KJ-01.02.Instruction Manual.REV.02.pdf - 第135页
5 − 39 ② Setting when a component is centered with vision Item Descri ption Whether this item is measured automaticall y with the measurement comman d: 1 Retry times Specif y how many retry operat ion is t o be perform e…
5 − 38
(3) Extension setting items
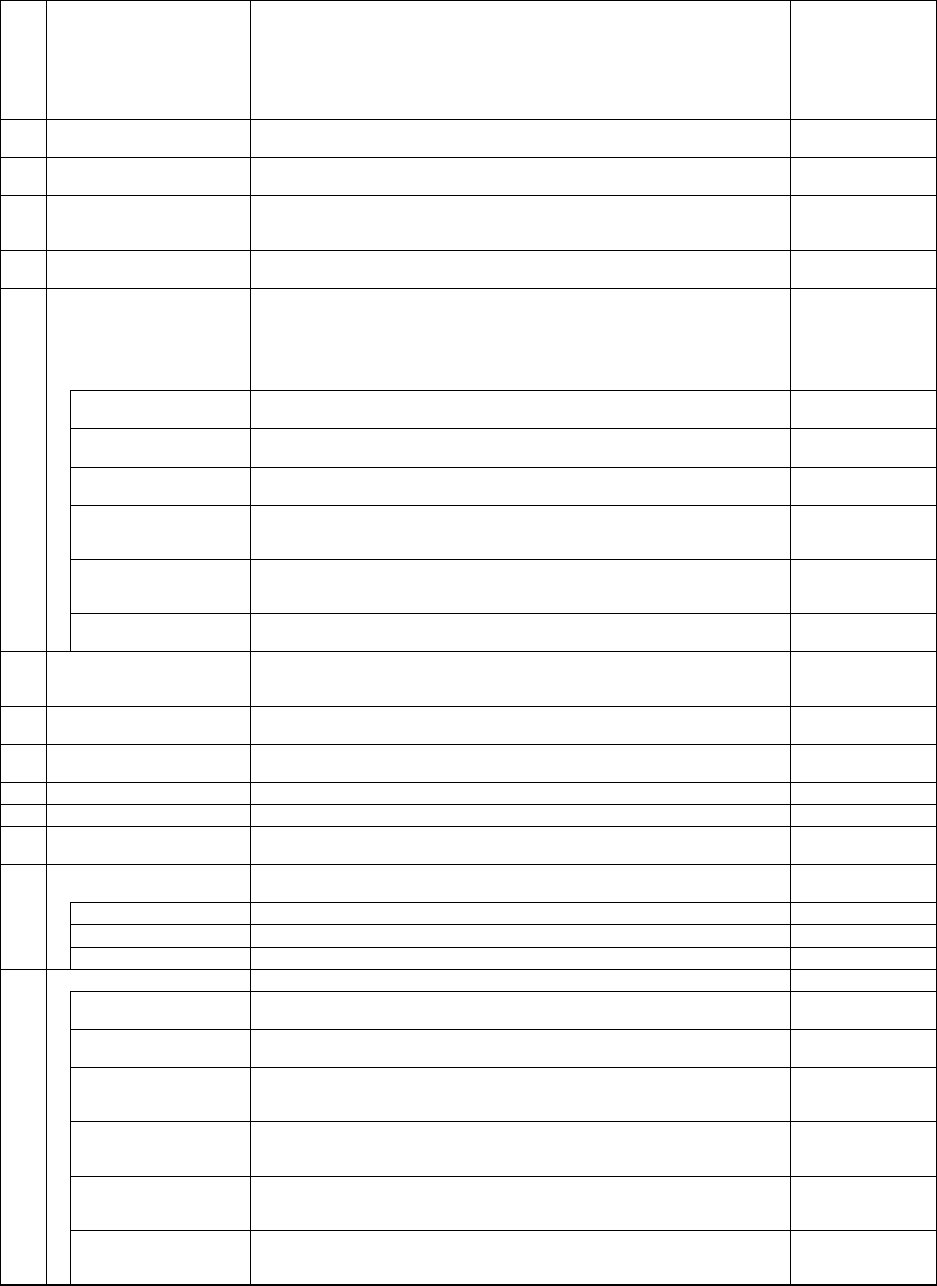
① Setting when a component is centered with laser
Item Description
Whether this
item is
measured
automatically
with the
measurement
command:
1 Retry times
Specify how many retry operation is to be performed when a component
pick-up error occurs.
2 Placing stroke
Specify how much the machine should push a component from the top
side of a board when it places the component on the board.
3 Picking stroke
Specify the pick stoke to be added to automatically calculate the Z height
of the component pick-up position. This value is used to correct
deviation of the depth of grooves of embossed tape.
