KE-2070_使用说明书.pdf - 第753页
第 2 部 功能详细编 第 9 章 手动控制 9- 18 2 )测量方法( 算法) (仅限于 KE -2080R 的右贴片头可以选 择此项) 从组合框中选择 执行 [ 测量 (SWEEP)] 时的激光器算法。 按 [Alt ] + [ ↓ ] 键后,显示以 下的列表。 算法,左侧显示 的数字为算法, 右侧的英文字 母为 SWEEP 时的 θ 旋转速度。 算法: 1(14 、 – 14) : 在当前位置进行预 旋转角度的逆 旋转, 在…
第 2 部 功能详细编 第 9 章 手动控制
9-17
灵活 2
根据测量结果,检出元件的左右对称轴,从该轴取
得元件的中心坐标、及角度偏差量,进行贴
片校正。
元件尺寸,根据上述计算测量出的角度偏差量,以
实际的元件角度 0°为基础,把测量结果中最大的
幅度判断为 X、Y 。
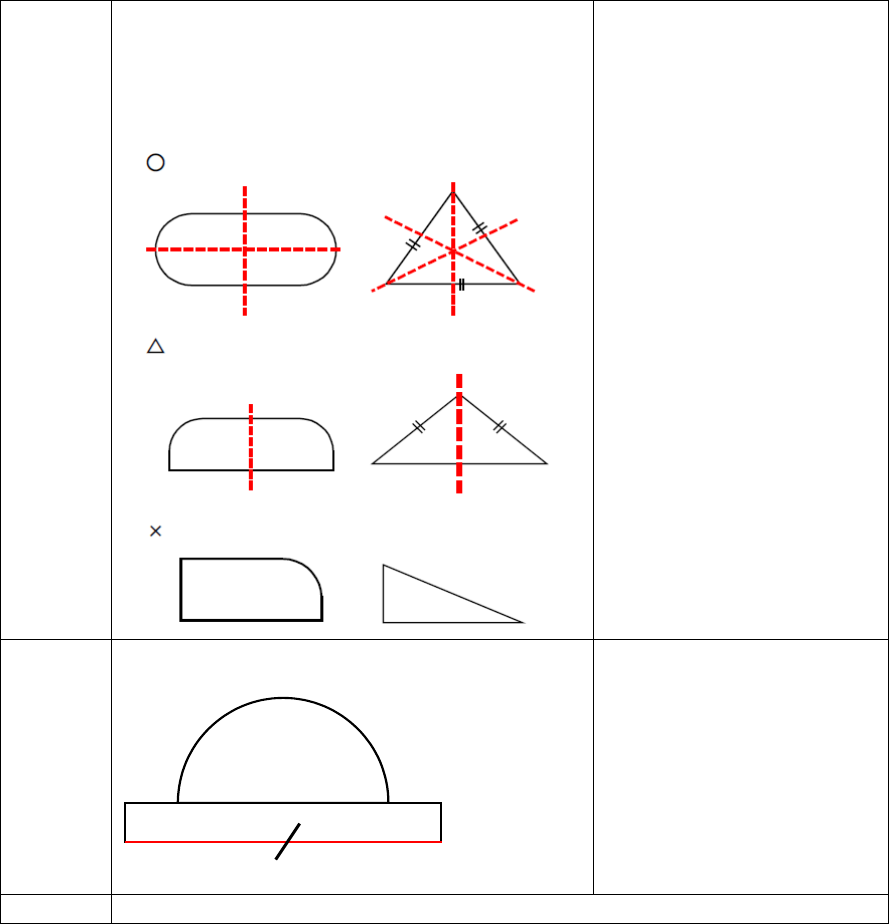
如果元件存在多个对称轴,
因能取得元件的准确的中心
坐标,此形状会非常有效
(例:左图「○」元件)。
对称轴为1 个时,由于无法
取得元件的Y 方向的准确的
中心坐标,有时会发生贴片
偏移(例:左图「△」元件)。
但是,由于此偏移量有再现
性,输入贴片偏移量的方法,
有时也可以使用。
如果元件没有对称性,此形
状无效(例:左图「×」元件)
。
灵活 3
用元件的最小幅度附近的数据计算XY 的幅度、位
移量。从元件的 X 方向的 1 边的倾斜取得角度。
异形元件
可识别许多异形元件,但如
果元件的上下带有圆形,角
度偏移值会变得不稳定。
不设置
根据吸取姿势按贴片角度转动并贴片。
第 2 部 功能详细编 第 9 章 手动控制
9-18
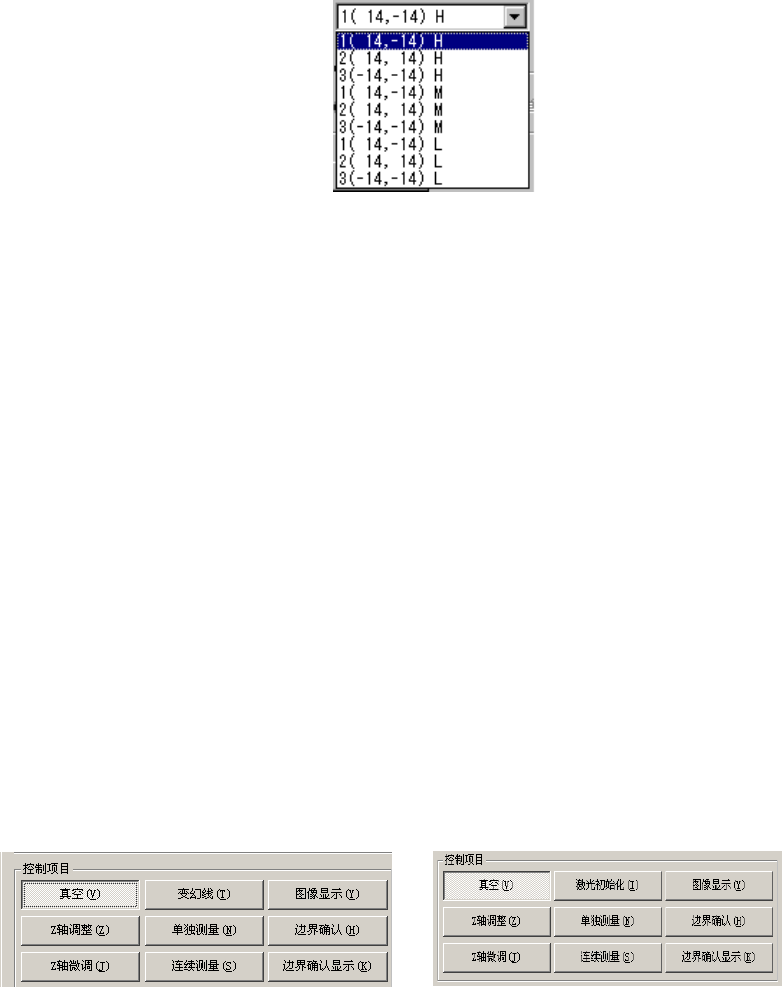
2)测量方法(算法)(仅限于 KE-2080R 的右贴片头可以选择此项)
从组合框中选择执行[测量(SWEEP)]时的激光器算法。
按[Alt] + [↓] 键后,显示以下的列表。
算法,左侧显示的数字为算法,右侧的英文字母为 SWEEP 时的 θ 旋转速度。
算法:
1(14、–14):在当前位置进行预旋转角度的逆旋转,在该位置旋转θ,找出影子宽度最小的位
置(第一次)。再从检测出的最小宽度位置起旋转 90 度,检测出第二个最小宽
