RS-1_instruction manual.pdf - 第53页
Part 1 B asic O peration Chapter 1 Overv iew of the Machine 1- 35 Appli cable compone nts and packa ging st y le s (1) Appl icable compo nent size s <RS-1 /1R > Uni t: m m Recogn ition method Appli cable siz e Rema…
Part 1 Basic Operation Chapter 1 Overview of the Machine
1-34
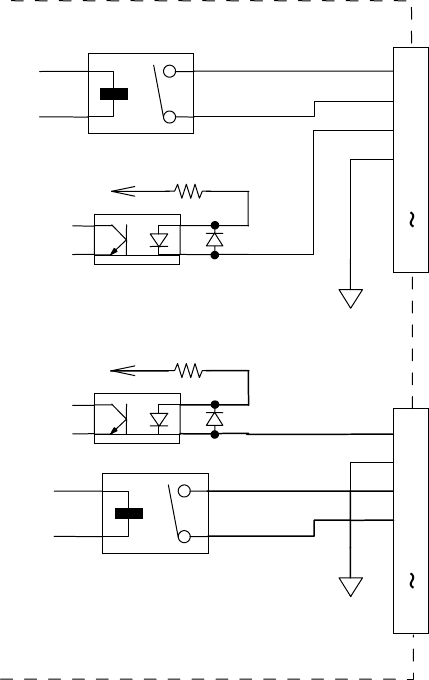
◇ The following figure shows the interface circuits for READY OUTs (IN) and BOARD AVAILABLE
signals.
They conform to the SMEMA standard.
GND(24V)
+
+
24V_
3.3K 1/4W
READY OUT +
BOARD AVAILABLE IN +
READY OUT -
BOARD AVAILABLE IN -
N.C.
1
2
3
4
5
14
READY IN +
BOARD AVAILABLE OUT +
READY IN -
BOARD AVAILABLE OUT -
N.C.
1
2
3
4
5
14
+
24V_
3.3K 1/4W
+
GND(24V)
Part 1 Basic Operation Chapter 1 Overview of the Machine
1-35
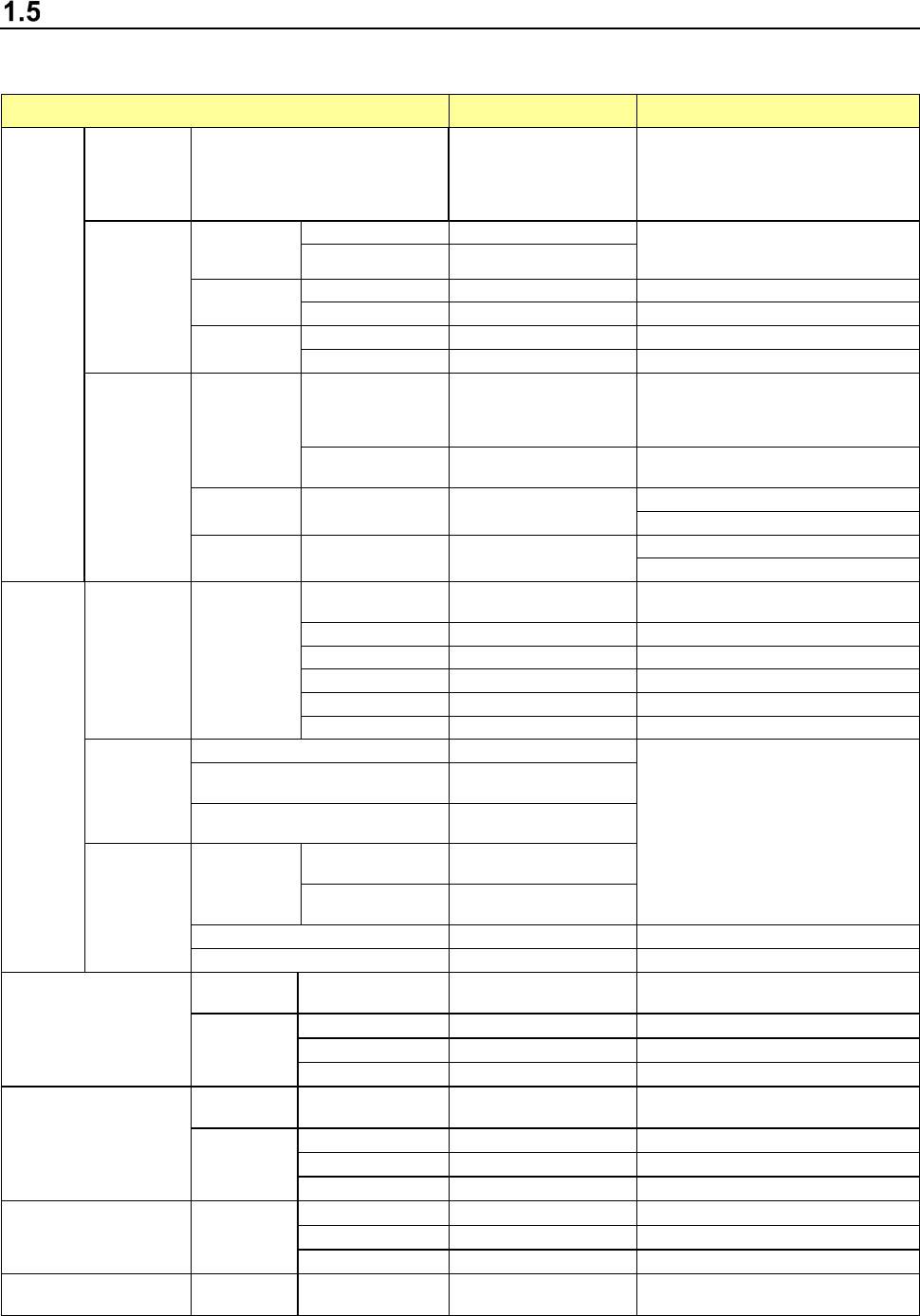
Applicable components and packaging styles
(1) Applicable component sizes
<RS-1/1R >
Unit: mm
Recognition method
Applicable size Remarks
Length x
width
Component
dimensions
Laser
recognition
LNC120-8 (Note 4) 03015 to □50
Note: If a 03015 component cannot
be recognized stably due to its shape
(for example, if a string art image is not
displayed normally), use a VCS (10-mm
