DECAN_F2_Service(Eng_Ver1).pdf - 第439页
17-27 Troubleshooting Replace the DPRAM cable assembly . 17.3.4. Error related to conveyor (E08) E0800 An alarm related to the motor axis occur red [Cause] Defective motor power cable and encoder cable Defective se…

17-26
Fast & Flexible Chip Shooter DECAN F2 Service Manual
Set the PCB stop position the same as that of the existing machine and move the
stopper.
E0722 Timeout occurred during Msgdriver (MMI) communication
[Cause]
Defective Vision board
Defective LAN communication
[How to Check]
Replace the Vision board and check whether the same problem occurs
Check whether the Ethernet communication is properly made
[Measures]
Replace the PCI I/O board.
Connect the LAN cable properly or replace the cable.
E0723 A certain part is dumped even when a pickup error did not occur
[Cause]
Incorrect system constant setup
[How to Check]
Check the retry count of the pickup from the Common Data in the part editor and
check that the No. 9 System Constant is 5
[Measures]
Change the system constant. (No. 9: Change the OPT SIG PART EMPTY from 7 to 5.)
E0724 Timeout occurred during Msgdriver (MMI) communication (Applicable only to SM
series machines excluding the SM471 machines.)
[Cause]
The PCI IO board is defective. (Applicable only to SM series machines excluding the
DECAN F2, SLM, SM471 and SM48X.)
The cable connecting the CAN Master board and PCI I/O board is defective.
(Applicable only to SM series machines excluding the DECAN F2, SLM, SM471 and
SM48X.)
[How to Check]
Replace the PCI I/O board and check whether the same problem occurs.
Check whether the DPRAM cable is correctly connected. If its connection has no
problems, replace the cable and check whether the same problem occurs.
[Measures]
Replace the PCI I/O board.
17-27
Troubleshooting
Replace the DPRAM cable assembly.
17.3.4. Error related to conveyor (E08)
E0800 An alarm related to the motor axis occurred
[Cause]
Defective motor power cable and encoder cable
Defective servo motor
Defective motor pulley assembly(As the motor pulley set screw is loosened, the origin
point is changed)
Overload occurred due to chips and foreign materials on/around the ball screw of the
width adjustment axis
The home sensor and limit sensor are damaged
The conveyor cable is cut off
The system file related to the conveyer origin is damaged
Defective connection between the base control board and NCIO board
The voltage supplied from the power supply unit is defective
The cables connected to the motor and board are defective or the base control board is
defective.
[How to Check]
Check whether the motor power cable and encoder cable are properly connected. If the
