KE-2070_使用说明书.pdf - 第75页
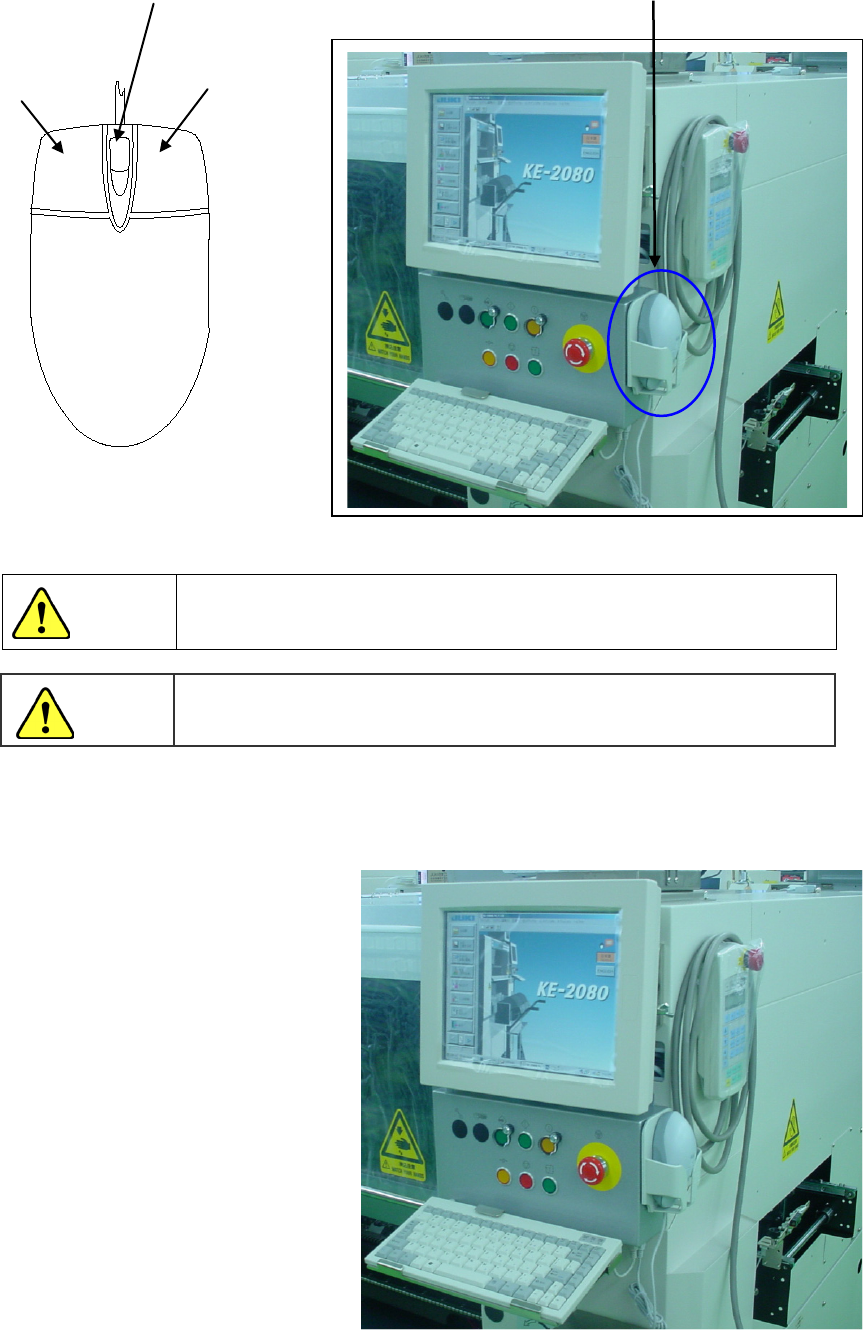
第 1 部 基本编 第 1 章 设备概要 1- 57 1-3-2-3 鼠 标器 主机的标准装备 带有鼠标器。 图 1-3-2-3 鼠标概况图 在生产或预热等连续运行 时,请把鼠标等放在鼠标 袋里。否则,运行 中鼠标可能掉落下 来。 1-3-2-4 触摸屏(选购项) 选购后 , 可进行触摸屏操作。 左按钮 右按钮 画面滚动轮 不使用鼠标时可 挂放在此处 鼠标袋 请勿在接通主机电 源的状态下插拔鼠标 电缆。 注意 注意
第 1 部 基本编 第 1 章 设备概要
1-56
表 1-3-2-2 HOD 键一览表
键名
功
能
HMS
·通过高度传感器来获得吸取高度。
(选择后
LED
灯亮。)
HEAD
·用贴片头示教时使用。
(选择后
LED
灯亮。)
CAMERA
·用 OCC 示教时使用。
(选择后
LED
灯亮。)
VACUUM
·用于示教真空压。
(选择后
LED
灯亮。)
F1
·选择其他移动目标位置、以及指定示教点数等。
F2
F3
F4
No
·升降数字,选择所需轴号。
指定液晶显示的轴号。
DEV.NAME
·升降数字,选择所需装置。
指定液晶显示的装装置号。
-X+Y
<选择 XY 时> 用于向箭头方向移动 XY 轴。
<
选择
CAMERA
时
>
用于向箭头方向移动光标。
+Z+Y
<
选择
XY
时
>
用于向箭头方向移动
XY
轴。
<选择 CAMERA 时> 用于向箭头方向移动光标。
<
选择
Z
轴时
>
用于向箭头方向移动
Z
轴。
+X+Y
