多功能晶圆单元使用说明书.pdf - 第78页
4. 安装 INS-NXTMWU-4.2S 64 多功能晶圆单元使用说明书 3. 启动 MWU 调整工具,切换到测定画面。 a. 打 开 [MWU.exe]。 显示 MENU 画 面。 b. 在 [Connect I P Address] 中输 入要安装多功能晶圆 单元的基座的 I P 地址。确认 [M1(P)] 中 选择了复选框。 c. 点 击 [Connection check] 指令,确 认显示了 [ OK]。 d. 在 I/O …
INS-NXTMWU-4.2S 4. 安装
多功能晶圆单元使用说明书 63
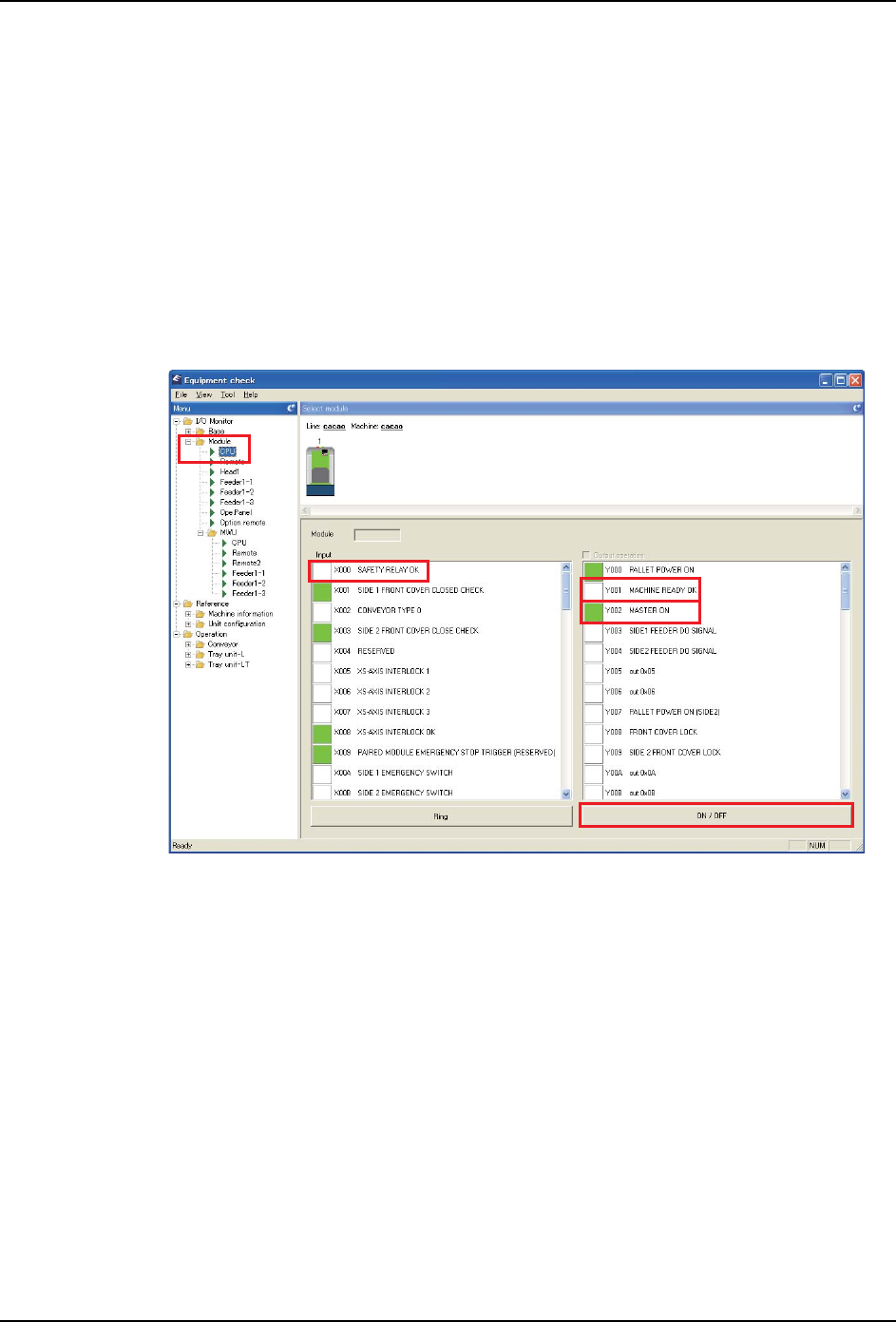
2. 在 [Equipment Check] 的 I/O 监视器中将安全继电器设置为 ON。
备注 )关于[Equipment Check]的详细内容,请参照[NXT II系统手册]的[NNXT-2软件工具]。
a. 启动 [Equipment Check]。
b. 在 [Select Module] 框内选择进行作业的模组。
c. 在 [Menu] 框内选择 [I/O Monitor]-[Module]-[CPU]。显示 I/O 监视器。
d. 选择输出信号的 [MASTER ON],点击 [ON 或 OFF]。
e. 选择输出信号的 [MACHINE READY OK],点击 [ON 或 OFF],变成 ON 的状态。下一步,
再次点击 [ON 或 OFF],将 [MACHINE READY OK] 变成 OFF 的状态。
