RS-1_instruction manual.pdf - 第553页
Part 1 B asic O peration Chapter 4 Cr eating a Produc tion Progra m 4- 218 4.5.6 .5 Pick position/Pick height These comm and s use the camer a to track the com ponent p i ck - u p position. Y ou can see the c omponent pl…
Part 1 Basic Operation Chapter 4 Creating a Production Program
4-217
(4) Operation during tracking
While the system is tracking a component placement position, you can use the following switches
and/or buttons to control the tracking operation.
Operation
Operation panel
Button on the screen
Start of tracking
<START> switch
<EXEC> button
Stop of tracking
<STOP> switch
Moving to the previous point
<Prev> button
Moving to the next point
<START> switch
<Next> button
End of tracking
Press the <STOP> switch when the
system stops.
Press the <CANCEL> button when the
system stops.
If you terminate the tracking operation with performing the operation above, the following message
appears on the screen.
(5) Displaying the superimpose screen
While the system is tracking a component placement position, it displays the component frame
whose size is appropriate for a component on the superimpose screen.
When the system is tracking a big component, it does not display this component frame but four
corners and the center position of the component one by one with a camera.
Display of the center and four corners of a component varies depending on the component size as
described below.
Component
size
Four corners of a component Center of a component
Component
whose shorter
side is 4.5 mm
or less
The window frame displayed on the screen indicates four
corners of a component.
A placement position whose angle was set is displayed by
rotating the window frame itself.
Center of the point at which
lines are crossed.
Other
components
(large
components)
The camera moves to each set of coordinates of four corners:
[TOP-L], [TOP-R], [BTM-R] and [BTM-L] in this order. For a
component placement position whose angle was set, the
camera moves to the coordinates obtained by rotating four
corners.
After the camera moves to
all of four corners,
[CENTER] is displayed on
the monitor. The camera
moves to the center of a
component.
(6) Teaching coordinates during tracking
In case the tracked coordinates are different from the actual ones, teaching can be performed by
touching on the superimpose screen of the touch panel.
The coordinates can be shifted in the 8 directions of up/down, left/right, and oblique.
The moving speed can be switched with the following buttons: <Low>, <Middle> and <High>.
When you press the <OK> button, the coordinates of the current position are fetched and
incorporated into the production program.
The center of a component or the frame
indicating four corners of the component is
displayed on the screen.
Part 1 Basic Operation Chapter 4 Creating a Production Program
4-218
4.5.6.5 Pick position/Pick height
These commands use the camera to track the component pick-up position.
You can see the component placement position displayed on the monitor, so you can use the HOD
to teach the placement position if the entered coordinates are not appropriate.
When you use the HMS, the system can track the component pick-up height also. In this case,
the system displays the values detected with the HMS on the screen sequentially.
If the tracked height is quite different from the specified one, teach the height as well as the
coordinates.
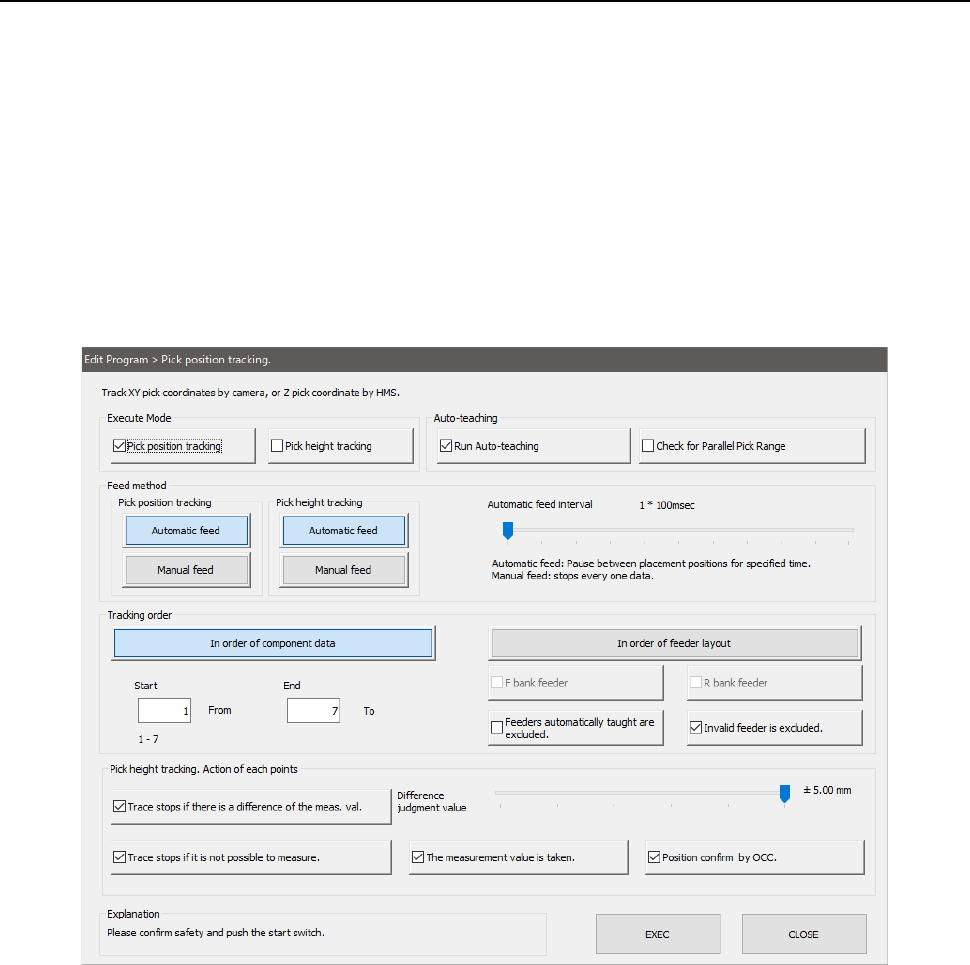
