MR8740、MR8741_user_manual_eng_20191016H.pdf - 第409页
Appendix 4 FFT Definitions A 13 Appendix What is FFT? ____ __________________ _______________ _____________ FFT is the ab breviation for Fast Four ier Transform, an efficient metho d to calcu- late the DFT (Discrete Four…
Appendix 3 About Options
A12
Application Model Description
AC/DC
The CT955x or 9318 Conversion
Cable are required for connection.
Model 9709 AC/DC Current Sensor 500 A, DC to 100 kHz
Model CT6841 AC/DC Current Probe 20 A, DC to 1 MHz
Model CT6843 AC/DC Current Probe 200 A, DC to 500 kHz
Model CT6844 AC/DC Current Probe 500 A, DC to 200 kHz
Model CT6845 AC/DC Current Probe 500 A, DC to 100 kHz
Model CT6846 AC/DC Current Probe 1000 A, DC to 20 kHz
Model CT6862 AC/DC Current Sensor 50 A, DC to 1 MHz
Model CT6863 AC/DC Current Sensor 200 A, DC to 500 kHz
Model CT6865 AC/DC Current Sensor 1000 A, DC to 20 kHz
Dedicated for AC
The CT955x or 9318 Conversion
Cable are required for connection.
Model 9272-10 Clamp On Sensor 20 A/200 A, 1 Hz to 100 kHz
Dedicated for AC
Model 9018-50 Clamp On Probe 10 A to 500 A, 40 Hz to 3 kHz
Model 9132-50 Clamp On Probe 20 A to 1000 A, 40 Hz to 1 kHz
Leakage current
Model 9657-10 Clamp On Leak Sensor 10 A AC (Leakage current, 50 Hz/60 Hz)
Others
For connecting to a module for
voltage measurement
Model CT9555, CT9556, and CT9557
Sensor Unit
For Model 9272-10, 9709, CT6841,
CT6843, CT6844, CT6845, CT6846,
CT6862, CT6863, CT6865
For connecting to the Model
8971 Current Unit
Model 9318 Conversion Cable
For Model 9272-10, 9709, CT6841,
CT6843, CT6844, CT6845, CT6846,
CT6862, CT6863, CT6865
