DECAN_F2_Service(Eng_Ver1).pdf - 第599页
18-79 Machine Calibration the fly camera while rotating the head fro m -360 degrees to 360 degrees at 5 degree intervals. 9. The calibration is performed automatically . If it is complete d, the calibration result is dis…
18-78
Fast & Flexible Chip Shooter DECAN F2 Service Manual
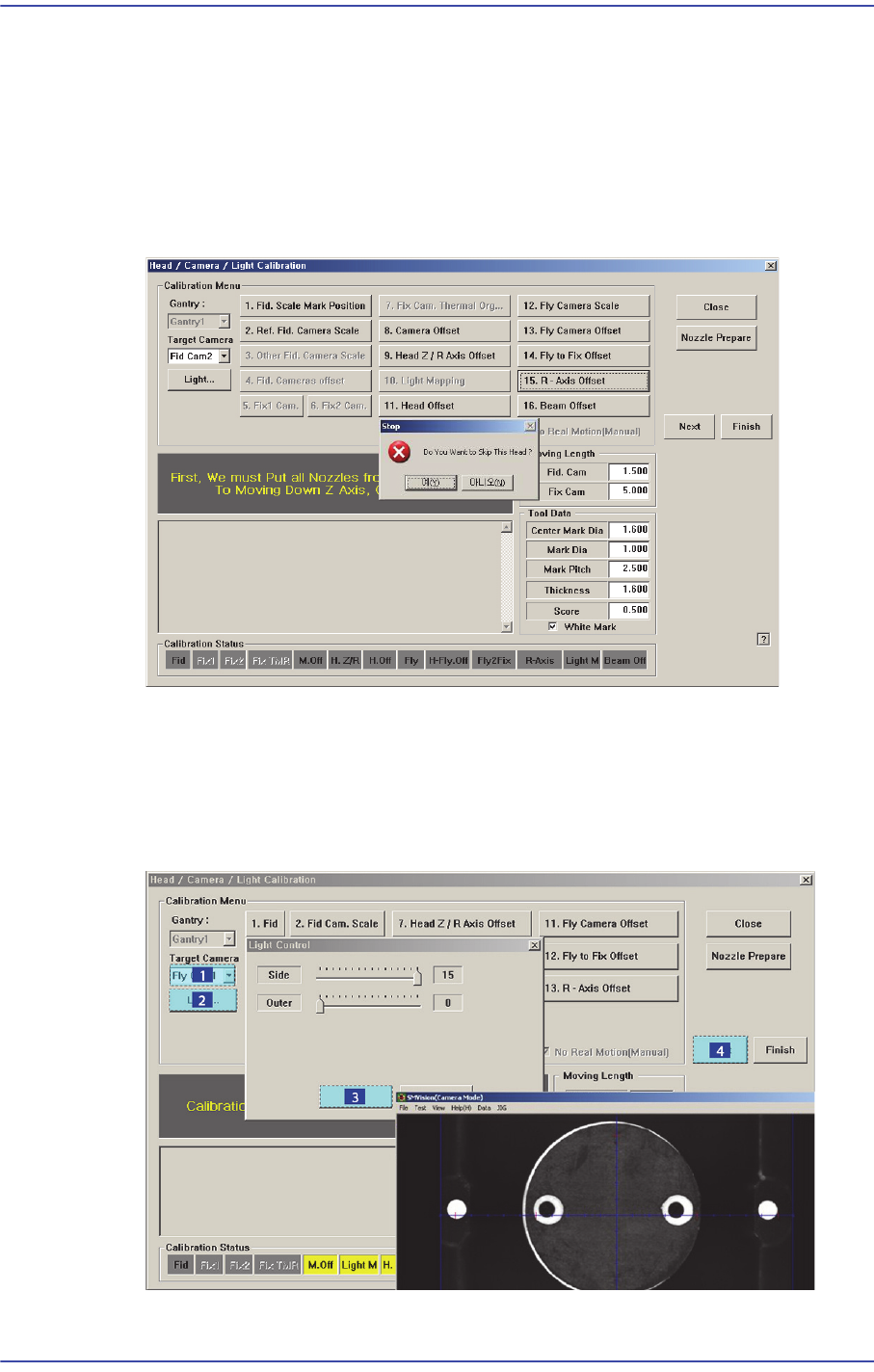
Moving Down Head. After Moving, Attach the Tool to Head Manually” appears.
Click the <Next> button after inserting the CN400 nozzle in the nozzle-holder of Head
#1 manually.
6. The message “Z Axis moving down…. Please Wait for a Moment.” appears, and the
dialog box asking whether to skip the calibration of Head1 is displayed. Click “Yes
(Y)” to skip or click “No (N)” to proceed with the calibration. And then click the
<Next> button.