field of view camera) (optional).
Batch vision
recognition
(See Note 1.)
54 mm view
camera
(See Note 2.)
Reflected illumination
□3.0 to □50.0
Mold size □1.7mm or more
Transmitted illumination □3.0 to □50.0
27 mm view
camera
Reflected illumination
1005~□24.0
Transmitted illumination
□3.0~□24
10 mm view
camera
Reflected illumination
0.25x0.125~□8
Transmitted illumination
□3~□8
Vision division
recognition
(See Note 1)
54 mm view
camera
Reflected illumination
Maximum: 50 x 150 (when
divided into 1 x 3)
□74 (when divided into 2 x
2)
Mold size □1.7mm or more
Transmitted illumination
Maximum: 50x120 (when
divided into 1 x 3)
Mold size □1.7mm or more
Short side 17mm or more
27 mm view
camera
Reflected illumination
~
24x72
(
1x3
)
~□48(2x2)
10 mm view
camera
Reflected illumination ~□16(2x2)
Component
height
Laser recognition LNC120-8
Category 1 0.05 to 1
See "(2) Recognition height of laser recognition
component".
Category 3
0.05 to 3
Category 6
0.05 to 6
Category 12
0.05 to 12
Category 20
0.05 to 20
Category 25
0.05 to 25
Batch vision
recognition
54 mm view camera
0.01 to 25
For the height restriction according to the
component size, see "(3) Recognition height of
image recognition component".