For more information on the output rate of a clamp sensor, see the indication on each clamp sensor or the instruction manual.
Software
Application Software
9333 LAN Communicator
9335 Wave Processor
Appendix 4 FFT Definitions
A13
Appendix
What is FFT? __________________________________________________
FFT is the abbreviation for Fast Fourier Transform, an efficient method to calcu-
late the DFT (Discrete Fourier Transform) from a time-domain waveform. Also,
the reverse process of transforming frequency data obtained by the FFT back
into its original time-domain waveform is called the IFFT (Inverse FFT). The FFT
functions perform various types of analysis using FFT and IFFT.
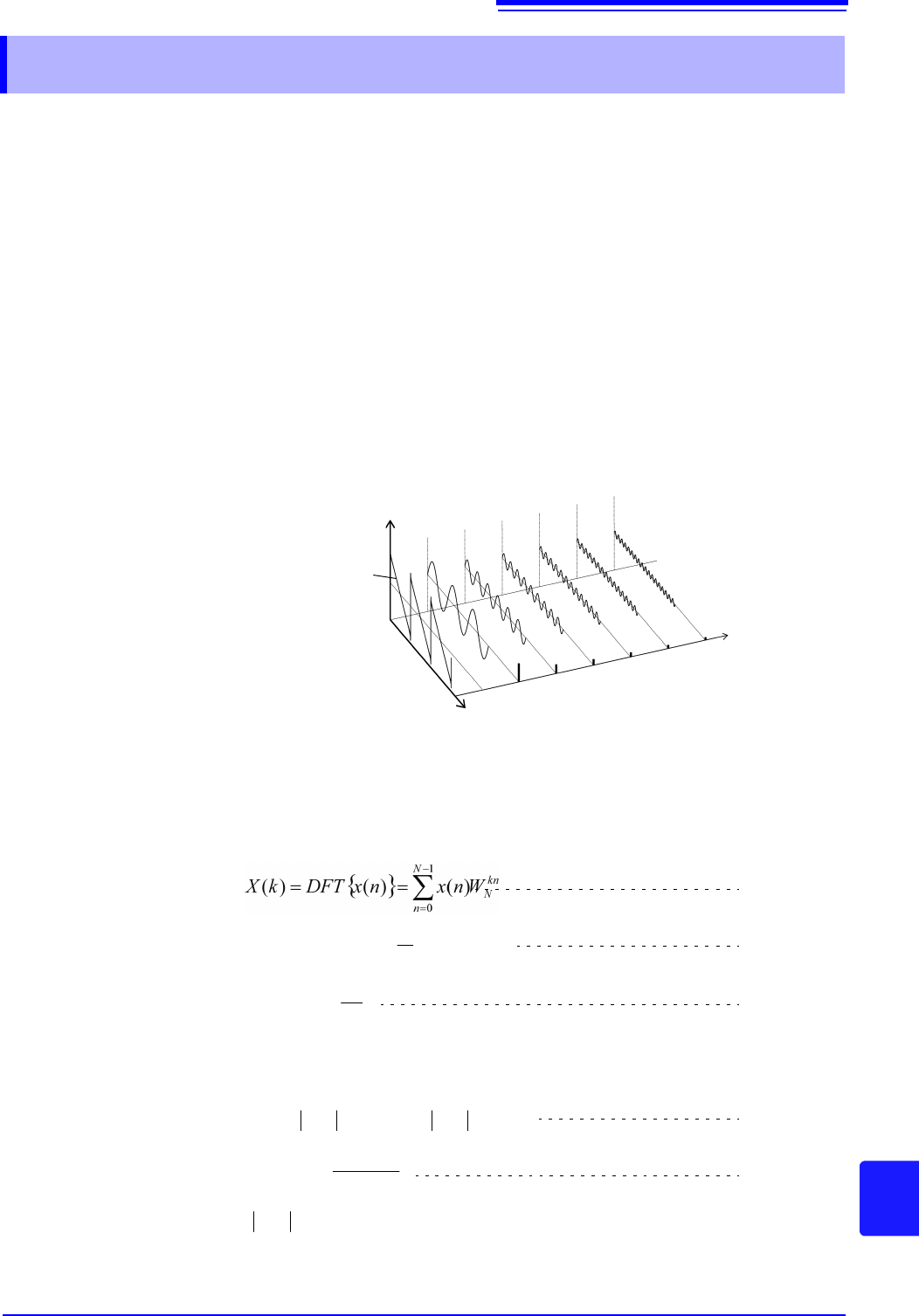
Time and Frequency Domain Considerations _______________________
All signals are input to the instrument as a function of the time domain. This func-
tion can be considered as a combination of sine waves at various frequencies,
such as in the following diagram. The characteristics of a signal that may be diffi-
cult to analyze when viewed only as a waveform in the time domain can be eas-
ier to understand by transforming it into a spectrum (the frequency domain).
Discrete Fourier Transforms and Inverse FFT _______________________
For a discrete signal x(n), the DFT is X(k) and the number of Analysis points is N,
which relate as follows:
X(k) is typically a complex number, so expression (1) can be transformed again
and written as follows:
Appendix 4 FFT Definitions
Amplitude
Frequency
Time
Time-Domain
Waveform
(1)
kn
N
N
n
WkX
N
kXIDFTnx
1
0
)(
1
)()(
N
jW
N
2
exp
(2)
(3)
(4)
(5)
)()()(exp)()( kkFkjkFkF
)(Re
)(Im
tan)(
1
kX
kX
k
: Amplitude spectrum, : Phase spectrum
