RX-6 使用说明书 用户使用 Rev11.pdf - 第976页
第 2 部 功能详解篇 第 12 章 选项组件 12 - 34 ・ 调 节器 旋转 1 圈会变化 2.5 mm 高度 。 ・ 调节器的螺丝存在游隙 ,用螺母固定调节器时, 请注意以下事项。 ① 考虑 游隙,使 Z 高度处于 - 9.15 mm 左右 ② 拧紧 固定用 螺母时,调整高度用 螺母也要用扳 手夹住,紧紧压住调节器 ,使其不会旋转。 ・ 请 均匀旋转 4 个脚轮、调节器, 使其接地。 ・ 安装 完成后 ,将 EF08 ( HS …
第 2 部 功能详解篇 第 12 章 选项组件
12-33
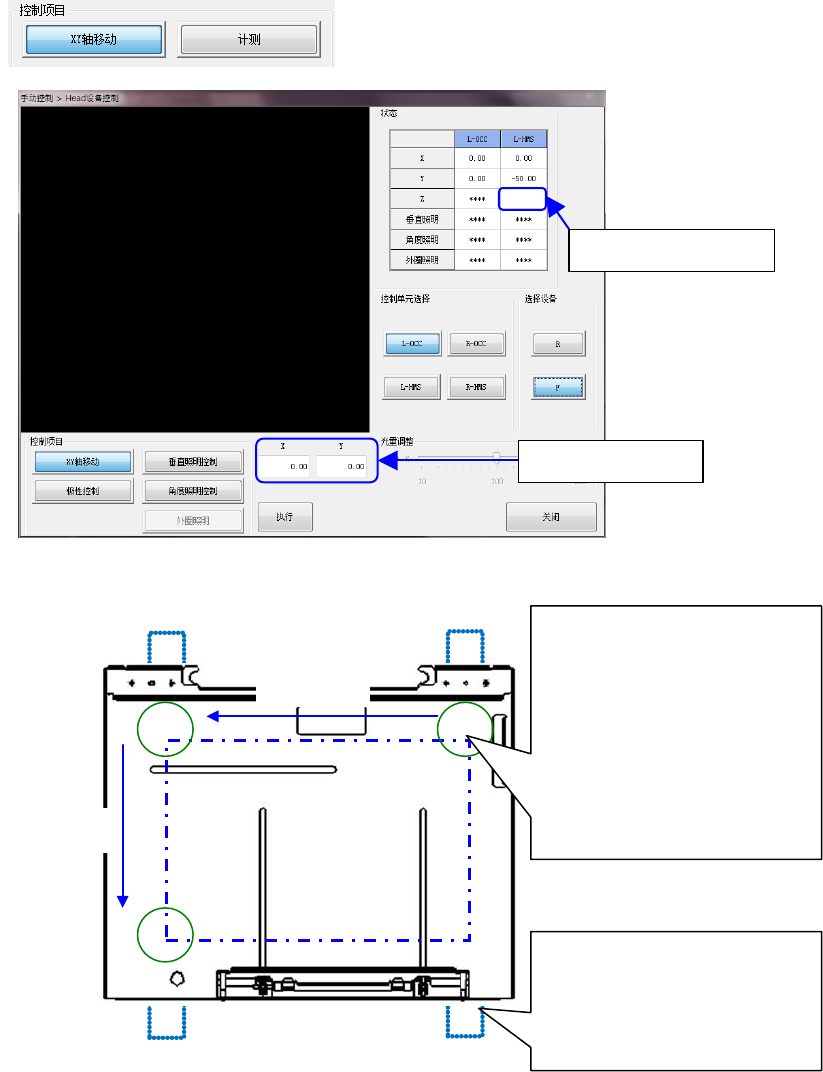
确认画面,点击画面的 XY 轴移动及 Z 高度计测⇔反复调整调节器的高度,使空白状态的托盘底座上部
3 点的 Z(高度)数值为 -9mm±0.1mm。
调整完成后,拧紧调节器的螺母,固定高度。
以托盘底座前侧为起点,
用后侧 Head 的 R-HMS
测量 3 点高度。
大致为
①X=400 Y=1220
②X=675 Y=1220
③X=675 Y=1400
测量点的位置要位于使托盘
底座置于白色轨道上,在托
盘底座弯曲较少的位置。
275mm
180mm
①
②