4 Trial
Specify whether the machine actually places a component on a board
during trial production.
Speed Specify the XY-axis speed, Z-axis speed and theta-axis speed applied
from start of pick-up to placement of a component.
For the XY-axis speed, select which factor is given the higher priority,
placement precision or placement cycle time.
For the Z-axis speed, the specified value is used to adjust the stress
given to a component when it bounces, drops or is placed on a board.
XY speed Specify the acceleration of the XY-axis when it moves to the component
placement position after a component is picked up.
Picking Z down Specify the acceleration of the Z-axis when it moves down to the
component pick-up position (to prevent a component from bouncing).
Picking Z up Specify the acceleration of the Z-axis when it moves up to the
component pick-up position (to prevent a component from dropping).
Placing Z down Specify the acceleration of the Z-axis when it moves down to the
component placement position (to adjust the stress given to a
component).
Placing Z up Specify the acceleration of the Z-axis when it moves up to the
component placement position (to prevent a component from being
picking up again).
5
Theta speed Specify the acceleration of the theta axis (to prevent a component from
rotating to the wrong position).
6
Compo. aband.
(Component
abandonment)
Specify where to discard a component.
7
Placing offset X Specify the placement offset for unsymmetrical components in the X
direction.
8
Placing offset Y Specify the placement offset for unsymmetrical components in the Y
direction.
9 Laser position Specify the offset from the top side of a component to the laser side.
10 Laser algorithm Specify the algorithm for recognizing a component with laser. YES
11
Release check Specify whether to use the LA to check if a component is not attached to
a nozzle after the machine places it.
Tombstone det.
(Detection)
Specify whether to check to see if a component stands on its side when
the machine checks component pick-up operation.
Acceptable W. (width) Specify the width of a component that is judged to stand on its side.
Acceptable L. (length) Specify the length of a component that is judged to stand on its side.
12
Acceptable H. (height) Specify the height of a component that is judged to stand on its side.
Dimension check Specify whether to perform a dimension check.
Std. Size W.
(Standard size width)
Specify the width of a component that is used to check a dimension as
guideline.
Std. Size L. (Standard
size length)
Specify the length of a component that is used to check a dimension as
guideline.
W. Judge Max. (Width
judgment maximum
level)
Specify the upper limit of the ratio to the standard width to judge whether
a dimension of a component is correct or not.
W. Judge Min (Width
judgment maximum
level)
Specify the lower limit of the ratio to the standard width to judge whether
a dimension of a component is correct or not.
L. Judge Max (Length
judgment maximum
level)
Specify the upper limit of the ratio to the standard length to judge
whether a dimension of a component is correct or not.
13
L. Judge Min (Length
judgment minimum
level)
Specify the lower limit of the ratio to the standard length to judge whether
a dimension of a component is correct or not.
* The current version of the machine (1.10) cannot perform the component dimension check.
