RX-6 使用说明书 用户使用 Rev11.pdf - 第406页
第 1 部 基本篇 第 4 章 制作生产程序 4- 58 2 )管式 的输入方法 ① 类型 选择管式供料器 的类型。 ② 送料等待时间 从元件吸取完成后到可吸取下一个元件之间的等待时间 ( 根据各供料器型号设置的值 ) 与实际等待 时间的比例,以 百分比的形式进行设置。 初始值为 100% 。 ③ 元件供应角度 以 JUK I 的元件供应角 度为 0° ,输入管 式供料器 上的元件包装姿 势的倾斜 角度。 详细内容请参见 「( 1 )带…
第 1 部 基本篇 第 4 章 制作生产程序
4-57
④ 废弃元件
对在定心时发生识别错误,或引脚悬浮检查时发生错误的元件废弃方法进行设置。
从组合框的下拉菜单中选择元件废弃方法。
根据“供应形式”的选择状态,下拉菜单的内容会有变化。
下拉列表的项目
内容
废弃盒 ・全部元件均可选择。
长边、短边、高度在 15mm 以内的元件为小型废弃盒
长边 180mm、短边在 35.5mm 以内的元件为中型废弃盒
长边 80mm、短边在 50mm 以内的元件为大型废弃盒
除此以外的元件为特大废弃盒