③
Z 高度显示框
X,Y 坐标输入框
第 2 部 功能详解篇 第 12 章 选项组件
12-34
・ 调节器旋转 1 圈会变化 2.5mm 高度。
・ 调节器的螺丝存在游隙,用螺母固定调节器时,请注意以下事项。
① 考虑游隙,使 Z 高度处于 -9.15mm 左右
② 拧紧固定用螺母时,调整高度用螺母也要用扳手夹住,紧紧压住调节器,使其不会旋转。
・ 请均匀旋转 4 个脚轮、调节器,使其接地。
・ 安装完成后,将 EF08(HS 或 HD)插进后侧 14 号通道,如果没有干扰,即为正确位置。
请关闭 RX-6 安全罩,确认 TR8S 不会干扰主机。
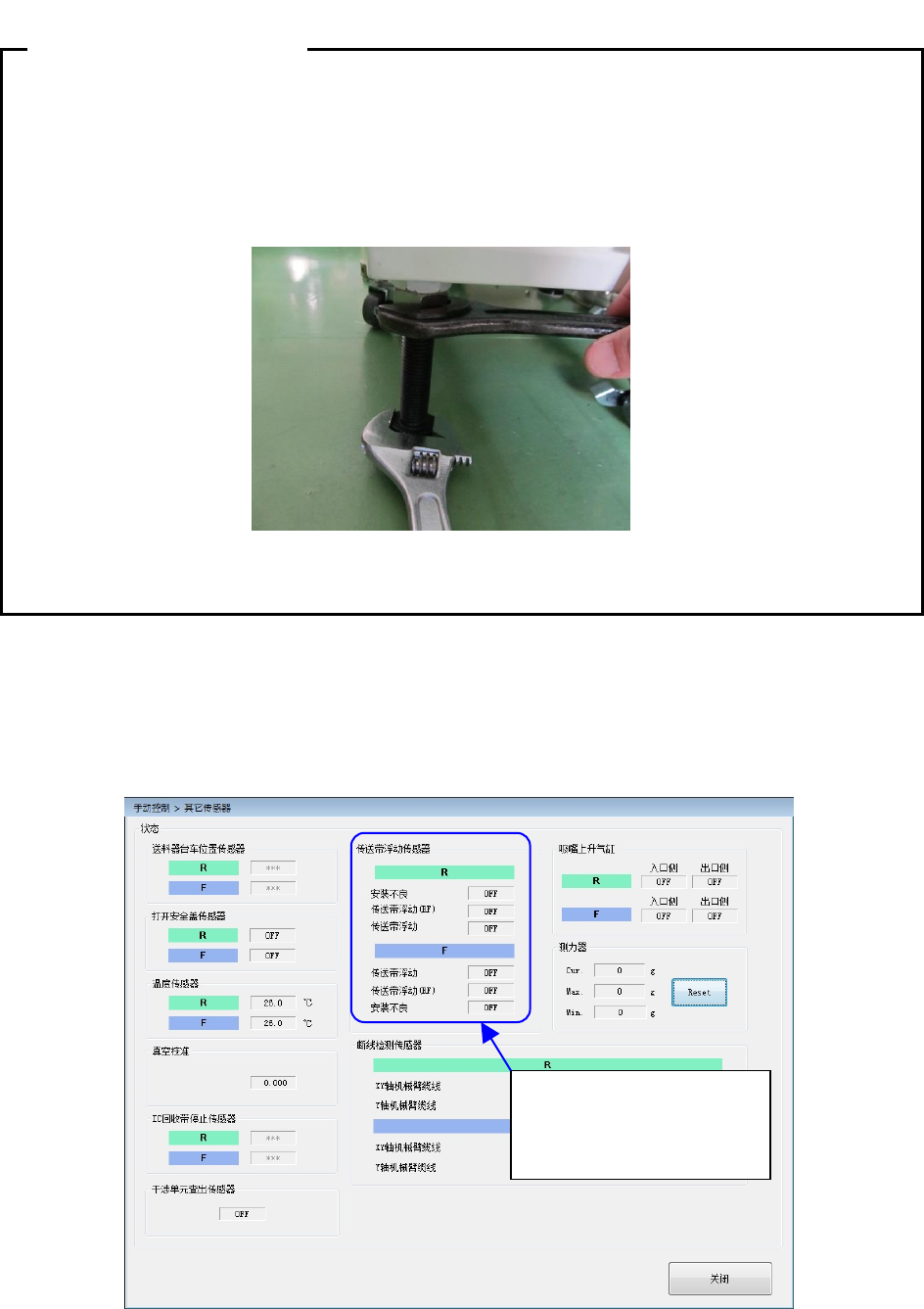
(8) 传感器确认
进入手动>其他>其他传感器
请使用 ETF8S 及 ETF8D,对后侧供料器浮动传感器的动作状况进行以下作业并进行确认。
・ 故意打开供料器护罩,插入台架时传感器是否变为 ON。
・ 在供料器护罩正常关闭的状态下,从台架拔出供料器时,传感器为 OFF 的状态下能否拔出。
水平调整的提示
供料器浮动传感器
・ 检测出时「ON」
・ 未检测出时「OFF」
第 2 部 功能详解篇 第 12 章 选项组件
12-35
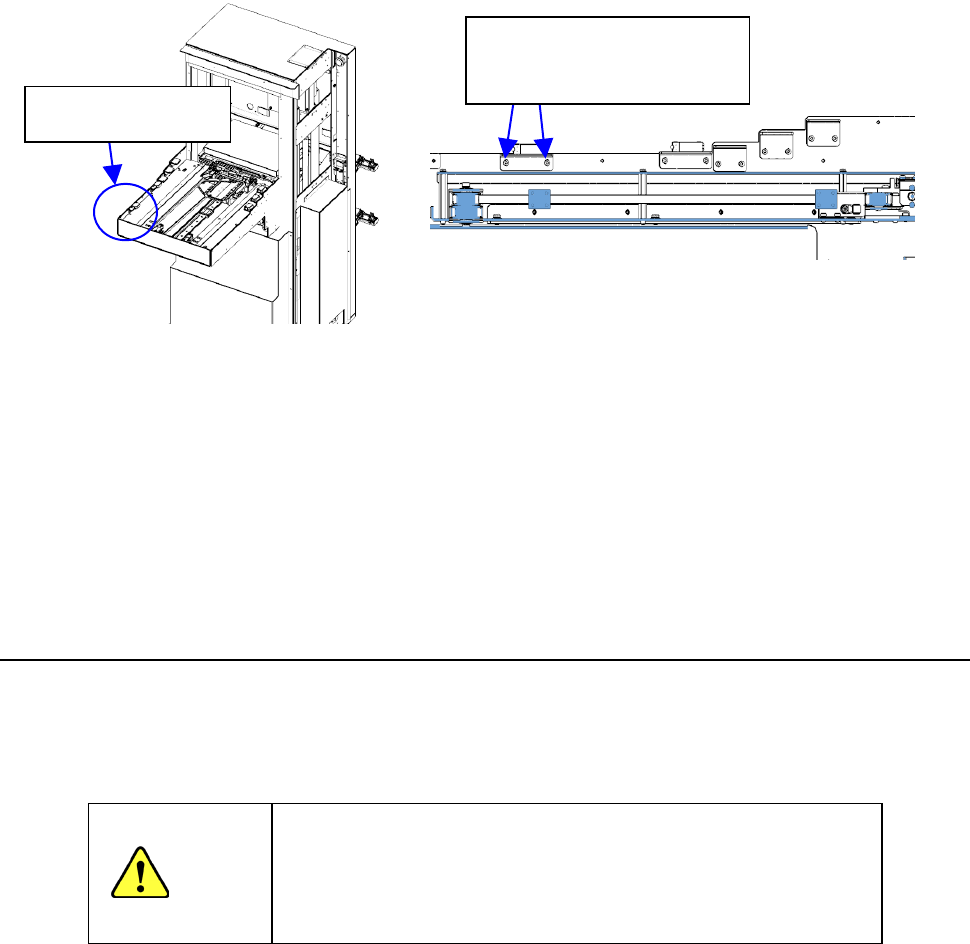