)(kF
)(k
Appendix 4 FFT Definitions
A14
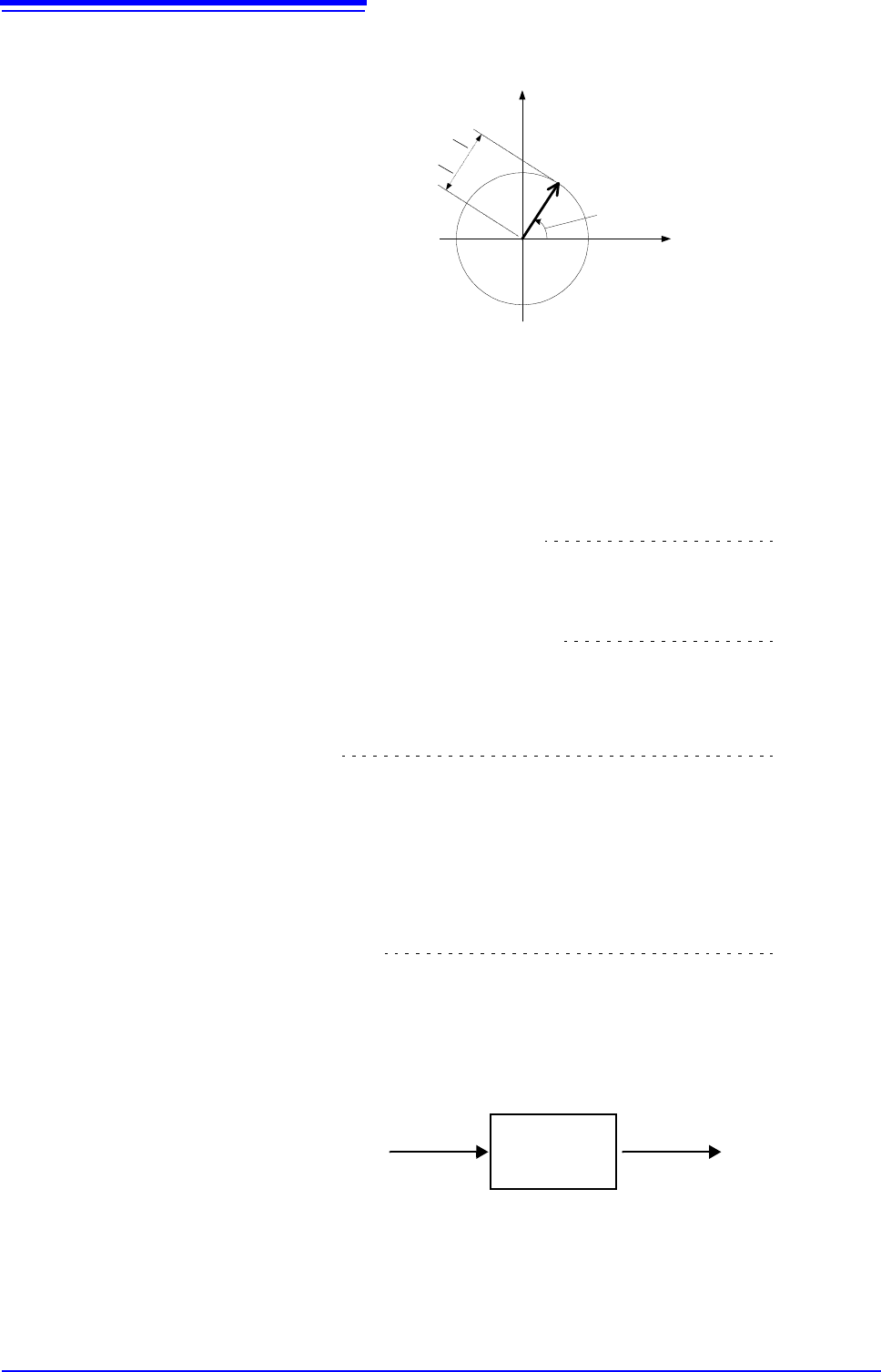
Representing the above relationship on a complex flat surface produces the fol-
lowing figure.
Linear Time-Invariant Systems __________________________________
Consider a linear time-invariant (LTI) system y(n) that is a response to discrete
time-domain signal
x(n).
In such an LTI system, the following expression applies to any integer A
i
when
the response to x
i
(n) is y
i
(n) = L[x
i
(n)].
If the system function of an LTI system is h(n), the input/output relationship can
be obtained by the next expression.
Therefore, when a unit impulse (n) (which is 1 when n = 0, and 0 when n 0) is
applied to x(n), the input/output relationship is:
This means that when the input signal is given as a unit impulse, the output is
the LTI system characteristic itself.
The response waveform of a system to a unit impulse is called the impulse
response.
On the other hand, when the discrete Fourier transforms of x(n), y(n) and h(n) are
X(k), Y(k) and H(k), respectively, expression (7) gives the following:
H(k) is also called the transfer function, calculated from X(k) and Y(k). Also, the
inverse discrete Fourier transform function of H(k) is the unit impulse response
h(n) of the LTI system. The impulse response and transfer function of this instru-
ment are calculated using the relationships of expression (9).
)(kF
)(k
)
(
k
F
実数部
虚数部
Imaginary component
Real component
)()()]()([
22112211
nyAnyAnxAnxAL
(6)
(7)
mm
mxmnhmnxnhny )()()()()(
0
(8)
)()( nhny
(9)
)()()( kHkXkY
Input
(Analysis channel 1)
Output
(Analysis channel 2)
x(n)
X(k)
y(n)
Y(k)
h(n)
H(k)
LTI System