KJ-01.02.Instruction Manual.REV.02.pdf - 第251页
7 − 1 CHA PTER 7 TEA CHING 7.1 Functions There are t wo types of teaching ; one is f or coordinates and t he other f or r ecognition. (1) Coordinat es teaching ① T aught devices and teaching items T he device names which…
6 − 46
6.6 Menu commands
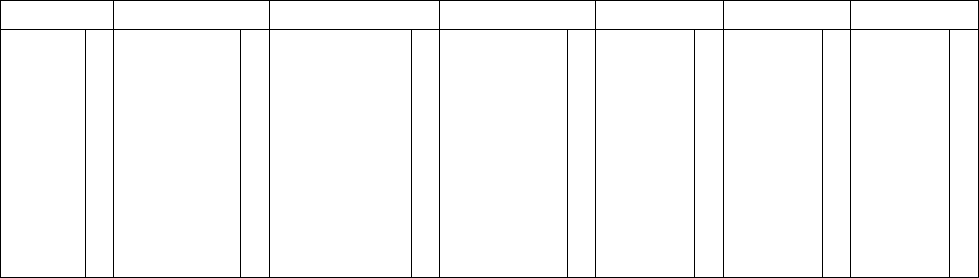
The following table lists the menu commands available from the Pickup data editing
Table 6.4.3.1
Pickup
data menu commands
1/File
2/Edit 3/Chng 4/Dspl 5/Cnvr 6/Meas. 9/Exit
1/Open...
2/Save
3/New...
4/Save as...
9/Exit
○
○
○
○
○
1/Copy 2/Delete
2/Delate
3/Move
4/Insert
5/Duplicate
6/Jump
7/Find
8/Vision copy
9/Nozzle sort
A/Component name
B/Pick point recalc
C/Mark database
×
×
×
×
×
×
×
×
×
×
×
×
1/PWB data
2/Placement data
3/Component data
4/Pickup data
5/Vision data
6/Data compl. state
○
△
△
×
○
○
1/Component form
2/Component list
3/Pick input
4/Feeder order
5/ Vision List
6/ Vision Form
×
×
×
×
△
△
1/PWB load
2/PWB eject
3/BOC align
○
○
○
1/Single
measurement
×
9/Exit
○
○: Available △: Available dependent on conditions ×: Unavailable
6.6.1 File menu
The same as the PWB data.
6.6.2 Edit menu
No command is available.
6.6.3 Chng (Change) menu
The operation is the same as that for “Data change” of PWB data.
6.6.4 Dspl. (Display) menu
No command is available.
6.6.5 Cnvr. (Conveyor) menu
This command loads and unloads the PWBs.
The operation is the same as that for “PWB transport” of PWB data.
6.6.6 Meas. (Measurement)
No command is available.
6.6.7 Exit
The same as the production end.
7 − 1
CHAPTER 7 TEACHING
7.1 Functions
There are two types of teaching; one is for coordinates and the other for recognition.
(1) Coordinates teaching
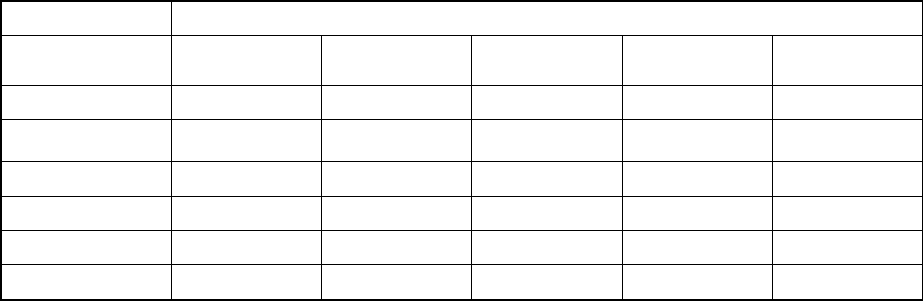
① Taught devices and teaching items
T he device names which can be taught and the teaching items are shown
below. Note that the device names which are options and not installed and
those designated as “Not to be used” for the machine setup cannot be
selected.
Table 7.1.1 KJ-01/02 teaching device and teaching item
Teaching device
Teaching coordinates (
○
)
X/Y coordinates Z coordinates
θ coordinates
Vacuum pressure
Mark recognition
parameter
LA head
○ ○ ○ ○
LAIC head
○
K
○ ○
Bad mark sensor
○
OCC camera
○
○
OCC2 camera
○
HMS
○
The POINT SEL key of the HOD is used to teach two points, and is enabled when you
select the camera and bad mark sensor as the teaching device. Note that this key is
appropriate to use a camera to teach a point. The 1POINT key is used by default
when you select a teaching device.
If you select another teaching device while the machine is teaching coordinates, the
device newly selected moves to the coordinates that the current device points to.
This allows you to change the teaching device.
7 − 2
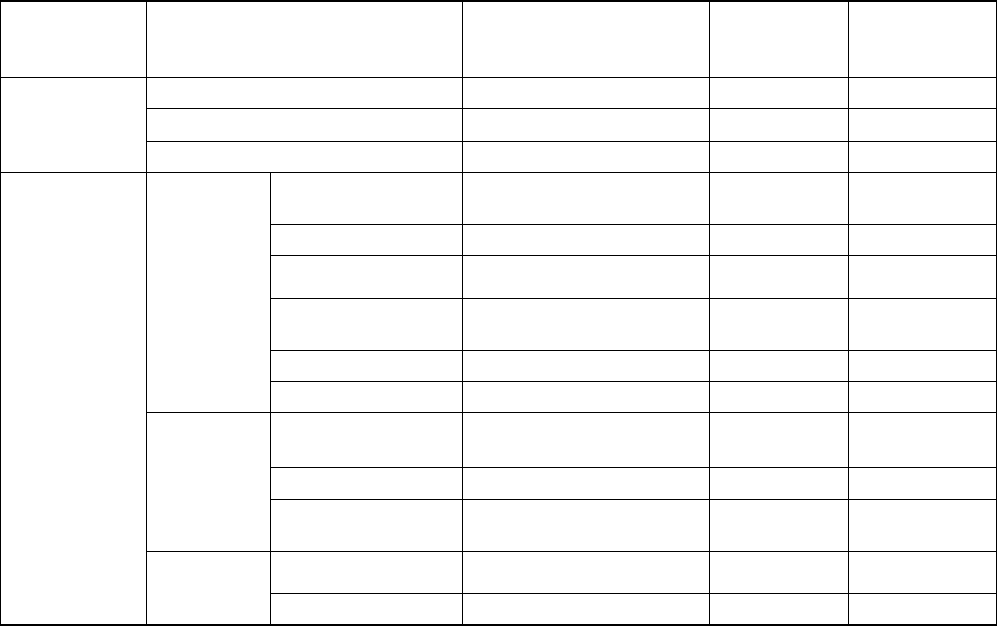
(2) Teaching item details
Table 7.1.2 KJ-01/02 Teaching items
Mode during
teaching
Input data item Data origin
Corrected by
Boc alignment
Corrected by
Feeder bank
recognition
Reference pin position XY coordinates origin
Shape clamp position XY coordinates origin
Machine setup
Component scrap position XY coordinates origin
PWB reference Reference pin position or
shape clamp position
K
Frist circuit position Board reference position
BOC mark position Board reference position
BOC mark recognition
parameter
Bad mark position
PWB data
PWB height
Placement position
IC mark position
Placement
data
IC mark recognition
parameter
Pick position XY
K
Production
program
Pick data
Pick position Z