发生误检测、未检测时,请重新调整 TR8S 端的供料器浮动传感器高度。
操作步骤
① 请打开 ETF8S 的供料器护罩,插入后侧 1 号、7 号、14 号通道。
② 如果未能检测到打开的供料器护罩,将 TR8S 端的供料器浮动传感器一点点地下降到要检测的位置。
③ 将 ETF8D 插入后侧 1 号、7 号、14 号通道,拔出时在轨道的游隙之间摇动供料器。
④ 如果发生了误检测,请将 TR8S 端的供料器浮动传感器一点点地上升至不误检测的位置。
⑤ 请再次进行①的操作,确认检测到供料器护罩打开。
通常仅进行①和③,发生重新调整时,请进行②、④、⑤的操作。
最后,请进行「MTS 安装位置偏移量」的设定。
12-5-3 TR8S 拆卸方法
① 使 RX-6 动作停止。
② 使脚轮接地,使调节器的脚从接地面升起。
➂ 将 TR8S 缓缓拉出,勿使其与 RX-6 内部配件接触损坏。
④ 关闭一下主机空气阀门,拔下通信线、电源线、空气管。
将 TR8S 从 RX-6 拆下后,务必装上分离的安全罩配件
、气弹簧、
护罩挡块。
如果在安全罩开口部位打开的状态下使 RX-6 动作,若手或身体
误伸入动作中的装置中,会造成重大事故。
警告
供料器浮动传感器
サ
调整时,稍稍拧松螺丝,逐
步对高度进行调整。