cable has a problem, replace it and check whether the same problem occurs
Check whether the servo motor operates properly
Check whether the motor pulley is assembled properly
Check whether foreign materials exist on/around the ball screw and LM guide
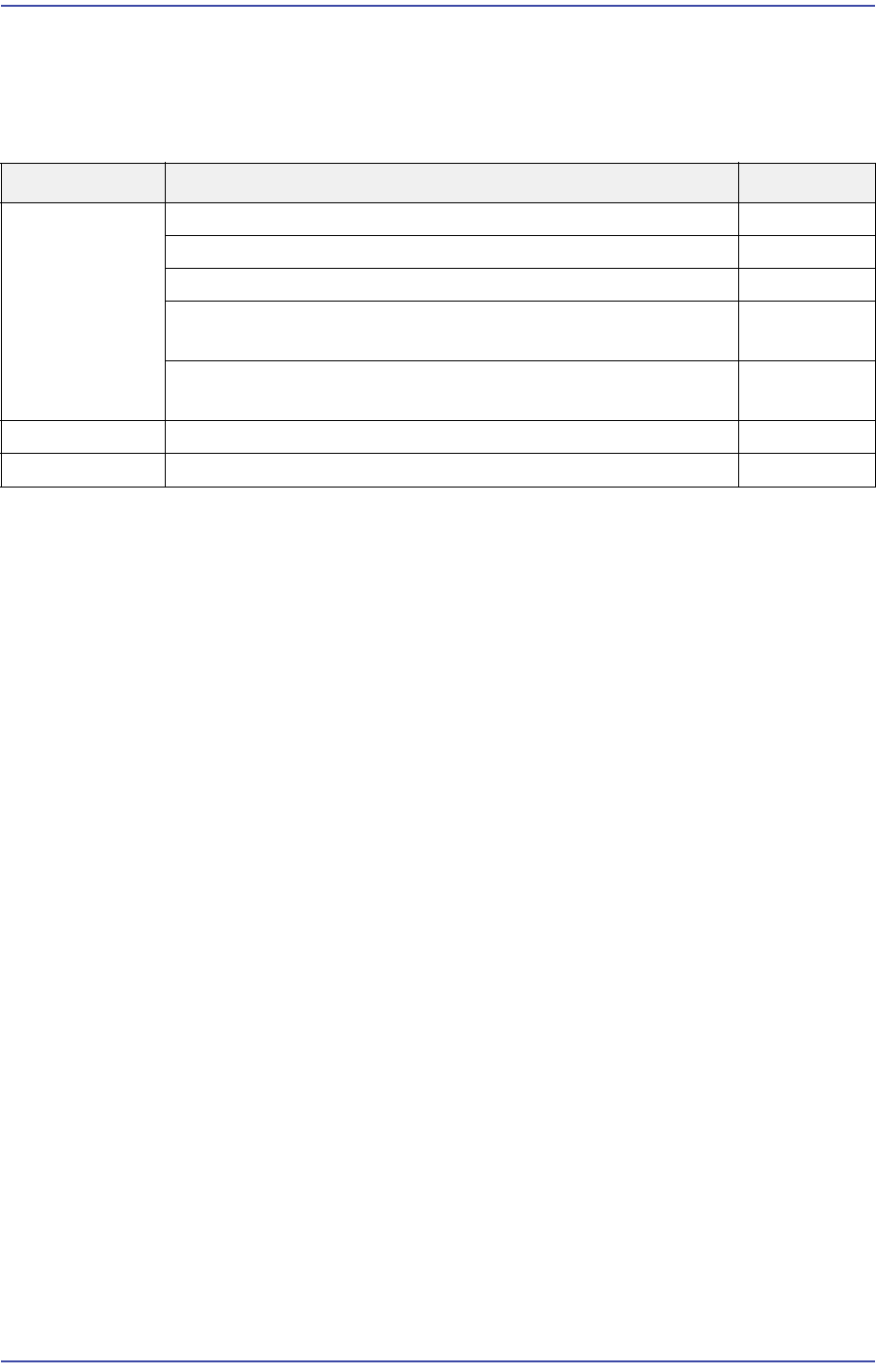
Cause Description Remarks
Error related to
conveyor
An alarm related to the motor axis occurred E0800
The BUT Up/Down error occurred E0801
The stopper Up/Down error occurred E0802
Axis homing error – “AMP is not enabled.” (Occurs when the
machine is at Ready On state)
E0803
The error, “The motor or origin position is changed,”
occurred
E0804
A STEF or STXF-S follow-up error occurred E0805
Parts jump while placing them E0806

17-28
Fast & Flexible Chip Shooter DECAN F2 Service Manual
Check the operation state of the home sensor and limit sensor. If they have a problem,
replace them and check whether the same problem occurs
Replace the conveyor cable and check whether the same problem occurs
Overwrite and recover the backup system file and perform calibration. Then check
whether the same problem occurs
Check whether the cable between the base control board and NCIO board is properly
connected. If it has no problems, replace the base control board and then check
whether the same problem occurs
Check the input and output (24V) of the power supply and replace the power supply
and then check whether the same problem occurs
Check the cable connection status. If it has a problem, replace the cable. If not, replace
the base control board and check whether the same problem occurs.
[Measures]
Replace the power cable of the corresponding motor and encoder cable.
Replace the servo motor.
Reassemble the motor pulley set screw and perform conveyor calibration.
Clean the ball screw and LM guide. Then apply grease to them and perform conveyor
calibration.
Replace the home sensor and limit sensor.
Replace the conveyor cable.
Recover the system file related to the conveyor origin position by overwriting the file
with the backup system file and perform conveyor calibration.
Replace the base control board.
Replace the power supply unit.
Replace the motor cable or base control board.
E0801 The BUT Up/Down error occurred
[Cause]
Since the height of the BUT Up detection sensor is not set correctly, the BUT Up
detection sensor fails to detect the up-movement of the BUT
Defective BUT Up detection sensor
Defective BUT Motor Driver
Since foreign materials exist inside the PCB guide, the clamp backup pin position was
changed. Therefore, a BUT Up error occurred
The position of the sensor dog detecting the BUT Up movement is not at the center of
the sensor but is off center. Therefore, it cannot detect the BUT Up movement
properly