f. 确认输入信号的 [SAFETY RELAY OK] 是否变成 ON 的状态。
01NST-2007E
4. 安装 INS-NXTMWU-4.2S
64 多功能晶圆单元使用说明书
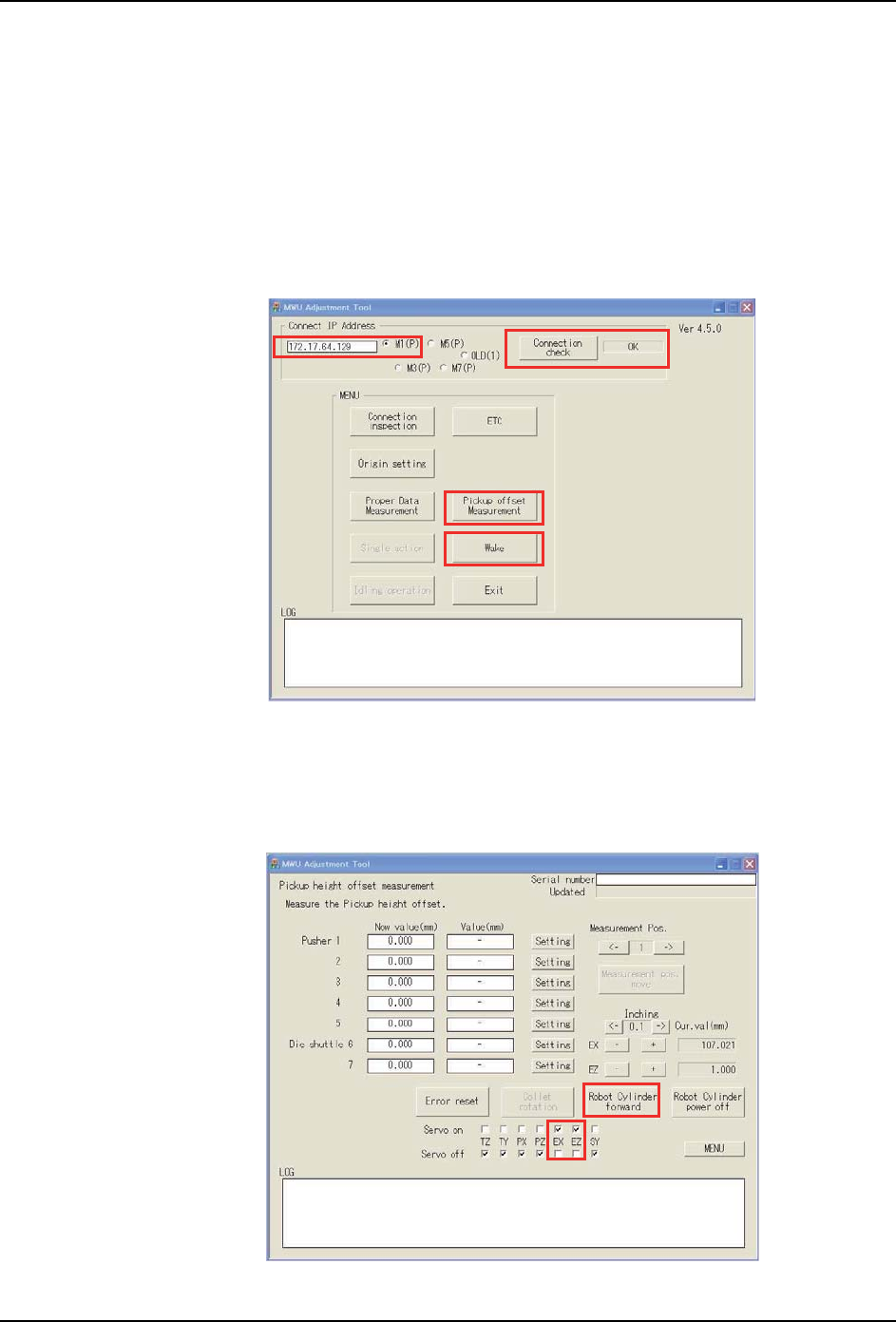
3. 启动 MWU 调整工具,切换到测定画面。
a. 打开 [MWU.exe]。显示 MENU 画面。
b. 在 [Connect IP Address] 中输入要安装多功能晶圆单元的基座的 IP 地址。确认
[M1(P)] 中选择了复选框。
c. 点击 [Connection check] 指令,确认显示了 [OK]。
d. 在 I/O 监视器中确认模组的 [SAFETY RELAY OK] 变成了 ON,点击 [Wake] 指令。
e. 点击 [Pickup offset measurement] 指令。显示吸取高度修正测定画面。
4. 固定顶起 X 轴部和顶起 Z 轴部,将顶起单元移动到直接供应位置。
a. 选择 [EX]、[EZ] 的复位侧的复选框。EX 轴、EZ 轴被固定。
b. 点击 [Robot Cylinder forward] 指令。顶起单元移动到直接供应位置。
01NST-2005E
01NST-2006E
INS-NXTMWU-4.2S 4. 安装
多功能晶圆单元使用说明书 65
5. 开始顶起 1 位置的吸取高度修正测定。
a. 点击 [Measurement POS.] 的箭头按钮,选择 [1]。
