多功能晶圆单元使用说明书.pdf - 第91页
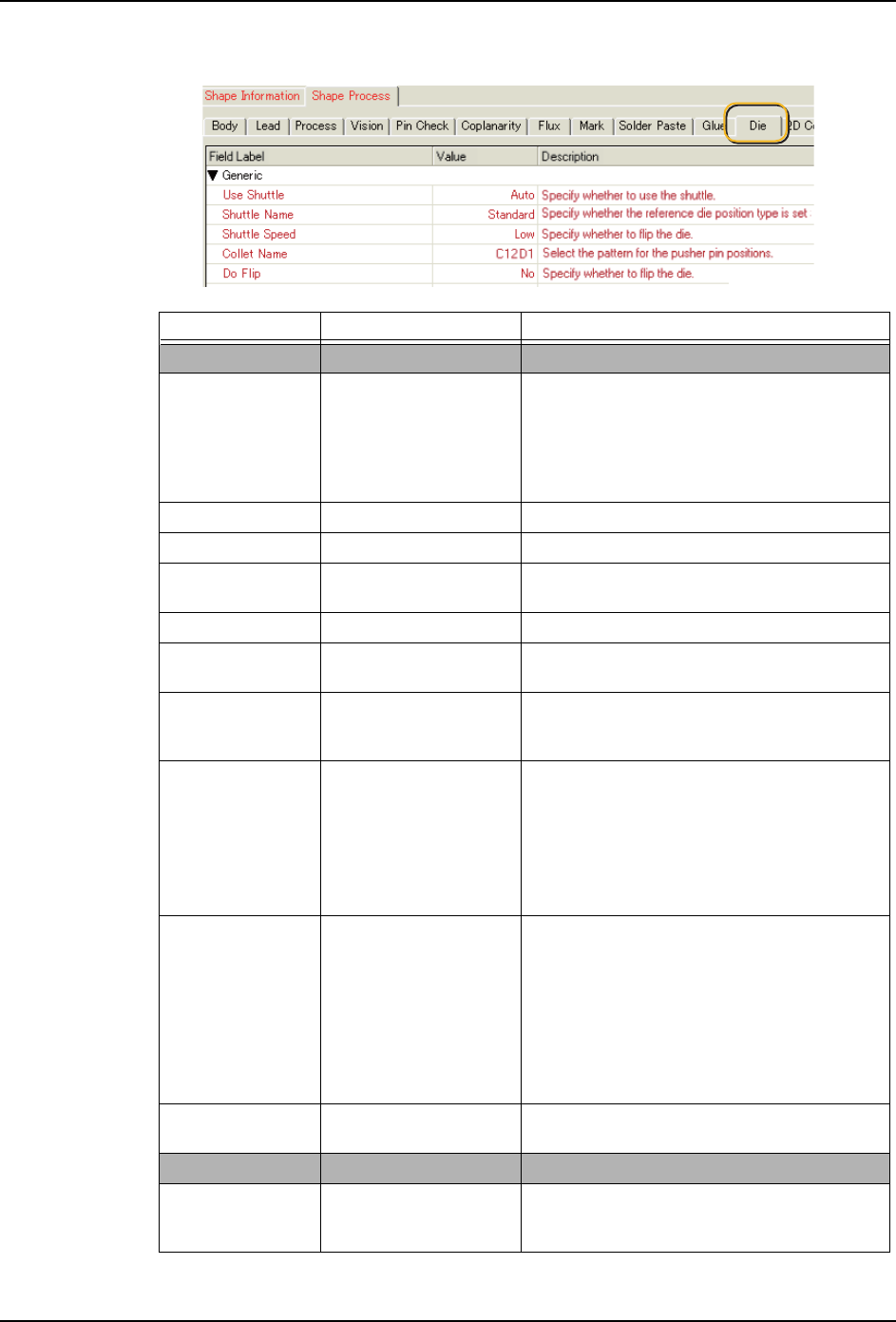
INS-NXTMWU-4.2S 5. Job 的设定和编辑 多功能晶圆单元使用说明书 77 8. 请点击 [Shape Process] 标签页内的 [Die] 标签页,设定以下的项目。 项目名 值 说明 [Geeric] Use Shuttle (Auto/ Yes/No) 设定是否使用往复臂。 A: 自动判定 (长边为 5mm 以下时,直接 供应。超出 5mm 时,往复臂供应) Y: 往复臂供应 N: 直接供应 Shuttle Na…
5. Job 的设定和编辑 INS-NXTMWU-4.2S
76 多功能晶圆单元使用说明书
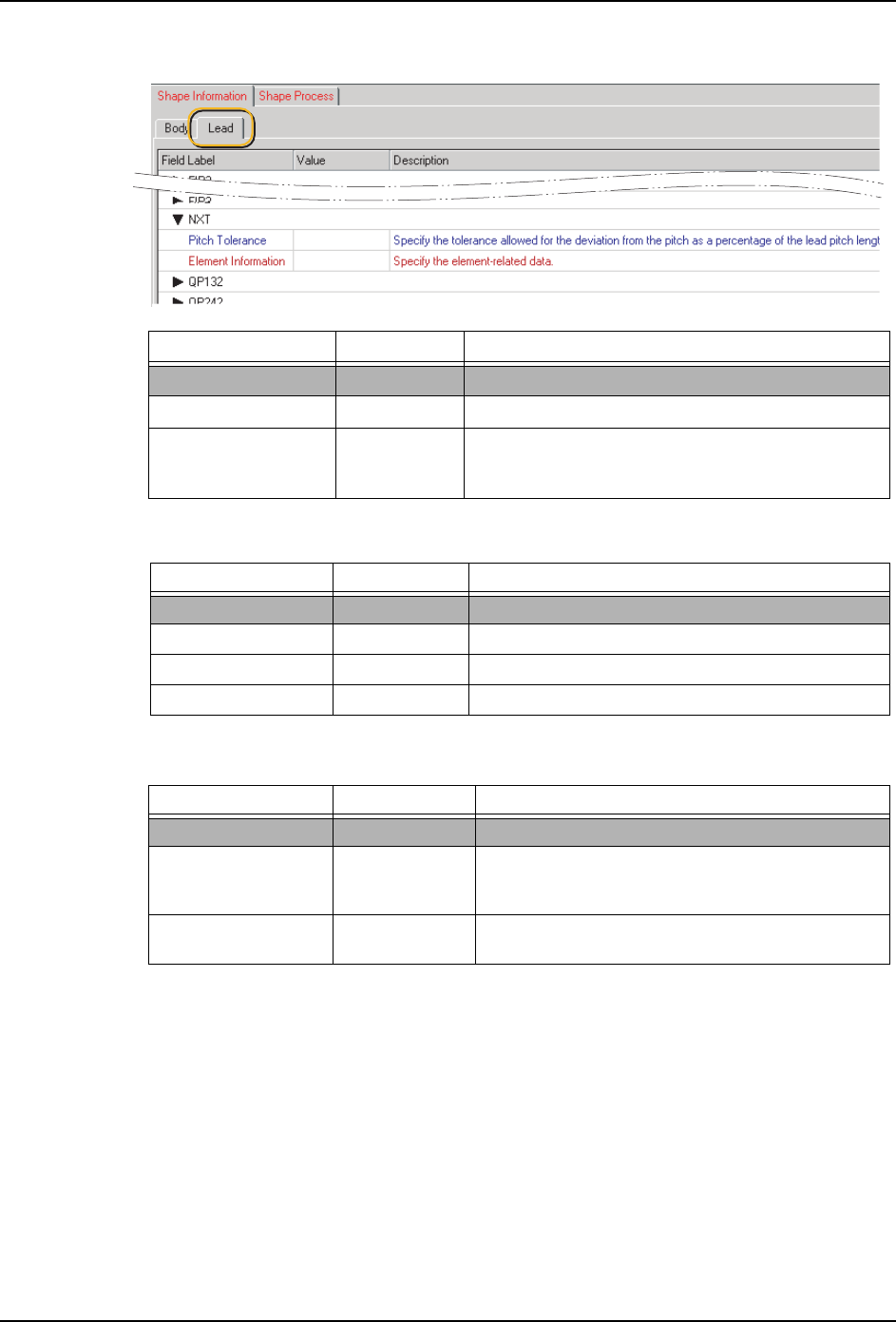
5. 点击 [Shape Information] 标签页内的 [Leed] 标签页,设定以下的项目。
6. 请点击 [Shape Process] 标签页内的 [Process] 标签页,设定以下的项目。
7. 请点击 [Shape Process] 标签页内的 [Vision] 标签页,设定以下的项目。
项目名 值 说明
{NXT]
Pich Tolerance (手工输入) 影像处理相关的设定。
Element
Information
(手工输入) 如果晶片上存在要素,请在此处进行要素的定
义。该区域内的所有设定都是影像处理相关的设
定。
项目名 值 说明
[Nozzle]
Minimum Diameter (手工输入) 指定能够吸取晶片的吸嘴的直径最小值
Maximum Diameter (手工输入) 指定能够吸取晶片的吸嘴的直径最大值
Name (手工输入) 如果是特殊吸嘴,指定吸嘴的别名
项目名 值 说明
[Geeric]
Vision Type (手工输入) 指定在处理机器侧的元件相机从晶片下面所拍
摄的影像时的算法。如果晶片的形状是四边形
时,请指定 60。
Lighting (Back/Front) 指定机器侧的元件相机从晶片下面拍摄时的照
明类型。
01NST-1399E
INS-NXTMWU-4.2S 5. Job 的设定和编辑
多功能晶圆单元使用说明书 77
8. 请点击 [Shape Process] 标签页内的 [Die] 标签页,设定以下的项目。
项目名 值 说明
[Geeric]
Use Shuttle (Auto/Yes/No) 设定是否使用往复臂。
A: 自动判定 (长边为 5mm 以下时,直接
供应。超出 5mm 时,往复臂供应)
Y: 往复臂供应
N: 直接供应