在上述废弃盒中使用相应的最小废弃盒。
放回托盘
・包装选择为托盘时,可选择此项。
IC
回收带
・如果是可选择图像定心的元件时,可选择此项。
元件保护 ・全部元件均可选择。
⑤ 输送速度
设置电动式供料器的间距输送速度。
要变更输送速度时,设置选择“使用”,从下拉列表中选择“高速”、“中速”、“低速”。
如果因供料而导致空洞(Cavity)内的元件倒下,有可能通过改变速度能够抑制。
⑥ 接缝传感器
设置是否使用电动送料器(RF)的接缝传感器。
是否使用
内容
使用
(默认)
如果可以使用接缝传感器就使用。
但当机器设置的“不要使用接缝传感器”为 ON 时,则不使用接缝传感
器,与元件数据的设置无关。
不使用 即使可以使用接缝传感器也不使用。
第 1 部 基本篇 第 4 章 制作生产程序
4-58
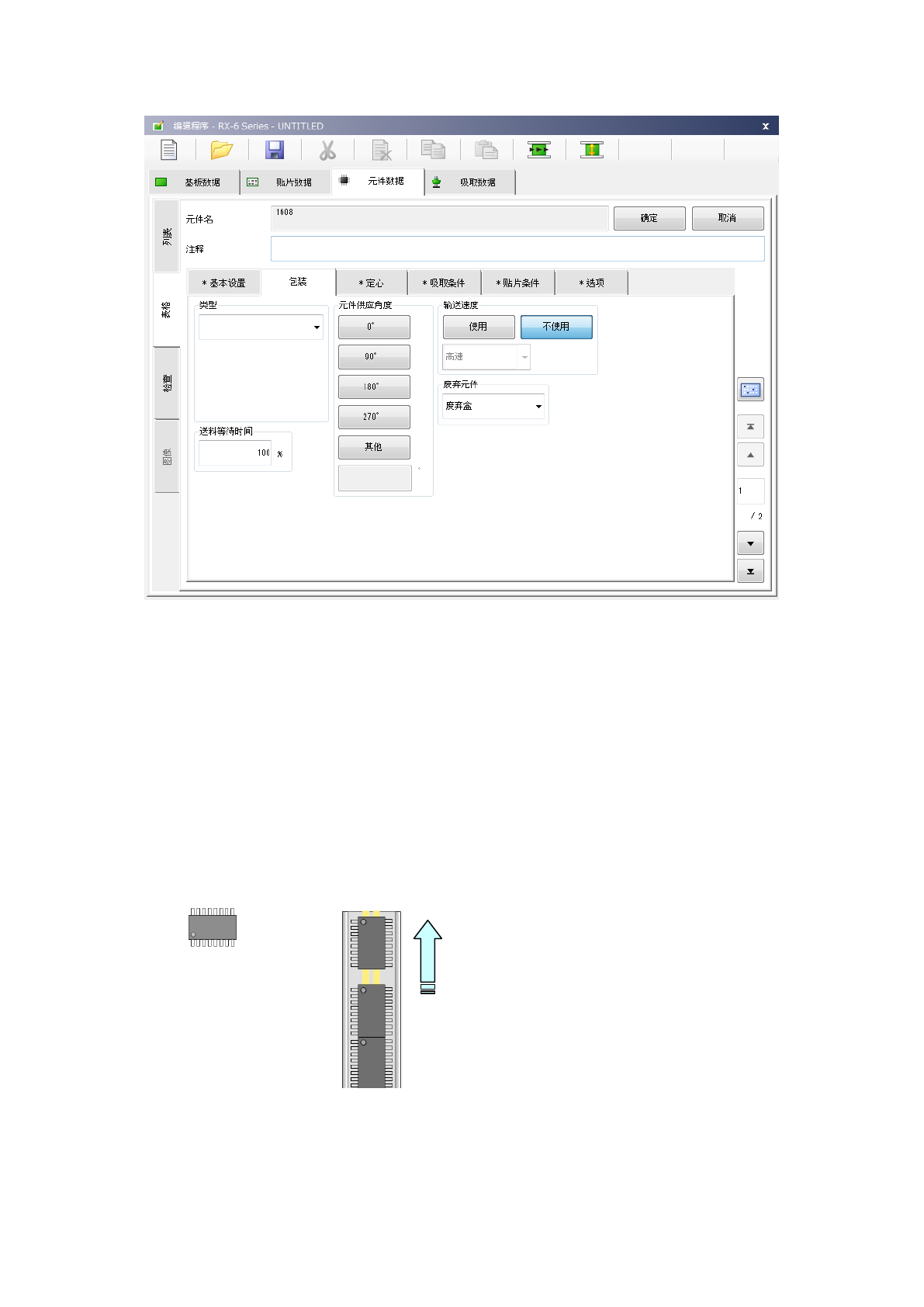
2)管式的输入方法
① 类型
选择管式供料器的类型。
② 送料等待时间
从元件吸取完成后到可吸取下一个元件之间的等待时间(根据各供料器型号设置的值)与实际等待
时间的比例,以百分比的形式进行设置。
初始值为100%。
③ 元件供应角度
