KJ-01.02.Instruction Manual.REV.02.pdf - 第24页
1 − 8 1.1.4 Mechanical specifications • Placement accuracy The f ollowing table lists t he placement accuracy data f or diff erent types of components. A poorer accur acy results depending on the com ponents that m ay ha…
1 − 7
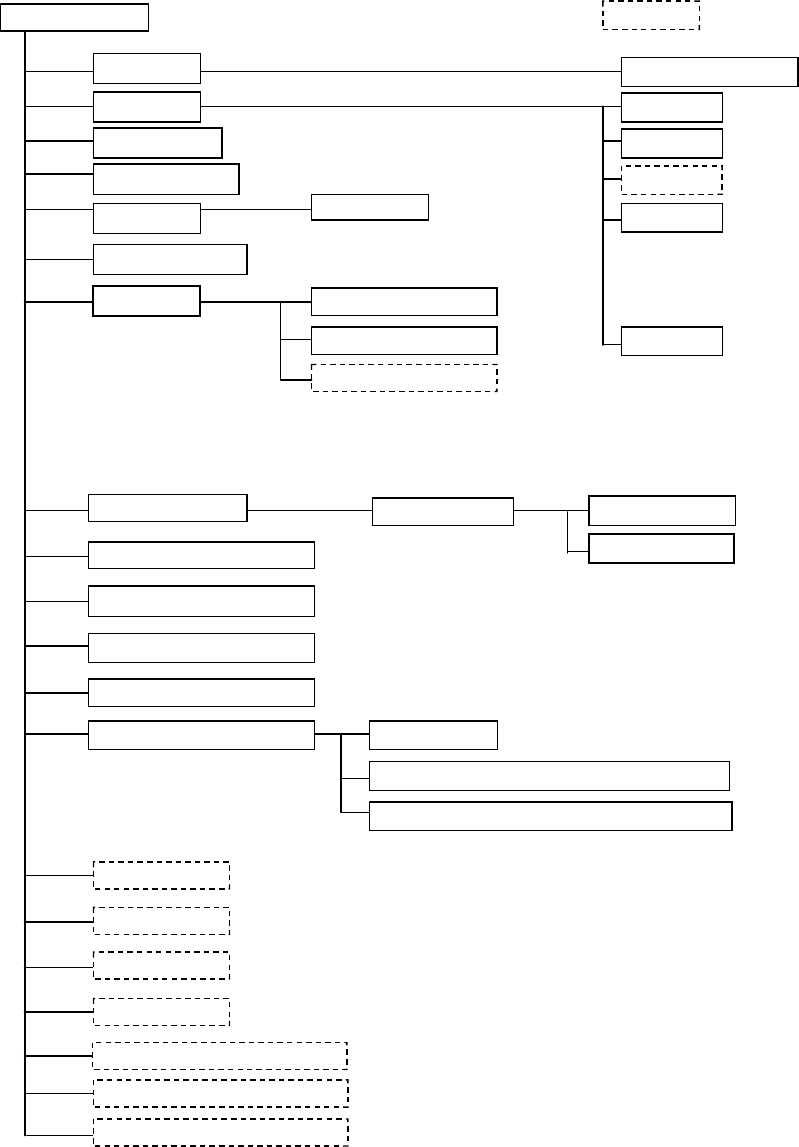
1.1.3.2
Signal tower
Emergency stop button
Placing head
Placement station
Tape feeder
Stick feeder
IC collection belt
Bulk feeder
KJ-02
Optional
Pin reference
Shape clamp
Laser recognition head
Bad mark reader
Offset correction camera
Power unit
CPU board
I/O control CPU
Motor control unit
Cabinet
X-Y positioning unit
CRT display
Keyboard
Track ball
FDD
Area sensor
Automatic tool changer (ATC)
Feeder float detecting function
Pneumatic piping system
Vision Centering System (VCS)
Feeder bank driver
PWB conveyor unit
Matrix tray holder
Calibration block (Maintenance tool)
External Programming Unit (EPU)
Vision monitor
Component-recognizing camera(24 x 24mm)
Large component-recognizing camera (50 x 50mm)
*
1
*
1
*1:Choose one of these Cameras
1 − 8
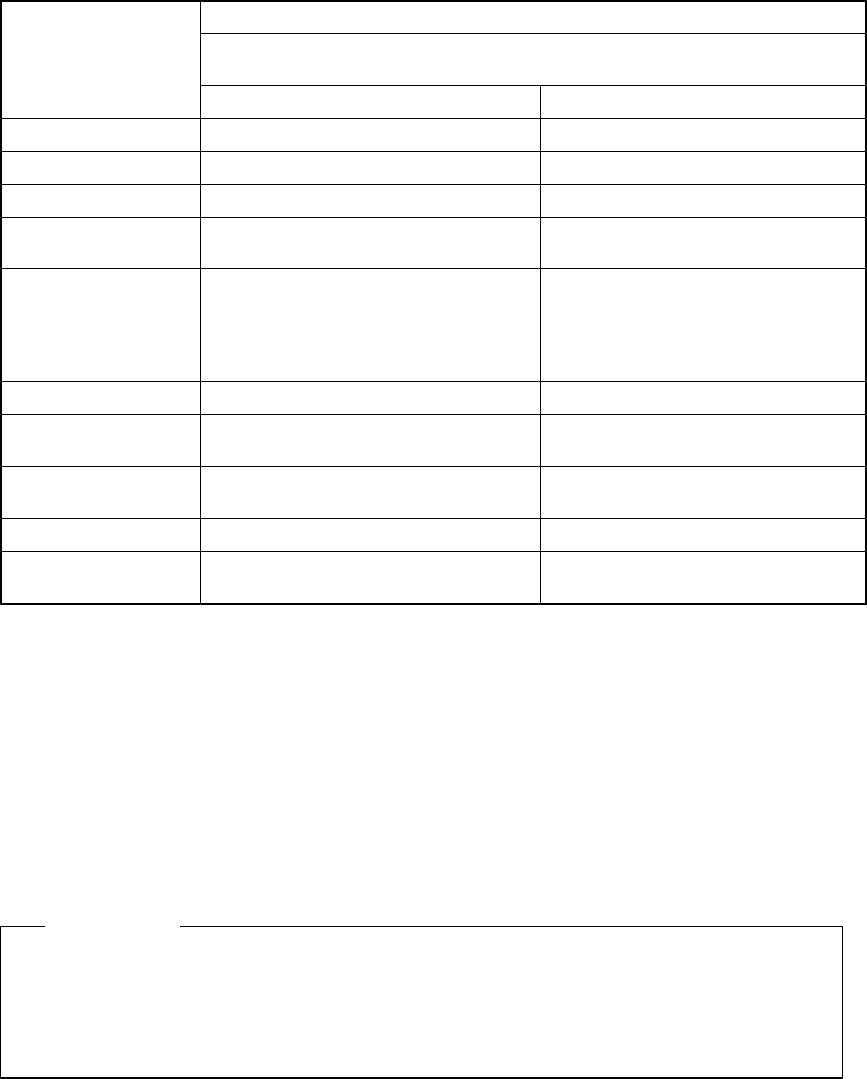
1.1.4 Mechanical specifications
• Placement accuracy
The following table lists the placement accuracy data for different types of
components. A poorer accuracy results depending on the components that may
have an edge or plastic mold burrs at the area detected with the laser align
function, and that may have a moving part to be detected with respect to the pick
port.
Table 1.1.4.1
KJ-01/02
LAHD heads (Laser recognition correction)
Component size: 20 mm x 20 mm or less, or 23.5 mm x 11 mm or less
Component type
Position (X, Y) Unit: (mm)
Posture (theta) Unit: (°)
Square chip
± 0.08 ± 3
MELF
± 0.1
± 3
SOT
± 0.15
± 3
Aluminum
electrolytic capacitor
± 0.3 ± 10