(1) Setting the tracking conditions
When you select the [Machine operation] command from the Program Editor menu, and
then the [Pick position] command, the following screen appears.
When you select the [Machine operation] command from the menu, and then the [Pick
height] command, the screen shown above appears on which the “Pick height tracking”
check box is checked off.
1) Execute Mode
a) Pick position tracking
The system tracks a component pick-up position with a camera.
b) Pick height tracking
The system tracks a component pick-up height.
* When both check boxes are checked off, the system tracks the pick-up height after
tracking the pick-up position with the camera.
Part 1 Basic Operation Chapter 4 Creating a Production Program
4-219
2) Auto-teaching
a) Run Auto-teaching
The system automatically teaches a component pick-up position.
b) Check for Parallel Pick Range
The system checks whether two or more components can be picked up simultaneously.
You have to execute the Optimization utility in advance. If you do not execute the
Optimization utility yet before pressing this button, the error message appears on the
screen that asks you to execute the Optimization utility.
3) Feed method
a) Automatic feed
Each pickup position is caught by camera or HMS at certain intervals. The camera stops for
the time of period specified with the “Automatic feed interval” slider bar described below,
then moves to the next position.
• Automatic feed interval:
Use this slider bar to adjust the stop time. You can set an interval from 0.1 second (100 ms)
to 20 seconds.
b) Manual feed
The operation is stopped at each pick position.
The operation is stopped at the current position until the user performs any operation.
When the <Prev> button is pressed on the pick position camera tracking screen, the
operation is returned to the previous pick-up position. When the <START> switch is
pressed, the operation goes to the next pick-up position.
4) Tracking order
a) In order of component data
Enter the tracking range from the starting point to the ending point by component data No.
By default, all components are to be tracked.
b) The order of feeder layout
Specify the position to be tracked in bank units.
c) Feeders automatically taught are excluded.
When you set this check box to ON, the camera tracks a component pick-up position on
feeders except for the feeders automatically taught, and then tracks the component pick-up
height.
d) Invalid feeder is excluded.
When you set this check box to ON, the camera tracks component pick-up from feeders that
are not set to be skipped with Placement data, Component data, and/or Pick data, and then
tracks the component pick-up height.
5) Action of each points ("Pick height tracking")
You can specify an action to be taken after moving to each tracking point.
a) Trace stops if there is a difference of the measurement value.
When a difference between the detected value measured by HMS and the pickup height
value set in the pick data exceeds the allowable range set in the “Difference judgment value”
field, a message is displayed and the operation is stopped.
Set the upper limit/lower limit range of (Difference judgment value)( +/-) by the slider bar.
b) Trace stops if it is not possible to measure.
If the HMS cannot measure the pick-up height (for example, because there is no component
at the measured pick-up position), the message appears on the screen to stop the tracking