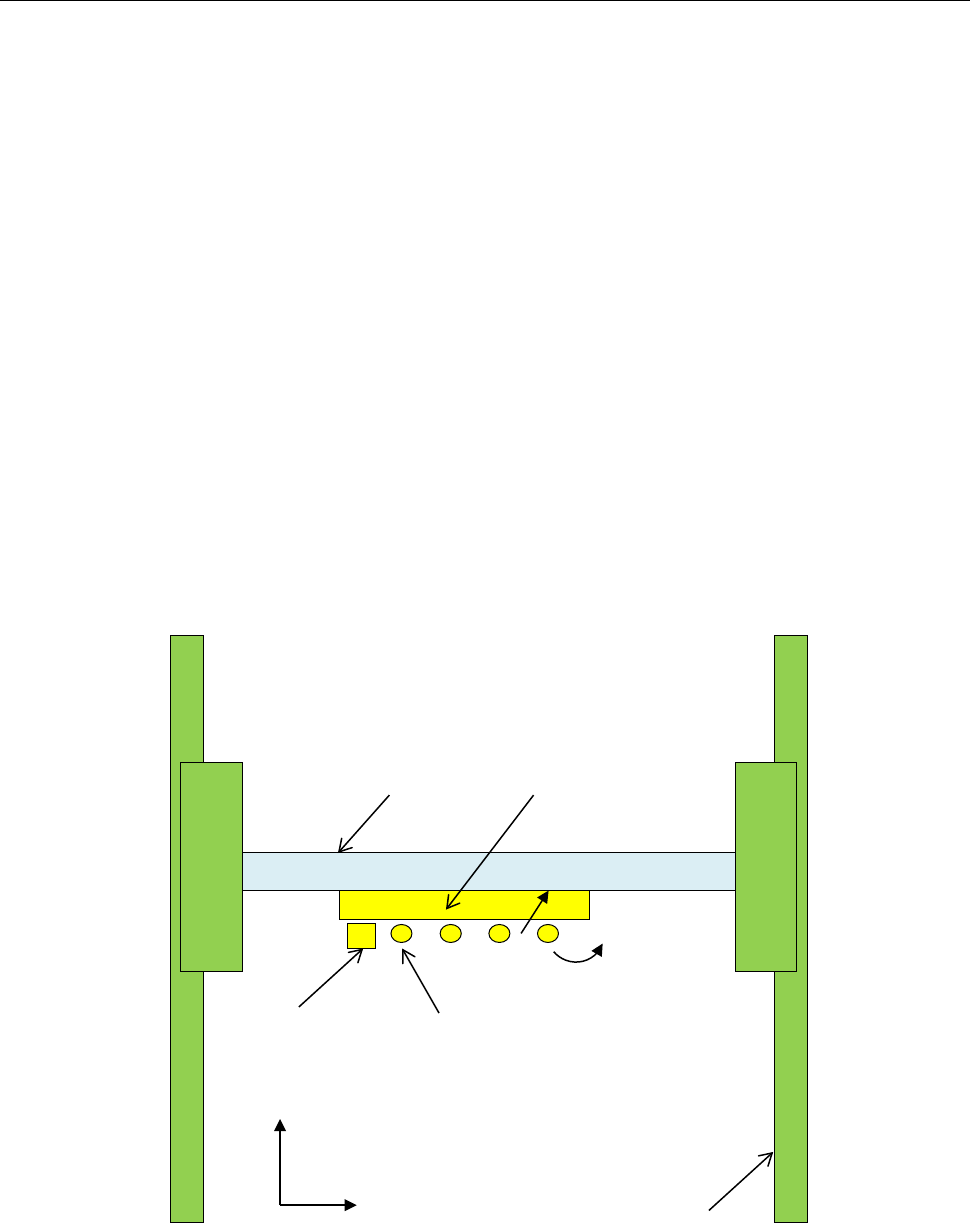
1-3-4 X, Y, Z, ZA, θ轴的说明
本装置的数值控制轴,为如下所示的 5 轴(X、Y、Z、θ、ZA)。
(1) X
、Y 轴
装置的左右方向为X,前后方向为Y,以0.01mm为单位,表示为X=○○○.○○mm,
Y=○○○.○○mm。
坐标系分为生产程序用坐标与示教用坐标。
两坐标系可自动变更,无需刻意分开使用。
(2) Z
轴
表示吸嘴的高度,以0.01mm为单位,表示为Z=○○.○○mm。
夹紧基板时基板上表面(不使用夹具)为0,上升方向为+。
(3)
θ
轴
表示Head的旋转角度,以0.05°为单位,表示为A=○○.○○。
以逆时针旋转为正值。
(4) ZA
轴
用于表示LNC120传感器的高度方向,以0.01 mm为单位用Z=○○.○○ mm表示。
夹紧基板时的基板上面(不使用工具)作为0,上升方向为+。
OCC
X 轴
Y 轴
L1 吸嘴轴
向右 L1~L4
贴片头
Y+
X+
Z+
θ
+
第 1 部 基本篇 第 1 章 装置概要
1-27
1-4 电气规格
(1) 控制方式
项目
控制方式
分辨度
X-Y
采用A
C
伺服马达的半闭环方式
1μm
机种名称 控制方式 分辨度
Z
采用AC 伺服马达的半闭环方式