SOP ± 0.15 in the right angle direction
against the lead
(Burr on one side: 0.15 or less)
±0.2 in the direction parallel to the
lead
± 3
PLCC
± 0.2
± 0.3
QFP, TSOP
(Pitch: 0.8 or more)
± 0.12
± 0.3
QFP, TSOP
(Pitch: 0.65)
± 0.08
± 0.3
BGA ± 0.2
± 0.3
Other large-size
components
± 0.3
−
• Placement cycle time
The optimized placement cycle time is shown below. The cycle time required
when a component is placed on a board actually varies depending on the board
size or how many times a nozzle is replaced.
Small chip component
4,000 components/hour 0.9 seconds/component)
This cycle time is calculated with supposition that the machine picks up a
component from an 8-mm tape feeder and places it on a board at 180 degrees,
and the distance from the component pick-up point to the placement point is 80
mm or less.
[Definition]
1 − 9
• Least input placement angle increment
Programmable placement angle setting unit: 0.05°
• Automatic tool changer (ATC)
The ATC can accommodate up to 4 nozzles.
• Transport rail height
900 mm ± 20 mm
• Machine dimensions and mass
W : 698 mm
800 mm (including PWB transfer unit)
D : 735 mm
934 mm (including keyboard)
H : 1300 mm
(height of the main unit when the PWB transfer height is 900 mm)
1584 mm
(height of the vision monitor when the PWB transfer height is 900 mm)
2000 mm
(height of the signal tower when the PWB transfer height is 900 mm)
Mass: 360 kg
• Air requirements
Air pressure : 0.49 ± 0.05 Mpa
Air consumption :60 L/min.
Dry air : Atmospheric dew point -17°C or lower
• Country of manufacturing
Manufactured in Japan
• Environmental conditions
Operating
Ambient temperature: +10° C to +35° C
Relative humidity: 50% or less (at 35° C)
90% or less (at 20° C)
Transport and storage
Temperature: -25° C to +70° C
Relative humidity: 20% to 95% (No condensation)