5 − 39
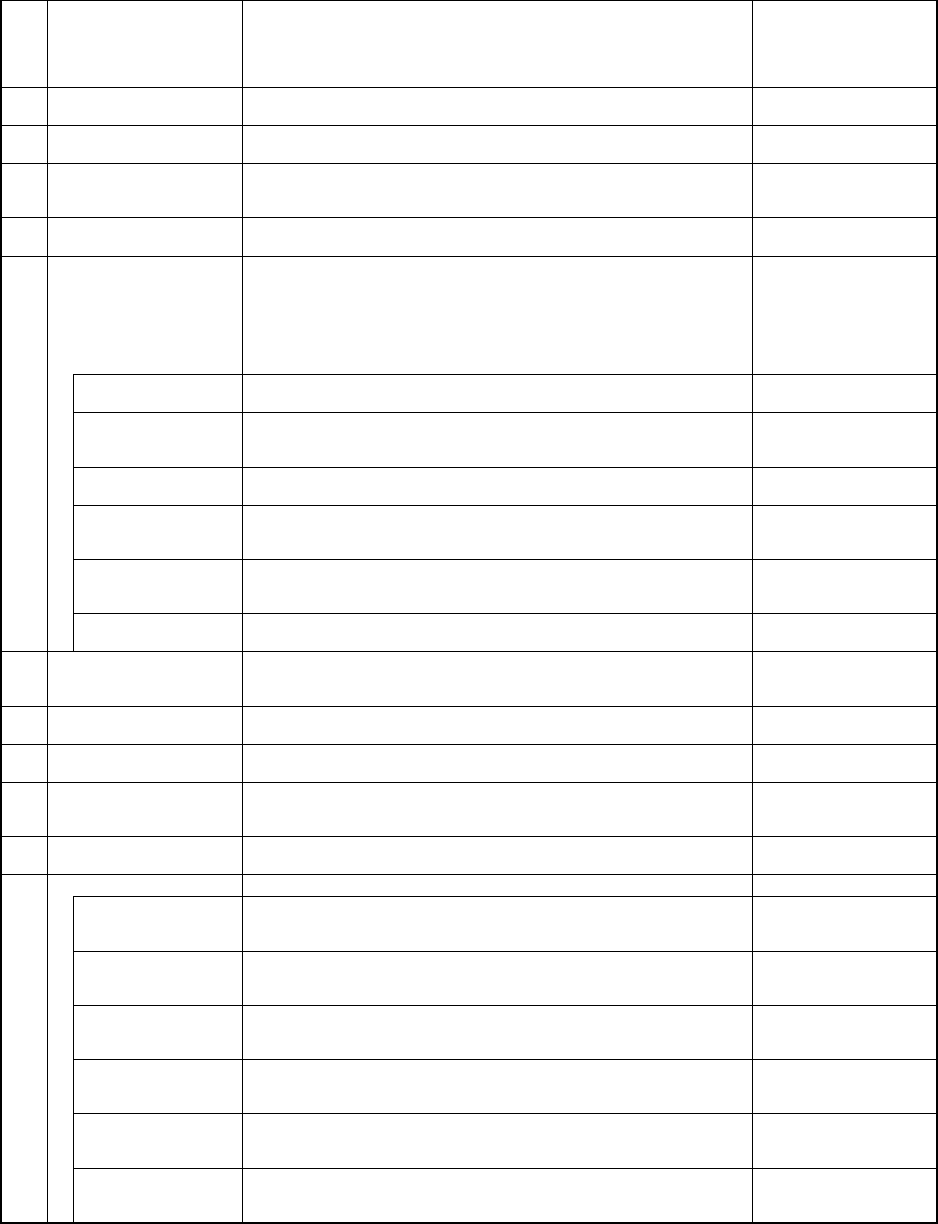
② Setting when a component is centered with vision
Item Description
Whether this item is
measured
automatically with
the measurement
command:
1 Retry times
Specify how many retry operation is to be performed when a
component pick-up error occurs.
2 Placing stroke
Specify how much the machine should push a component from the
top side of a board when it places the component on the board.
3 Picking stroke
Specify the pick stoke to be added to automatically calculate the Z
height of the component pick-up position. This value is used to
correct deviation of the depth of grooves of embossed tape.
4 Trial
Specify whether the machine actually places a component on a
board during trial production.
Speed Specify the XY-axis speed, Z-axis speed and theta-axis speed
applied from start of pick-up to placement of a component.
For the XY-axis speed, select which factor is given the higher
priority, placement precision or placement cycle time.
For the Z-axis speed, the specified value is used to adjust the stress
given to a component when it bounces, drops or is placed on a
board.
XY speed Specify the acceleration of the XY-axis when it moves to the
component placement position after a component is picked up.
Picking Z down Specify the acceleration of the Z-axis when it moves down to the
component pick-up position (to prevent a component from
bouncing).
Picking Z up Specify the acceleration of the Z-axis when it moves up to the
component pick-up position (to prevent a component from dropping).
Placing Z down Specify the acceleration of the Z-axis when it moves down to the
component placement position (to adjust the stress given to a
component).
Placing Z up Specify the acceleration of the Z-axis when it moves up to the
component placement position (to prevent a component from being
picking up again).
5
Theta speed Specify the acceleration of the theta axis (to prevent a component
from rotating to the wrong position).
6
Compo. aband.
(Component
abandonment)
Specify where to discard a component.
7
Placing offset X Specify the placement offset for unsymmetrical components in the X
direction.
8
Placing offset Y Specify the placement offset for unsymmetrical components in the Y
direction.
9 Picking depth
If the top side of a component (component height: t) is located at a
higher level than the side the machine is to pick because its shape is
concave and its sides protrude, enter the offset value.
10
Recog. offset
(recognition offset)
Enter the offset from the nozzle component pick-up point to the
recognition center point.
Dimension check Specify whether to perform a dimension check.
Std. Size W.
(Standard size
width)
Specify the width of a component that is used to check a dimension
as guideline.
Std. Size L.
(Standard size
length)
Specify the length of a component that is used to check a dimension
as guideline.
W. Judge Max.
(Width judgment
maximum level)
Specify the upper limit of the ratio to the standard width to judge
whether a dimension of a component is correct or not.
W. Judge Min
(Width judgment
maximum level)
Specify the lower limit of the ratio to the standard width to judge
whether a dimension of a component is correct or not.
L. Judge Max
(Length judgment
maximum level)
Specify the upper limit of the ratio to the standard length to judge
whether a dimension of a component is correct or not.