1.25μm
θ
0.005°
ZA
1.25μm
(2)
主机 CPU
Intel® Celeron
(3)
显示器
15英寸(SVGA模式液晶显示器)对应触摸屏
(4)
数据及程序的输入输出
可通过触摸屏从软键盘手动输入。
使用USB闪存转移程序创建的数据。
与
提高车间生产性支持系统连接时,可通过LAN接口进行数据通讯。
(5) USB
端口
可与外部驱动器、外部存储装置连接。
(6)
电源
电压(三相) : AC200V、220V、240V、380V、400V、415V (标准、EN规格)
AC200V (基本规格)
电压允许范围 : ±10% (相对于额定电压)
视在功率 : 2.2kVA
频率 : 50 / 60Hz
短路电流额定值 : 1 kA
接地系统 : TN-S
电缆尺寸 : 5.5mm
2
以上
保护接地导线尺寸 : 5.5mm
2
以上
(7)
停电时的保护(不间断电源装置)
本机为了防止由于停电造成计算机数据的损坏和丢失,装备了对应不间断电源装置的ATX电源。
ATX电源作为备用电源,使用的电池设置为电池用完前停止系统运行。因此,停电时能安全可靠地
停止系统,不会导致数据的损坏和丢失。
第 1 部 基本篇 第 1 章 装置概要
1-28
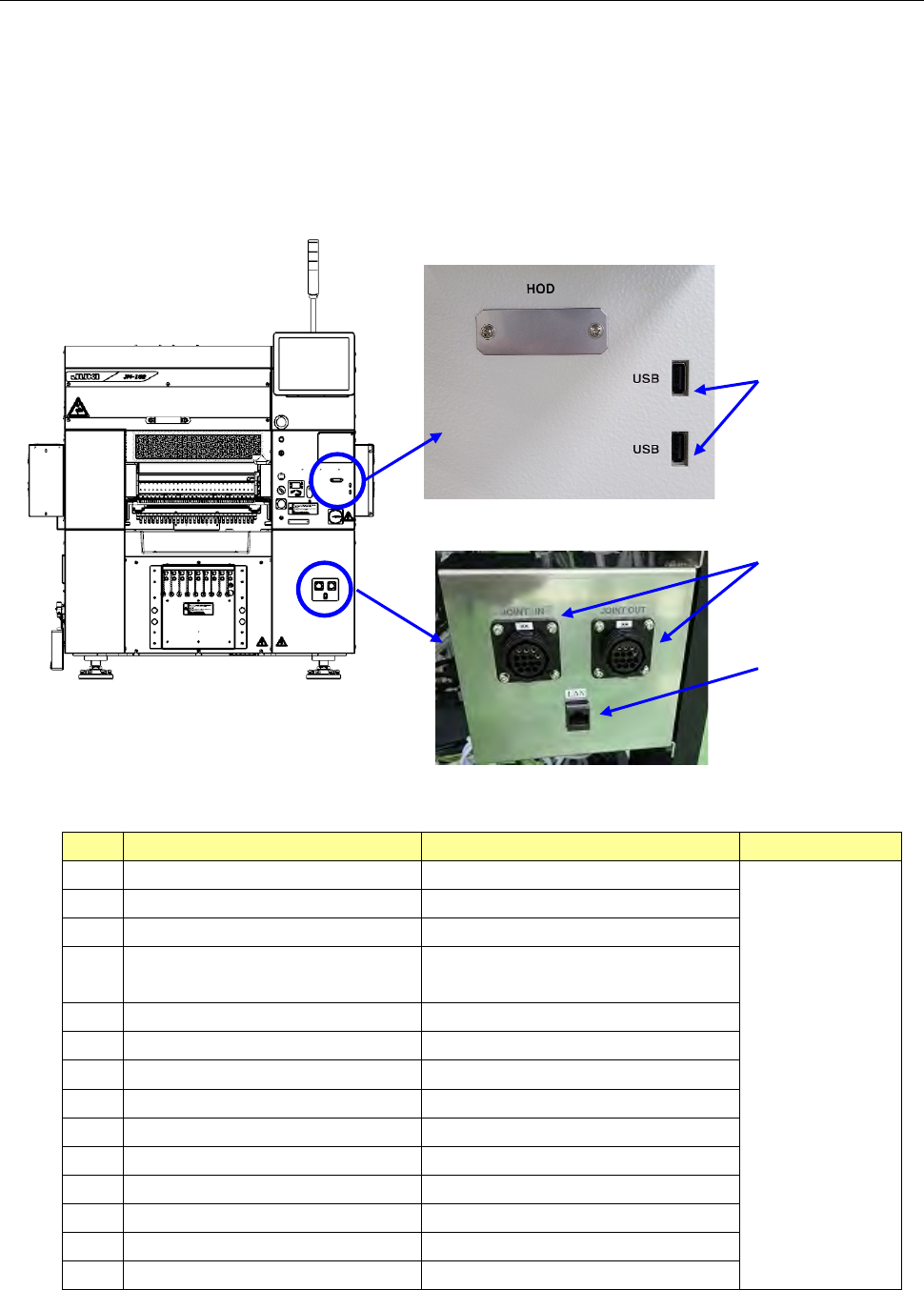
1-4-1 与外部装置的接口
① 是 USB 连接器,相当于 USB 2.0。
(使用闪存时,请务必在完成工作后拔下插头 。)
② 是在线使用主机时与其他设备连接的现成(in)连接器(14 针 )。
连接到主机上游侧的机器时,将其连接到 JOINT IN(左侧连接器)。
连接到主机下游侧的机器时,将其连接到 JOINT OUT(右侧的连接器)。
③ 是以太网连接器(模块化连接器 8P)。
主机正的接口表
No.
信号名 传送方向 向右流向
信号名 传送方向 向左流向
使用的接口
1
READY OUT
+
READY IN
+
AMP
206043-1
电缆侧
连接插头
206044-1
2
READY OUT
-
READY IN
-
(
GND
)
3
BOARD AVAILABLE IN
+
BOARD AVAILABLE OUT
+
4
BOARD AVAILABLE IN
-
(
GND
)
BOARD AVAILABLE OUT
-
5
N.C.
N.C.
6
N.C.
N.C.
7
N.C.
N.C.
8
N.C.
N.C.
9
N.C.
N.C.
10
N.C.
N.C.
11
N.C.
N.C.
12
N.C.
N.C.
13
N.C.
N.C.
14
N.C.
N.C.
①
②
③