27 mm view camera
0.01
~
25
10 mm view camera
0.01
~
25
Vision division
recognition
54 mm view
camera
Diagonal line length,
less than 86
0.01 to 25
Diagonal line length, 86
or more
0.01 to 2.0 or 10.0
27 mm view camera
0.01
~
25
10 mm view camera
0.01~25
Lead pitch
Laser
recognition
LNC120-8 0.65 or more
Lead pitches and ball pitches cannot be
recognized by laser recognition.
VCS
recognition
(See Note 3)
54 mm view camera
0.38 to 2.54
27 mm view camera
0.20
~
2.54
10 mm view camera
0.2~0.5
Ball pitch
Laser
recognition
LNC120-8 1.00 to 3.00
Lead pitches and ball pitches cannot be
recognized by laser recognition.
VCS recognition
(See Note 3)
54 mm view camera
0.50 to 3.00
27 mm view camera
0.25~2
10 mm view camera
0.1~0.5
Ball diameter
VCS recognition
(See Note 3)
54 mm view camera
φ
0.3 to
φ
1.0
27 mm view camera
φ0.10~φ0.63
10 mm view camera
φ0.04~0.2
Lead length
VCS recognition
(See Note 3)
54 mm view camera 0.4 -
Lead pitches and ball pitches cannot be
recognized by laser recognition.
Part 1 Basic Operation Chapter 1 Overview of the Machine
1-36
Note 1: When the back light is used to recognize a lead, the lead looks thinner because completely
parallel light is not used.
For some area of the field view, the light illumination from the bottom is used as the back light
with being reflected onto the background plate of the head. Therefore, the lead looks further
narrower when it is positioned in the area lighted with the light from the bottom because the light
is reflected to the lead surface. In some case, the lead cannot be seen at all. As a result,
recognition of a lead with the back light is not guaranteed.
Note 2: The area to be recognized of the maximum-sized component shall be within the field view of □52
mm of a VCS including the component placement position error and a teaching error caused
when the component is picked up.
For the maximum size of the image recognition, the pick-up XY error shall be ±1 mm or less and
the angle error shall be ±3°or less.
When the image recognition applies to components with a size of more than □7 mm, the
components cannot be allocated to adjacent heads.
When a component is recognized with the back light, and the position 1.3 mm or less far from the
edge of the component is picked up, the shadow of a nozzle may prevent the component from
being recognized stably.
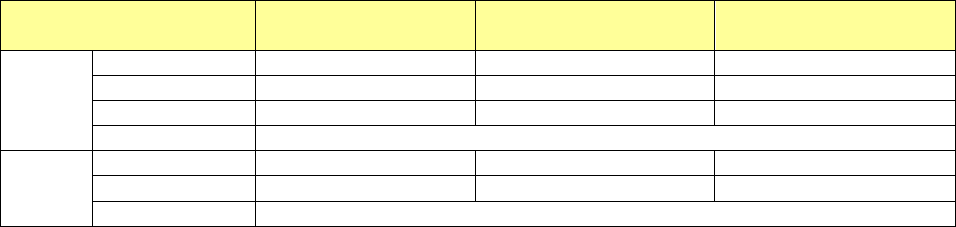
Note 3: The pitch of a general-purpose vision component type of lead component (multi connector, etc.)
and ball component that can be recognized in the follows.
Table Standard vision recognition specification
Component type
54mm view
camera
27mm view camera
10mm view camera
Lead
Pitch
0.50 to 22.0mm
0.3 to 11.0mm
0.2 to 0.50mm
Width
0.22 to 10.00mm
0.12 to 5.00mm
0.12 to 1.80mm
Length
0.40 to 10.00mm
0.20 to 5.00mm
0.20 to 1.80mm
Number
1 to 384pcs / 1 element group
Ball
Pitch
1.0 to 22.0mm
0.25 to 11.0mm
0.10 to 4.00mm
Diameter
0.40 to 5.00mm
0.10 to 2.50mm
0.04 to 0.20mm
Number
3 to 6936pcs / 1 element group