JM-50使用说明书.pdf - 第397页
第 1 部 基本篇 第 4 章 制作生产程序 4- 97 HMS 测定动作 的流程 为 如下 所示。 測定成功 ? START ( ラジアルフィーダからの 吸着 で 部品無 し 判定) 再吸着 測定不可 フィード 吸着回数<=リトライ 回数 Yes クランプ ON 設定 の 場合 はクランプ 部品有無測定位置 1点目 移動 エラー要因 ” 部品切 れ ” No ( リトライオーバ ) エラー 要因 ” 部品切れ(吸着ミス ) ” 部品有…
第 1 部 基本篇 第 4 章 制作生产程序
4-96
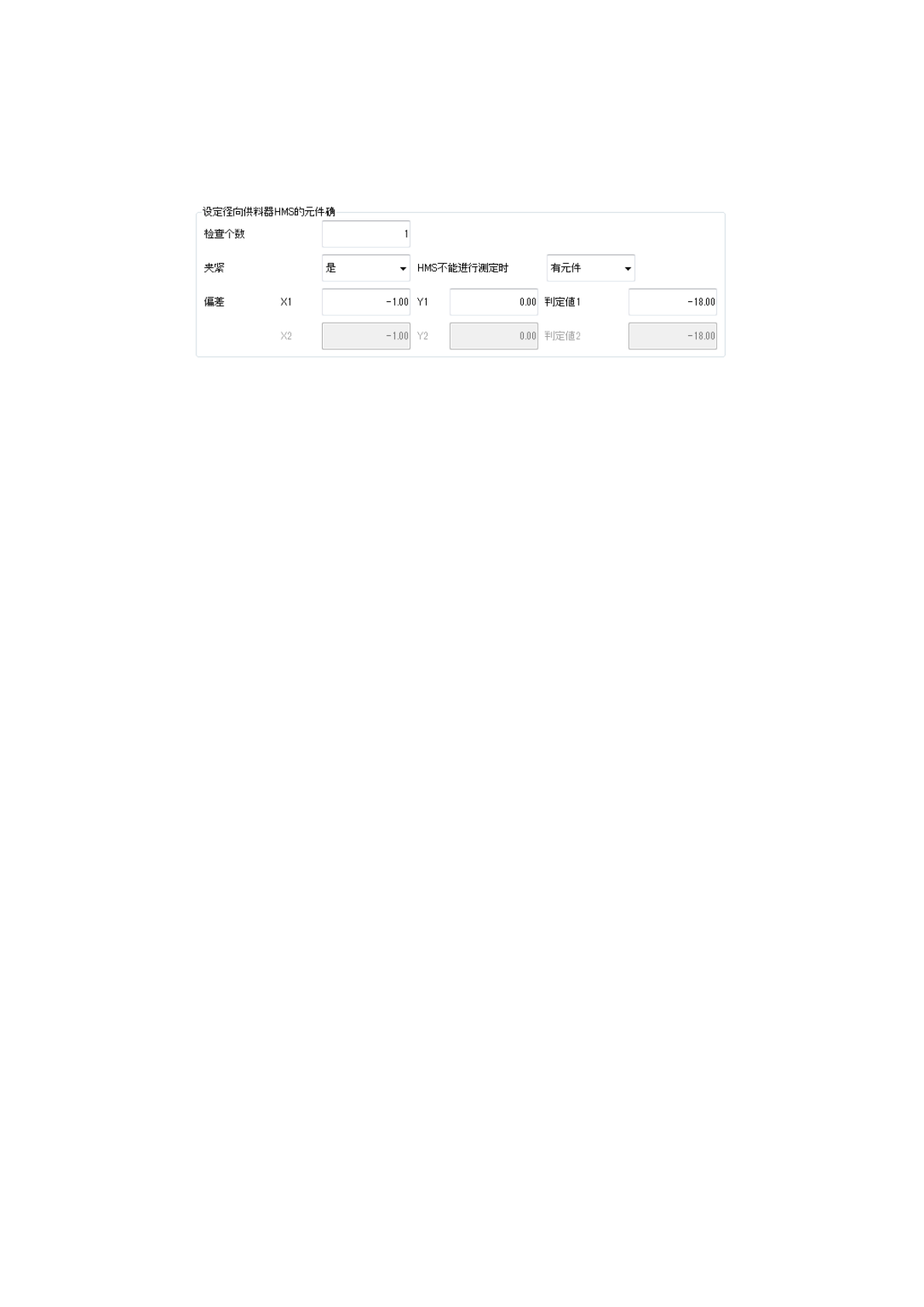
2) 设定径向供料器 HMS 的元件确认
从径向供料器吸取元件失败时,用 HMS 检测径向供料器有无元件的功能。
仅在元件种类为「插入元件」「 INS 电解电容器」,并且包装形式「INS 带状」处的类型选择为
「MRF-S」「MRF-SN」「MRF-L」时可以进行设定。
检查个数
测定位置的个数。
夹紧
设定在夹紧状态下是否用 HMS 执行有无元件确认。初始设置的夹紧为「是」。