Shuttle Name (手工输入) 往复臂衬垫的指定
Shuttle Seed (Standard/Mid/Low) 往复臂速度
Collet Name (通过选择项选择) 顶起销的配置类型
( 参照 "5.3.2 补充信息 ")
Do Flip (Yes/No) 设定是否进行晶片的翻转供应
Wafer Size (通过选择项选择) 晶圆直径 ( 请对照生产中使用的晶片进行
选择。MWU8i 时,请指定 8 inch 以下。)
Ref. Die Pos
Type
(Matrix/
Coordinate/
WaferMap)
设定是否按照 Matrix、坐标或晶圆图表
进行参考晶片的位置指定。
Ref. Die Pos
Info By Matrix
[Ref. Die Pos Type]
为 Matrix 时,显示
[Exist value]。
[Ref. Die Pos Type] 项为 Matrix 的时
候,因为在数值栏显示 [Exist value],
所以请左击 [Exist value],设定参考晶
片的详细内容。
[Ref. Die Pos Type]
为 Coodinate 时,为
空白。
[Ref. Die Pos Type] 项为 Coodinate 的
时候,数值栏为空白。请左击空白栏,设
定参考晶片的坐标位置。
Reference
Operator Check
(Yes/No) Yes: 与参考影像处理处理的结果无关,
由操作者进行确认。
No: 在以下的条件下操作者不必进行确
认。
[Ref. Die Pos Type] 为 [Matrix] 或者
[Coordinate],并且相邻设定为
[Adjoin=Yes] 的时候。
First Pickup
Pos Check
(Yes/No) 进行元件补充后的晶片吸取位置确认时,
设定 Yes。
[Pressure Pin]
Push Up
Parameter Mode
(Auto/Manual) 指定顶起参数的设定方法。
指定了 [Auto] 时,只显示以下的 [Push
Up Wait Time]。
01NST-0784Ea
5. Job 的设定和编辑 INS-NXTMWU-4.2S
78 多功能晶圆单元使用说明书
Push Up Wait
Time
(0 ~ 2000) 设定顶起销上升后的停止时间
( 单位:ms)
(*) 在 Push Up Parameter Mode 中,如果选择了 [Manual] 后,还显示以下的项目。
Push Up Height (0.0 ~ 1.5) 设定通过顶起销顶起晶片的高度
Speed Change
Height
(0.00 ~ 1.50) 设定顶起参数的切换高度