度(第二次)。
相当于元件数据中设定的激光识别算法的算法 1。
2(14、 14):从当前位置进行预旋转角度的逆旋转,在该位置旋转θ,找出影子宽度最小的位
置(第一次)。再从检测出的最小宽度位置起旋转θ,检测出第二个最小宽度(第
二次)。
相当于元件数据中设定的激光识别算法的算法 2。
3(–14、–14):不旋转θ,在执行时的位置测量影子(第一次)。之后,在旋转后的位置测量
影子(第二次)。
相当于元件数据中设定的激光识别算法的算法 3。
速度
: H:高速、M:中速、L:低速
(3)控制项目
选择左 1~左 6 贴片头时 选择 2080R 的右贴片头时
第 2 部 功能详细编 第 9 章 手动控制
9-19
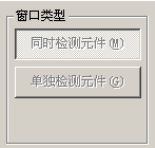
(4)窗口类型
按下按钮,选择测量时窗口类型。
在控制项目中选择“测量(ONCE)”、“测量(SWEEP)”以外项目时,不能设置。
同时检测元件:设置的窗口尺寸范围,必须可容纳同时测量多个 Head 的元件。
(这些 Head 的吸嘴旋转中心±7.5mm)
若要测量比该窗口尺寸更大的大型元件,请指定单独测量元件。
单独检测元件:设置的激光测量的窗口尺寸范围,必须可容纳最大尺寸的元件。
指定测量单独元件时,需要使用其他 Head 的测量领域(窗口)。因此,其他 Head
下降到激光的高度时,可能造成测量失败。测量前,务必检查,确认其他 Head
没有降到激光测量的高度。
(5) 控制按钮
用控制按钮来执行控制。
控制按钮的显示因控制项目而异。
在控制结束时更新状态显示。
1) 真空
控制所选Head真空的开/关。
选中控制项目的“真空”时,选择“开(O)”按钮、“关(F)”按钮、“开/关(/)”按钮或按
下“F3”键、“F4”键、“F5”键进行控制。
2) Z 轴调整
对所选Head的Z轴坐标进行控制。
吸嘴吸取元件时使用。
选中控制项目的“Z轴调整”时,选择“上(U)”按钮、“下(D)”按钮、“上/下(/)”按钮
或按下“F3”键、“F4”键、“F5”键进行控制。
3) Z 轴微调
对所选Head的Z轴坐标进行控制。
将吸取元件移动到激光测量高度等时使用。
选中控制项目的“Z轴微调”时,选择“上(U)”按钮、“下(D)”按钮、“LA面(/)”按钮或
按下“F3”键、“F4”键、“F5”键进行控制。