不能进行 HMS 测定时
设定 HMS 测定失败时有无元件的状态。初始设置为「有元件」。
偏差 XY
距元件吸取位置的偏移量值。HMS 元件有无测定的位置为
元件吸取位置 XY + 偏差量 XY。
初始设置为「X=-1」「 Y=0」。 并且可以执行示教。
1 个元件有多个吸取数据时,移动至最初找到吸取数据的吸取位置。
※请从无元件和有元件两种情况,对 HMS 可测定的位置进行示教。
判定值
用于有无元件的判定。
HMS 测定结果 > 判定值 → 有元件。
HMS 测定结果 ≦ 判定值 → 无元件。
初始设置为「Z = -18」。 并且可以执行示教。
1 个元件有多个吸取数据时,移动至最初找到吸取数据的吸取位置。
※ 请参照以下公式输入判定值。
判定值 = 切刀刀刃测定值(无元件时) + 管脚长度 - 2mm(夹紧管脚的管脚长度)
第 1 部 基本篇 第 4 章 制作生产程序
4-97
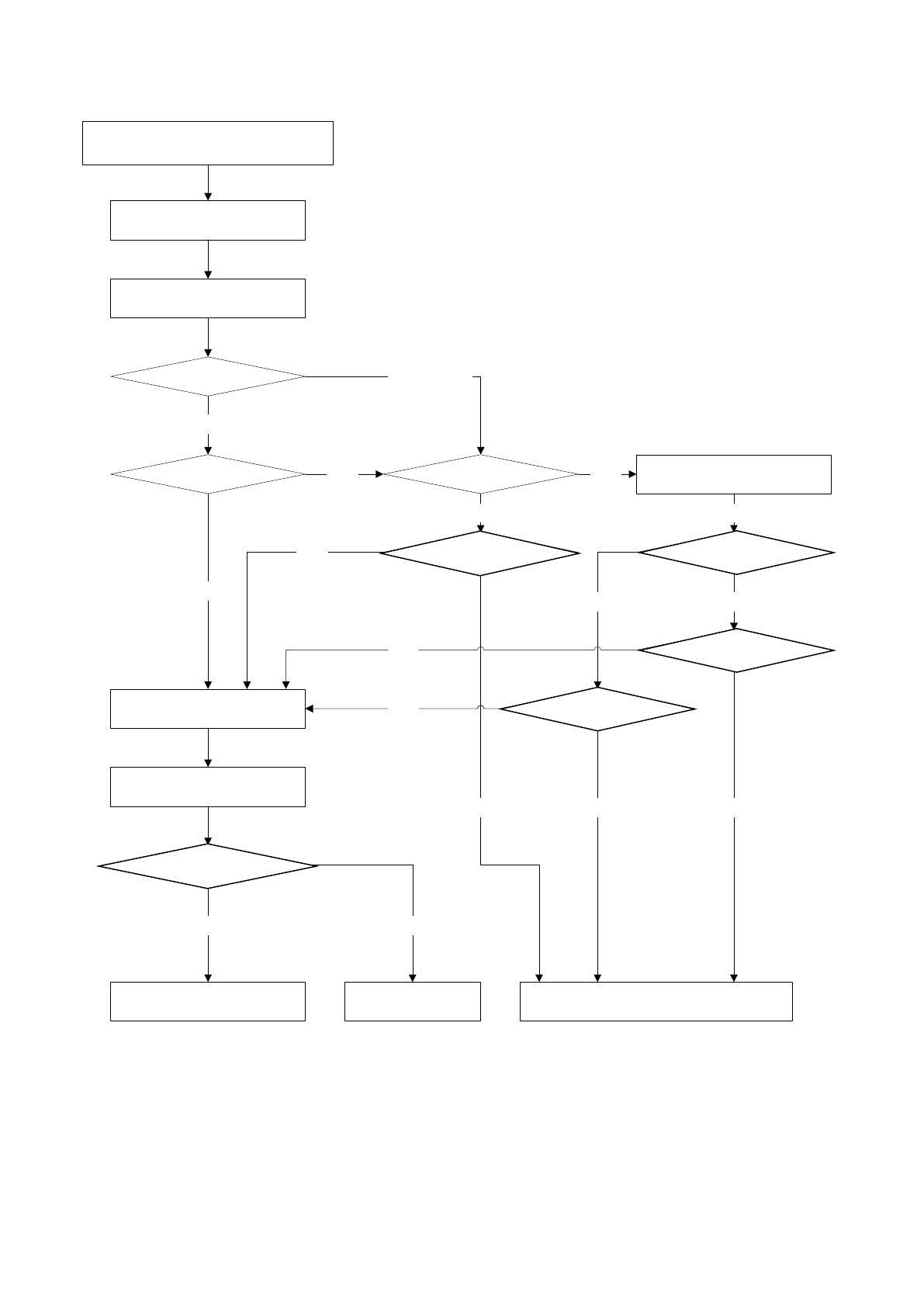
HMS 测定动作的流程为如下所示。
測定成功
?
START
(
ラジアルフィーダからの
吸着
で
部品無
し
判定)