<选择 XY 时> 用于向箭头方向移动 XY 轴。
<选择 CAMERA 时> 用于按箭头方向移动光标。
-θ-X
<
选择
XY
时
>
用于向箭头方向移动
XY
轴。
<选择 CAMERA 时> 用于向箭头方向移动光标。
<
选择
θ
轴时
>
用于向任意角度移动θ轴。
FAST
用于高速移动轴时。
(
如选中
,LED
将被点亮。
)
+θ+X
<选择 XY 时> 用于向箭头方向移动 XY 轴。
<选择 CAMERA 时> 用于向箭头方向移动光标。
<
选择θ轴时
>
用于向任意角度移动θ轴。
-X-Y
<选择 XY 时> 用于向箭头方向移动 XY 轴。
<选择 CAMERA 时> 用于向箭头方向移动光标。
-Z-Y
<
选择
XY
时
>
用于向箭头方向移动
XY
轴。
<选择 CAMERA 时> 用于向箭头方向移动光标。
<
选择
Z
轴时
>
用于向箭头方向移动
Z
轴。
+X-Y
<选择 XY 时> 用于向箭头方向移动 XY 轴。
<
选择
CAMERA
时
>
用于向箭头方向移动光标。
WINDOW
·用于将显示于视频监视器上的光标从十字状态切换到视窗状态。
PREVIOUS
·用于移动至上一个数据。
PAUSE
·用于暂停贴片跟踪。
CANCEL
·用于取消示教时输入的数据。
NEXT
·用于移动至下一个数据。
ENTER
·用于确定示教时输入的数据。
第 1 部 基本编 第 1 章 设备概要
1-57
1-3-2-3 鼠标器
主机的标准装备带有鼠标器。
图 1-3-2-3 鼠标概况图
在生产或预热等连续运行时,请把鼠标等放在鼠标袋里。否则,运行
中鼠标可能掉落下来。