1st. Lift Speed (Standard/Low1/
Low2/Low3/Low4)
指定速度切换之前的加速度
2nd. Lift Speed (Standard/Low1/
Low2/Low3/Low4)
指定速度切换之后的加速度
Low1 Rate (70 ~ 99) 设定相对于通常速度的比率 (99 ~ 70%)
Low2 Rate (40 ~ 69) 设定相对于通常速度的比率 (40 ~ 69%)
Low3 Rate (20 ~ 39) 设定相对于通常速度的比率 (20 ~ 39%)
Low4 Rate (1 ~ 19) 设定相对于通常速度的比率 (1 ~ 19%)
[Nozzle]
Name (通过选择项选择) 以别名指定从 PP 吸嘴更换器上所吸取的
吸嘴
[Pick]
Offset X (-1.50 ~ 1.50) 设定 PP 工作头吸取晶片时的 X 方向修正
值 (单位:mm)
Offset Y (-1.50 ~ 1.50) 设定 PP 工作头吸取晶片时的 Y 方向修正
值 (单位:mm)
Offset Z (-2.00 ~ 2.00) 设定 PP 工作头吸取晶片时的 Z 方向修正
值 (单位:mm)
(*) 设定了 Offset X、Y、Z 后,根据吸取位置的修正,顶起销的顶起位置也会进行
修正。
Pickup Wait
Time
(0 ~ 2000) 晶片吸取时的在下降端的停止时间 (单
位:ms)
[Place]
Do Place Check (Yes/No) 如果进行 PP 工作头的元件带回确认,则
设定 Yes。
[Vision]
Vision Type (手工输入) 指定在处理 MWU 侧的元件相机从晶片上面
所拍摄的影像时的算法
如果晶片的形状是四边形时,指定 60。
Lighting (Back/FrontA/
FrontB/FrontAB)
晶片吸取时的影像处理光源类型
Shutter Speed (0.000 ~ 1000.000) 晶片吸取时的影像处理的快门速度
Surface
Pattern Info
编辑从 Top 面看到的晶片的图形
(*) 请选择 Surface Pattern Info,并且将查找线的个数设定为 40 以下。
Vision Process
Pattern
(Auto/All Die/PP
First/Custom)
设定晶片吸取时的影像处理类型
( 参照 "5.3.2 补充信息 ")
Process Times (0 ~ 2000) 按照这里指定个数进行晶片的影像处理,
并且反映到位置补正中。
( 参照 "5.3.2 补充信息 ")
项目名 值 说明