再吸着
測定不可
フィード
吸着回数<=リトライ
回数
Yes
クランプ
ON
設定
の
場合
はクランプ
部品有無測定位置
1点目
移動
エラー要因
”部品切
れ”
No
(リトライオーバ)
エラー
要因
”部品切れ(吸着ミス
)”
部品有り
?
測定成功
無し
クランプON設定の
場合はクランプ解除
測定成功?
有り
はい
測定不可
部品有り?
測定成功
無し
有り
HMS測定不可時
?
有り
無し
検査個数「2」?
部品有無測定位置
2点目
移動
はい
HMS
測定不可時?
無
し
有
り
いいえ
START
(轴向供料器的吸取判定无元件)
夹紧设为
ON
时执行夹紧
有无元件测量位置的第 1 点 移动
测量成功?
不能测量
测量成功
有元件?
有
无
无
无
无
不能测量
测量成功
检查个数
2
?
是
否
是
有无元件测量位置的第
2
点
移动
夹紧设定为
ON
时解除夹紧
有
有
有
反馈
是
否(重试超时)
重新吸取次数
错误原因
“元件用尽”
错误原因
“
元件用尽(吸取失误)
”
吸取次数<=重试次数
HMS
不能测量时?
测量成功?
HMS
不能测量时?
有元件?