1-3-2-4 触摸屏(选购项)
选购后,可进行触摸屏操作。
左按钮
右按钮
画面滚动轮
不使用鼠标时可挂放在此处
鼠标袋
请勿在接通主机电源的状态下插拔鼠标电缆。
注意
注意
第 1 部 基本编 第 1 章 设备概要
1-58
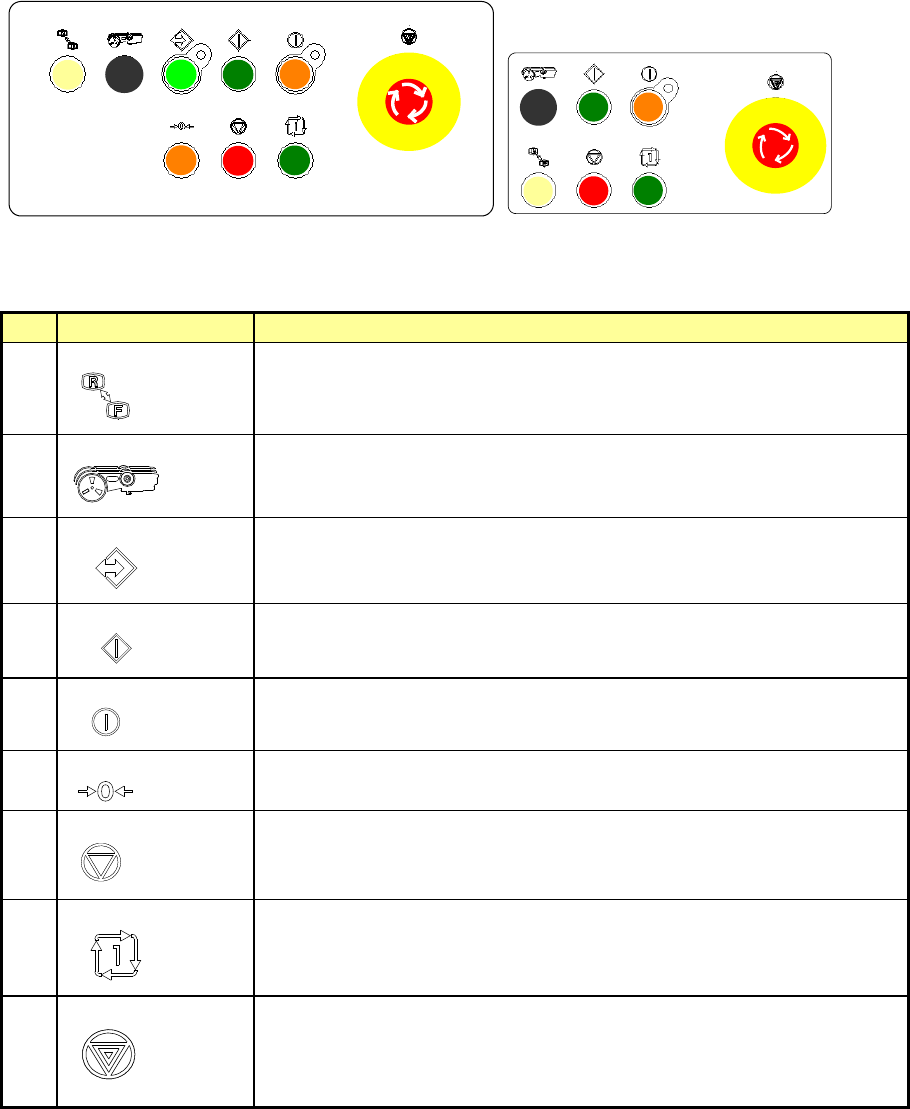
1-3-2-5 操作面板
可通过主机的操作面板来控制机器的动作。
<前面> <后面>
图 1-3-2-4 操作面板外观图
表 1-3-2-3 开关功能概要
No
开关名称
功
能
1
KEYBOARD
键盘
·切换<FRONT>、<REAR>的键盘操作。
·按下该开关, 则指示灯亮。
2
FEEDER
送料器
·切换送料器单元有效/无效。
·按下该开关,指示灯亮时为<有效>。
3
ONLINE
联机
·联机状态下指示灯亮。
4
(START)
开始
·进行生产或模拟生产运行时使用。
5
SERVO FREE
解除伺服
·用于使伺服马达(X 轴、Y 轴、Z 轴、θ轴)进入 Motor Free 状态。
·Motor Free 状态下指示灯亮。再按一次后马达被励磁。
6
ORIGIN
回原点
·进行全轴返回原点。
7
(PAUSE,STOP)
暂停,停止
·终止生产、模拟生产时使用。按一次暂停, 再按一次停止。
8
SINGLE CYCLE
单次循环
·一块基板生产结束即停止生产时按此按钮。
再按一次则解除该模式。
9
Emergency
紧急停止
·用于紧急停止。当装置出现异常动作或可能危及人体时,按下此开
关暂停机器。按下该开关后,马达及其他驱动部分停止工作, 红色信
号灯点亮。
按箭头方向旋转该开关即可恢复。