11
L. Judge Min
(Length judgment
minimum level)
Specify the lower limit of the ratio to the standard length to judge
whether a dimension of a component is correct or not.
* The current version of machine cannot support the dimension check function.
* The KJ-01 cannot support the vision centering method..
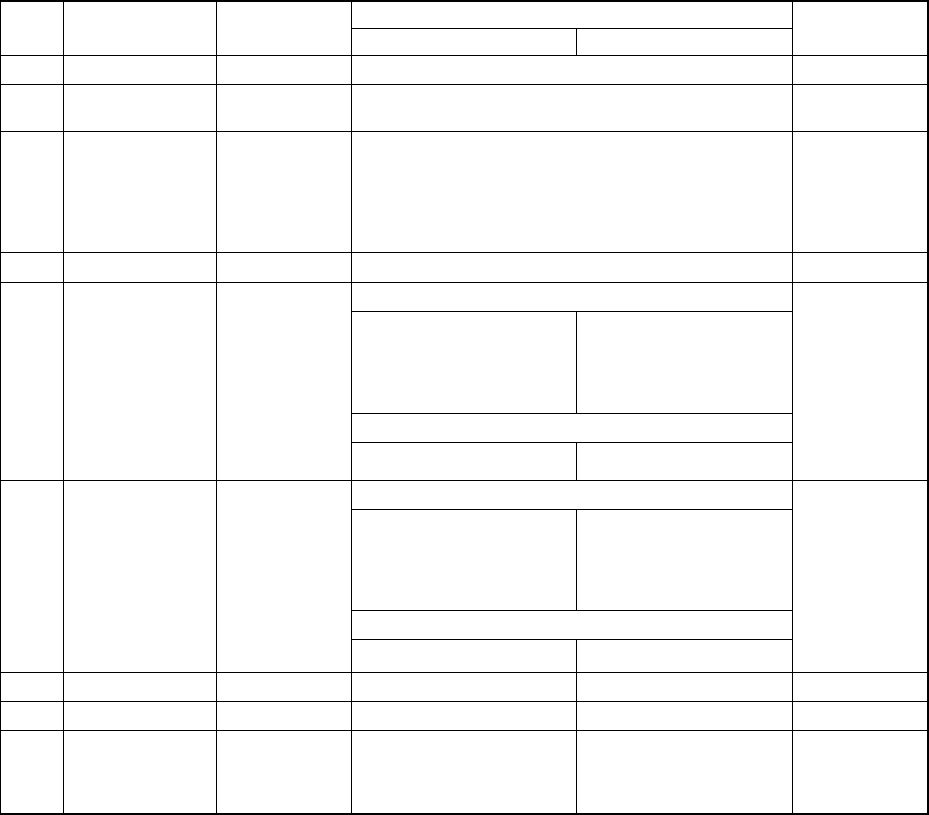
5 − 40
Table 5.5.2 Component data setting range
(1) Component data basic setting items
Available setting range
Displayed item Description
Minimum value Maximum value
Teaching
1 Comment None 30 characters or less Not available
2
Component
packaging
None
Either of Tape, Stick, Tray or Bulk
Not available
3 Component type None
Square chip, MELF, aluminum electrolytic capacitor, SOT,
SOP, SOP with a heat sink, SOJ, QFP, PLCC (OFJ),
PQFP (BQFP), TSOP, TSOP2, BGA, network resistor,
trimmer, unidirectional lead connector, bi-directional lead
connector, Z-lead connector, J-lead socket, gull-wing
socket, socket with a bumper, or other components
Not available
4 Centering method Laser centering Either of Laser centering or Vision centering Not available
For laser centering method
0.30 mm
(When you enter “0.30 mm”,
the minimum length of a
component becomes 0.60
mm.)
20.00 mm
(Only when the component
length is 11.0 mm or less,
you can enter up to 23.5
mm.)
For vision centering method
5
Component width
None
3.00mm 24.00mm
Not available
For laser centering method
0.30 mm
(When you enter “0.30 mm”,
the minimum width of a
component becomes 0.60
mm.)
20.00 mm
(Only when the component
width is 11.0 mm or less,
you can enter up to 23.5
mm.)
For vision centering method
6 Component length None
3.00mm 24.00mm
Not available
7 Component height None 0.10mm 12.00mm Not available
8 Nozzle number None 500 999 Not available
9
Pick vacuum
pressure
Automatically
set according to
the nozzle
number.
-760.00mmHg 0.00mmHg Not available
*
The KJ-01 can support the laser centering method only.
*
By default, you can specify nozzles whose numbers are from 501 to 508. If you
want to specify another number nozzle, install it with the [Nozzle data installation]
command on the Machine setup screen.