第 1 部 基本篇 第 4 章 制作生产程序
4-98
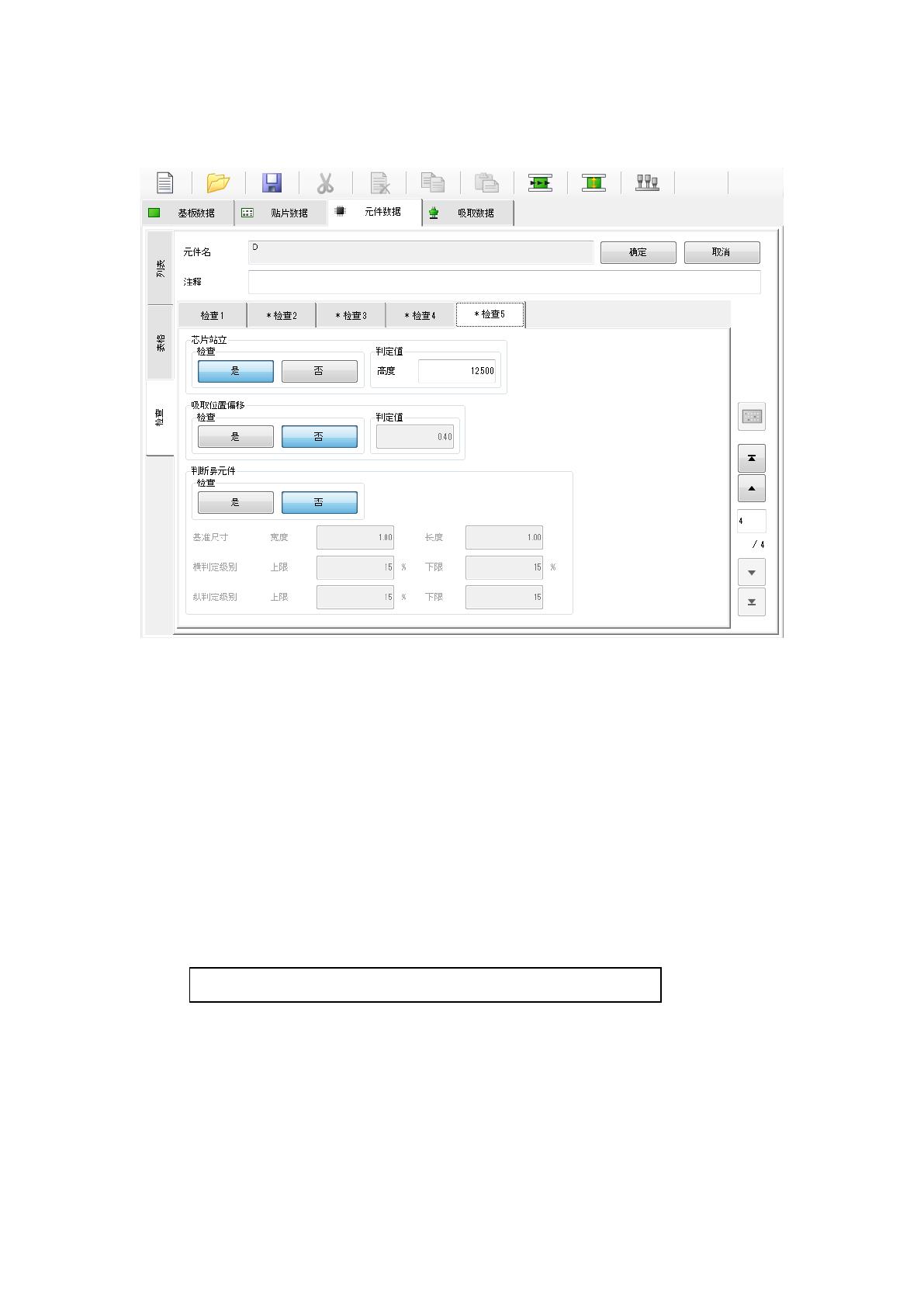
(10) 检查 5
对“芯片站立”、“ 元件方 向 ”、“ 吸取位置偏移”进行设定。
1) 芯片站立
指定是否对芯片站立进行检查。
通常对 3216 以下的芯片元件推荐执行检查,因此选择元件类别为「方形芯片」时,自动设置
为[是]。
判定值根据已输入的元件高度尺寸计算并自动输入。
2) 吸取位置偏移
使用此项功能,可以检查元件中心偏离吸嘴中心是否超过判定值。
对需要使用吸取位置偏移检出功能的元件请选择[是],并输入判定值。
判定值的可输入范围为:0~元件外形的纵向尺寸。(元件供应角度为 90°、270°时,元件的外
形尺寸为横向。)
检查设置为[是]时,默认判定值为:
设定值,在编辑程序的环境设置中进行设置。默认值为 50(%)。
3) 判断异元件
用单选按钮指定是否进行异元件的判断。
基准尺寸的设置值为设置元件的纵、横尺寸。在横/纵判定级别中分别用百分比设置可容许的
基准尺寸中设置值与实测值的偏移上限、下限。
元件外形纵向尺寸(或外形横向尺寸)÷2×(设定值/100)