7. The message “Calibration is Prepared. To Calibrate, Click [Next]” appears.
At this time, At this time select the ‘Fly1 Cam‘ in the <Target Camera> combo box
and, click the <Light…> button and adjust the brightness of the light in the ‘Light
Control’ dialog box so that the fiducial mark on the calibration tool that is seen in the
‘SMVision’ window can be seen clearly. Then click the <Next> button.
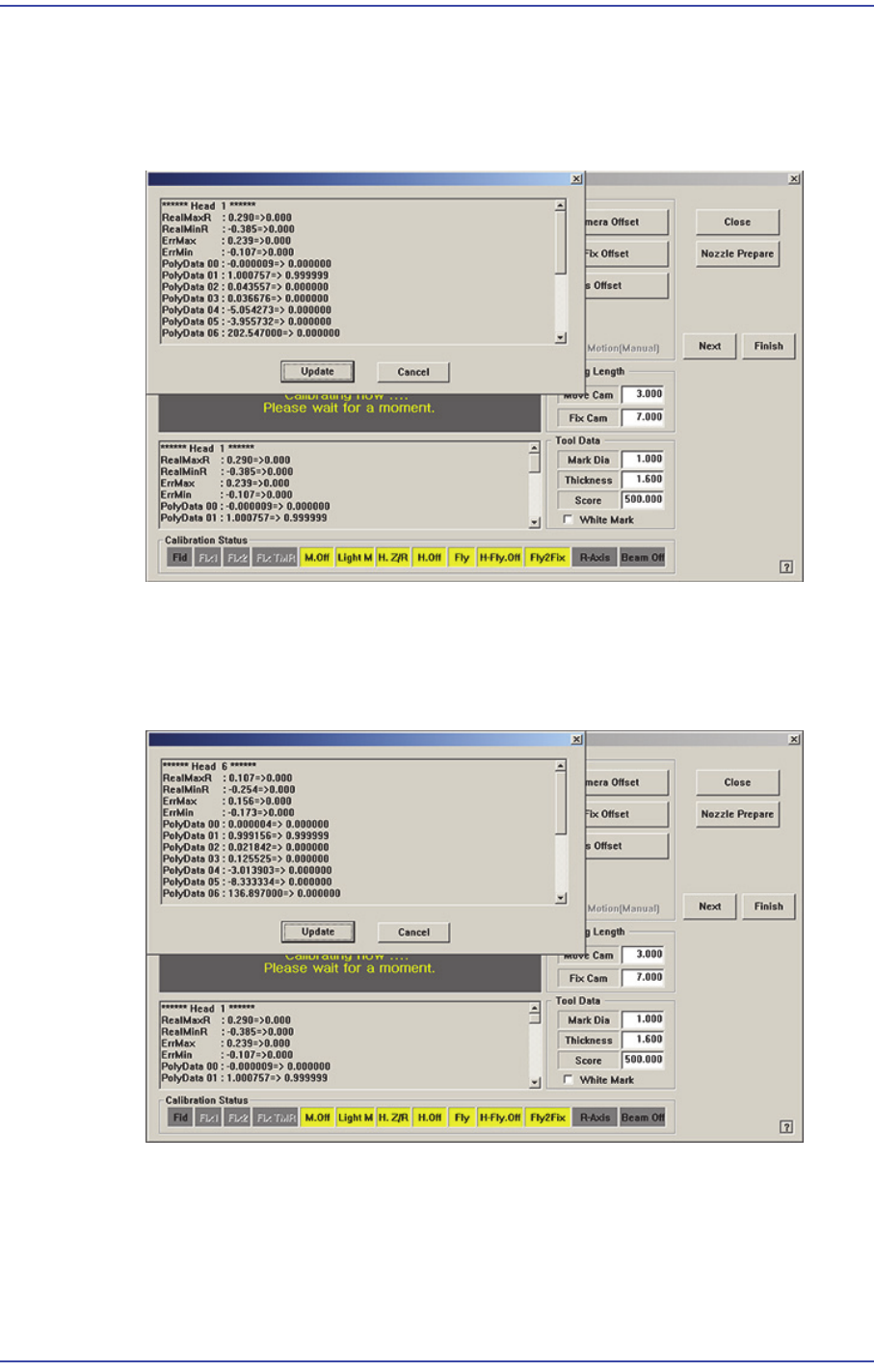
8. Recognize the 2 fiducial marks on the bottom surface of the calibration tool by using
18-79
Machine Calibration
the fly camera while rotating the head from -360 degrees to 360 degrees at 5 degree
intervals.
9. The calibration is performed automatically. If it is completed, the calibration result is
displayed as shown in the following figure.
10. .For Head #2 ~ Head #10, perform calibration in the same manner as it was performed
for Head #1.
11. .If the calibration procedure is completed for all heads normally, the result is displayed
as shown in the following figure.
12. .Select Gantry 2 in the <Gantry> combo box and perform calibration in the same
manner as has been done for Gantry 1.
