DECAN_F2_Service(Eng_Ver1).pdf - 第252页
12-2 Fast & Flexible Chip Shooter DECAN F2 Service Manual 1) If the trouble related to servomotor occur , alarm code is indicated on LED of front panel. 2) At this time, servo motor power is OFF . For the release of …
12-1
Motor Driver
Chapter12. Motor Driver
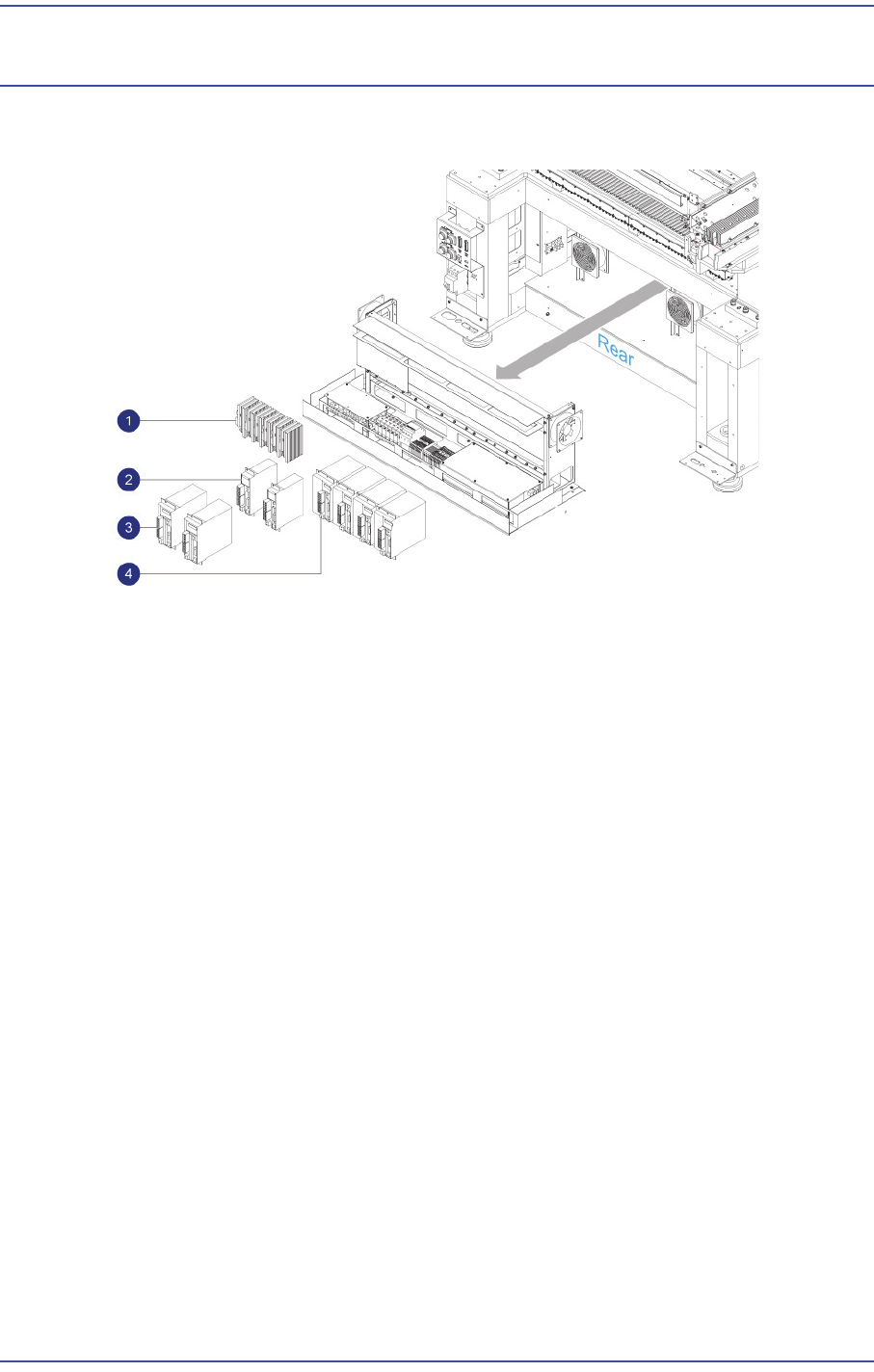
12.1. Part of Motor Driver
1: EP06-000390A(CONTROL-DRIVER-STEBRO-SPB-WW-V1.0)
EP06-000391A(CONTROL-DRIVER-STEBRO-SPB-ST-V1.0)
2: J31531051A(SERVO MOTOR DRIVER A5E MADHT1505E)
3: J31531049A(SERVO MOTOR DRIVER A5E MCDHT3520E)
4: EP06-000316(SERVO CONTROL DRIVER MDDHT5540LA2)
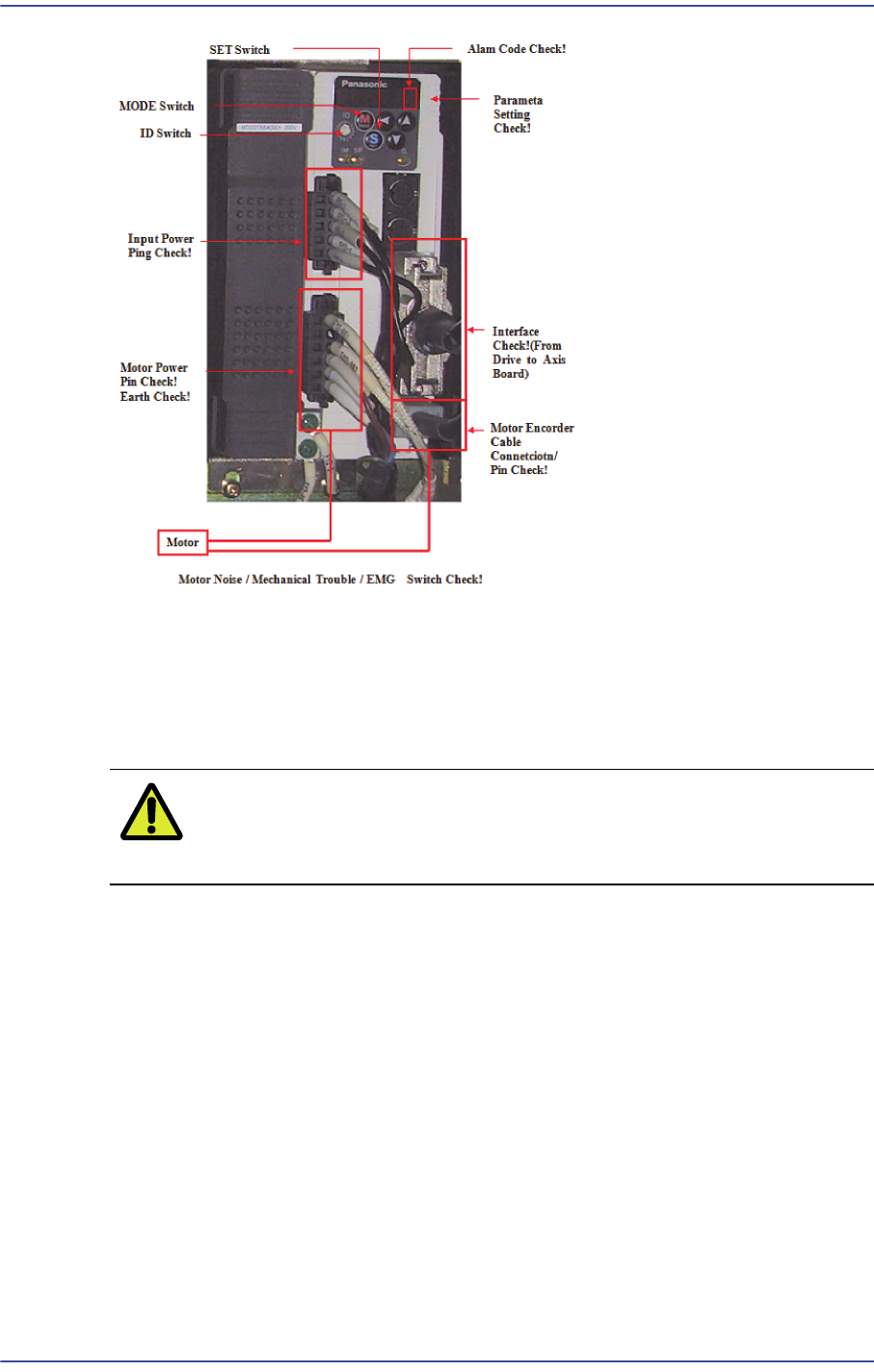
12.2. Servo Motor Driver Trouble Inspection
12.2.1. Checking Points for Servo Motor Driver Trouble
Occurrence of Abnormality -> Dynamic Braker /Motor Current /Servo Output /Alarm
Output -> Dynamic Braker Release
When this sequence is activated, motor stops and generate alarm.
12-2
Fast & Flexible Chip Shooter DECAN F2 Service Manual
1) If the trouble related to servomotor occur, alarm code is indicated on LED of front
panel.
2) At this time, servo motor power is OFF. For the release of the alarm, it is required that
procedure 1 [EMG Alarm: EMG -> STOP -> RESET -> READY] or procedure 2
[General Alarm: STOP -> RESET -> READY] is performed.
Caution For alarms related to power, turn off power and turn on
power.
3) For alarm caused by OVERLOAD, normal clear is possible in 10 seconds or more. So,
press the ‘READY’ button to supply power to the servo motor in 10 seconds or more
after pressing the ‘RESET’ button.
4) If troubles are caused by cable connection for the terminal of servomotor and improper
wiring, ensure that checking wiring is performed after motor power is off.
5) If the servomotor without mechanical problem does not drive, check if the parameter
is normal. And then if the same trouble ouccur again, replace the mortor drive.
6) If the drive of motor is not stable and acceleration/deceleration is improper, the
following checks should be performed;
Check if servomotor has mechnical problem
Check if servomotor parameter setup is normal
Check if the primary input voltage is acceptable

12-3
Motor Driver
Check if the state of cable shield is normal.
7) The unmatched origins may be caused by serious difference between Z phase and
Home sensor or the defective axis board. So check the connections of axis board
cables.
8) The causes of noise are mainly noise, parameter, and bad connection of cable, etc.
except mechanical causes.