以JUKI的元件供应角度为0°,输入管式供料器上的元件包装姿势的倾斜角度。
详细内容请参见「(1)带式的输入方法 ※JUKI的元件供应角度定义」。
要选择其他数据时,请在编辑框内输入角度。(0°~ 359.9875°)
④ 废弃元件
对在定心时发生识别错误,或引脚悬浮检查时发生错误的元件废弃方法进行设置。
详细情况请参见 4-3-5-2 (2)包装(1)带式的输入方法 的「废弃元件」。
传送方向
角度定义 0°
供应角度 270°
第 1 部 基本篇 第 4 章 制作生产程序
4-59
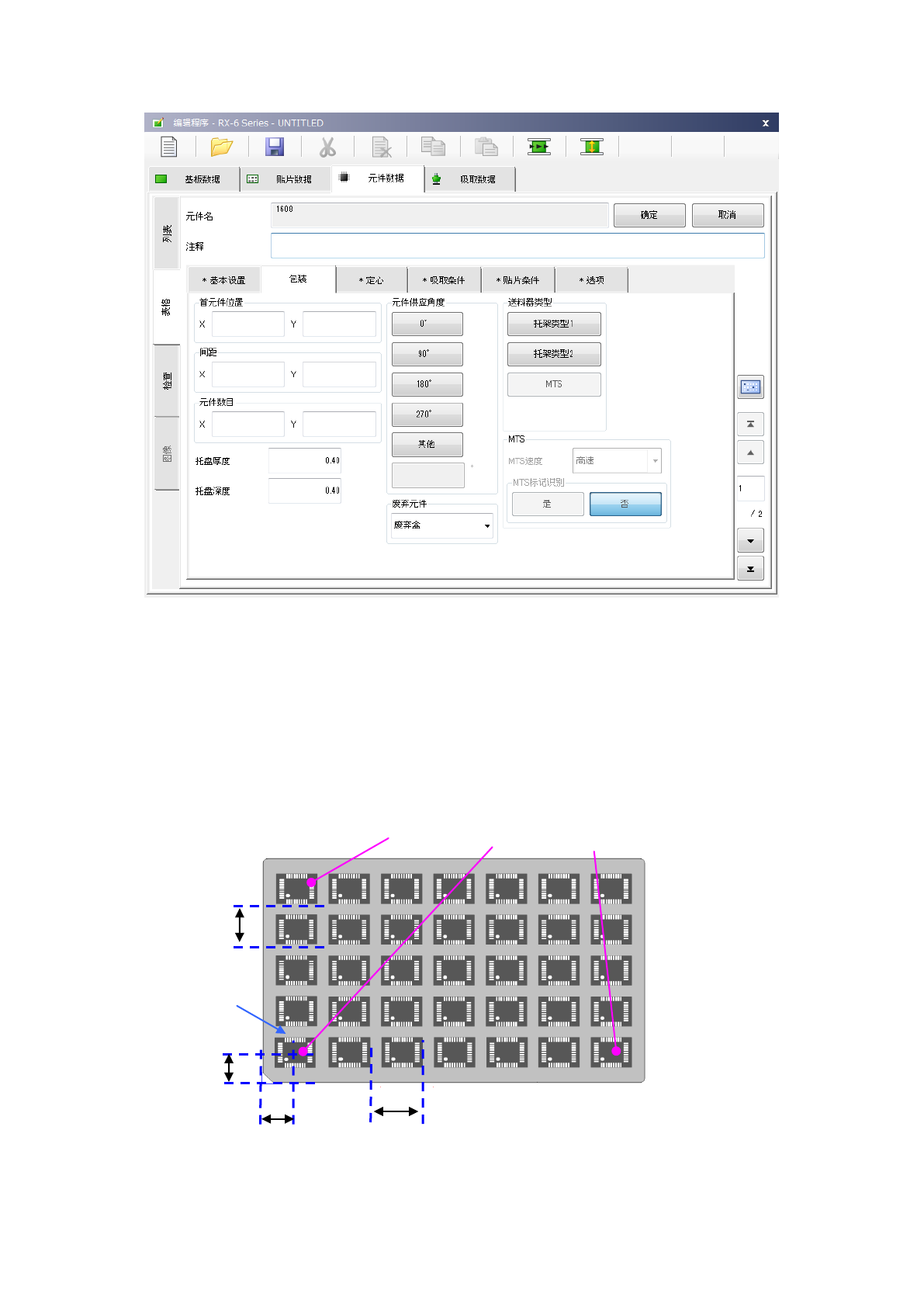
3)托盘的输入方法
① 首元件位置
托盘元件的首元件中心位置尺寸(X、Y) : 输入托盘外形起的尺寸。
② 间距
输入元件的间距(间距X、间距Y)。
③ 元件数目
输入横向、纵向的元件数(Xn、Yn)。
吸取数据/供应位置确定后,吸取数据里即可显示出托盘的 3 处坐标。
(X
1
,Y
1
~X
3
,Y
3
)
首元件位置 X
首元件位置 Y
首元件
间距 X
间距 Y
(X
2
,Y
2
)
(X
1
Y
1
)
(X
3
Y
3
)