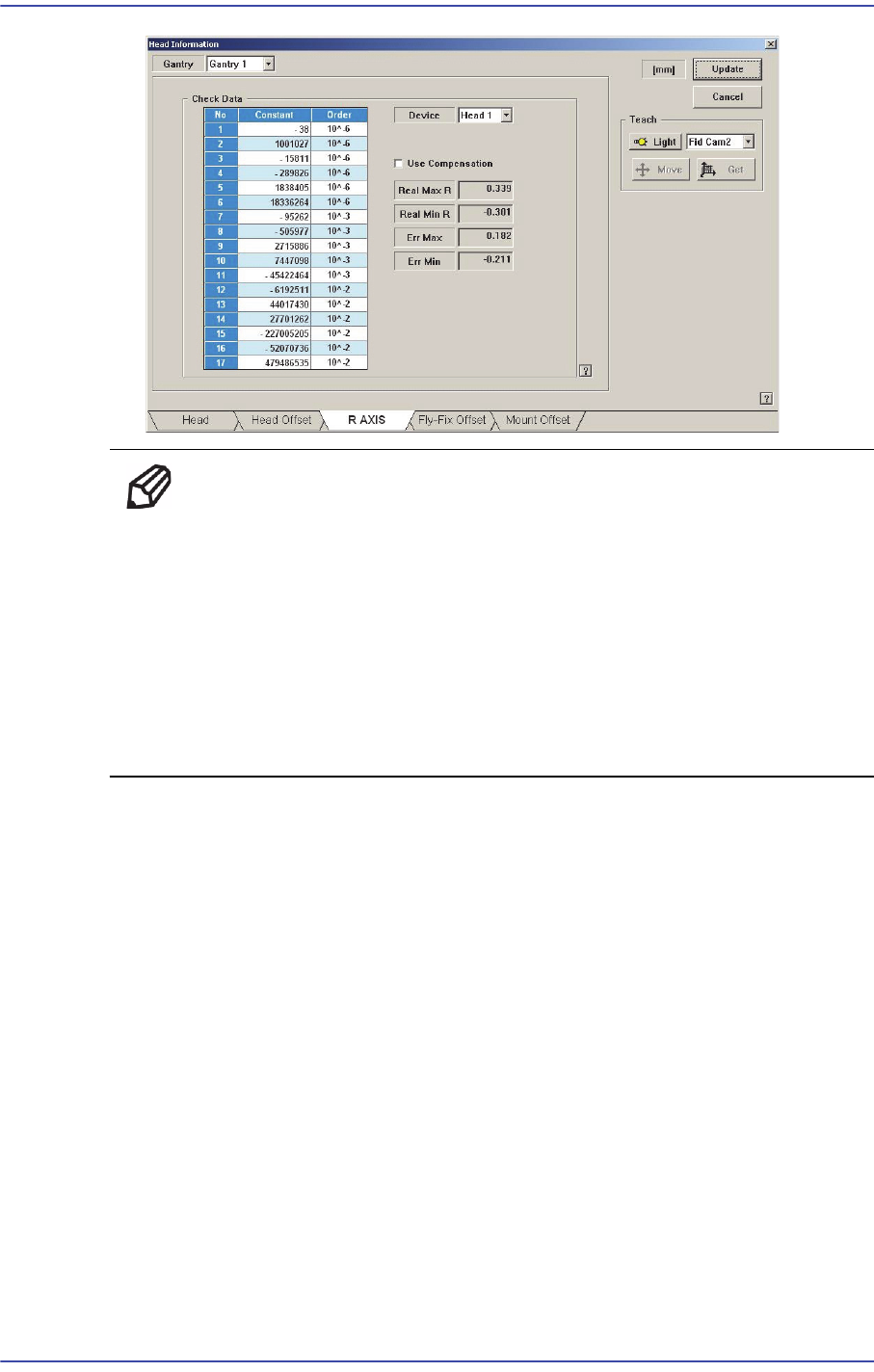
The measurement result can be confirmed in the R Axis dialog box.
18-80
Fast & Flexible Chip Shooter DECAN F2 Service Manual
Memo The reference values for the calibration of the R-Axis Offset is as
follows.
Real Max(Min): The Max.(Min.) offset between command value
and calibration value
Head1~Head10 : -1.0 ~ 1.0(deg)
Err Max(Min) The Max.(Min.) offset between compensation value
and calibration value
Head1~Head10 : -0.3 ~ 0.3(deg)
18.3.10.9. Beam Offset Calibration
Refers to the calibration measuring the distance between the fiducial camera sensor and
beam sensor. In order to measure the beam offset, the beam sensor to be used in the
<Head> tab of the System menu must be selected first.
Perform calibration of the Beam Offset in the following manner
1. Press the <16. Beam Offset> button to execute the beam offset dialog box.