b. 点击 [Measurement POS.move] 指令,顶起 X 轴、Z 轴部移动到顶起位置 1。
备注 )如果此时按下了紧急停止按钮,请解除紧急停止按钮,进行以下步骤 j ~ l 的作业。
c. 按下模组的紧急停止按钮,打开侧面盖罩。
d. 用手移动 NXT-2 的 XY 轴,将千分表靠住顶起调整治具的上面。
注意 )用手移动 XY 轴时,请握住框架部。请不要握住工作头夹紧治具进行移动。
e. 确认 EZ 轴的 [Cur.val(mm)] 是否变成了 [29.0]。
备注 )如果 EZ 轴 [Cur.val(mm)] 不是 [29.0],请重新从 [Measurement pos.move] 指令开始
进行。
f. 读取千分表的数值。
备注 )顶起调整治具高度大于 Z0 (刻度 0)时为正值,小于 Z0 时为负值。
g. 将千分表的读取值输入到 [Pusher1] 的 [Value(mm)] 中,点击 [Setting] 指令。数
值被反映到 [Now value(mm)] 中。
h. 用手移动 NXT-2 的 XY 轴,将千分表移动到退避位置。
注意 )用手移动 XY 轴时,请握住框架部。请不要握住工作头夹紧治具进行移动。
i. 关闭侧面盖罩,解除紧急停止按钮。
j. 在 [Equipment Check] 的 I/O 监视器中将安全继电器设置为 ON。(参照步骤 2.)
k. 点击 [Error reset] 指令。
01NST-2009S
乊䍋
1
乊䍋
2
乊䍋
3
乊䍋
4
乊䍋
5