RS-1_instruction manual.pdf - 第582页
Part 1 B asic O peration Chapter 4 Cr eating a Produc tion Progra m 4- 247 5) Result of inspect An inspect ion result is display ed. When vis i on cen tering is succ essfully complete d, "OK" is displayed. Othe…
Part 1 Basic Operation Chapter 4 Creating a Production Program
4-246
4) Light MEAS.
If a component connect be recognized with the default lighting brightness, the optimum
lighting conditions are obtained.
• Light Set
Set the detailed lighting conditions for measurement of the light.
This setting is used to obtain the optimum lighting conditions by setting lighting
individually.
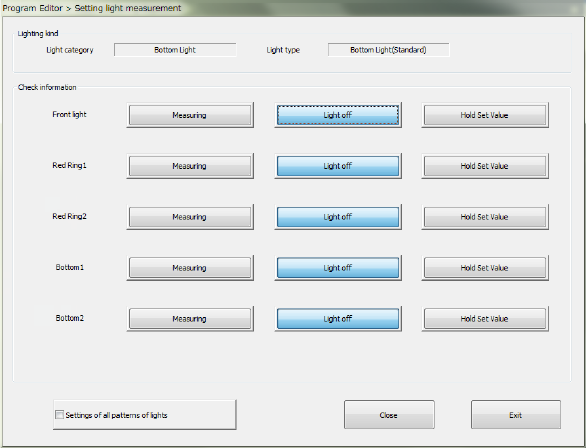
a) Lighting kind
The light category and the light type set in the light data are displayed here.
b) Check information
The list of lights is displayed here.
The buttons <Measuring>, <Light off> and <Hold Set Value> are arranged for each type
of light.
You can select only one of these buttons. The <Measuring> button is enabled by
default.
<Measuring>: Measures the corresponding type of light.
<Light off>:
Turns off the corresponding type of light, and then measures it.
When the system finishes measuring the light normally, the setting for turning off the
light is made in the light data.
<Hold Set
Value>:
Fixes the setting of the light amount of the corresponding type of light to measure the light.
c) Settings of all patterns of lights
When you check off the check box “Setting of all patterns of lights,” the system measures
the light for which the <Measuring> button is set with performing all operations enabled
with the buttons: <Measuring>, <Light off> and <Hold Set Value>.
If the <Light off> button or the <Hold Set Value> button is selected for the light, only the
current setting is enabled without performing the operations described above.
By default, this check box is not checked off.
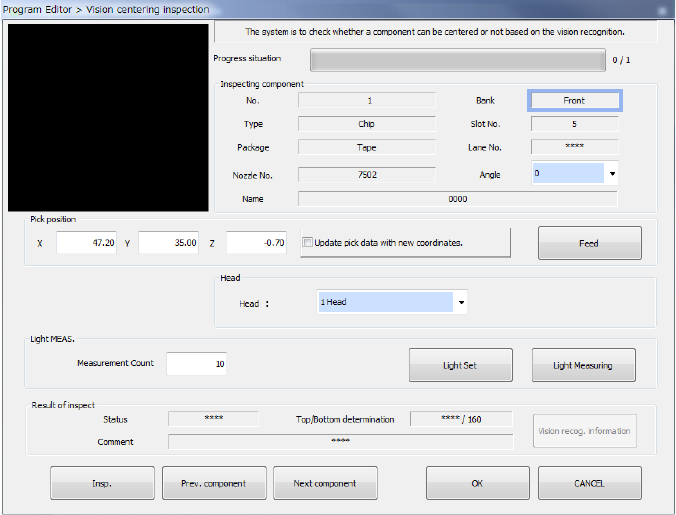
• Lighting measuring
The optimum lighting conditions for recognizing a component can be automatically
measured.
Part 1 Basic Operation Chapter 4 Creating a Production Program
4-247
5) Result of inspect
An inspection result is displayed. When vision centering is successfully completed, "OK" is
displayed. Otherwise, "NG" is displayed and the cause of the error is displayed in the
"Comment" field.
6) Insp.
Vision recognition inspection is executed. At completion of the inspection, an inspection
result is displayed.
7) Prev. component and Next component
When there is an alternative component, the processing is moved to the alternative
component.
8) OK
After the inspection result is incorporated, the previous screen reappears.
9) Exit
After vision recognition inspection is finished, the previous screen reappears.
(4) When the side of a square chip component, front or rear, is decided
If you select “The mean value is bright” for the menu item “Inspection algorithm” and execute the
<Insp.> button when the side of a square chip component is decided, the screen changes as
shown below.
1) Result of inspect
The new item for indicating the determination of the component side, front or rear, is
displayed on the screen additionally. “***/threshold value” is displayed by default. When
you execute the inspection, and obtain a measurement value that exceeds the threshold
value, “OK” is displayed instead of “***.”
When the obtained value is equal to or less than the threshold value, “Measurement
result/threshold value” is displayed on the screen.
In this case, the system fails to recognize the component, and the item “Status” shows “NG.”
Part 1 Basic Operation Chapter 4 Creating a Production Program
4-248
4.5.7.4 Coplanarity Inspection (option)
This command runs a coplanarity check.
(1) Coplanarity check system
When you select the commands [Vision Recognize] command and the [Coplanarity Inspection]
command in this order, the machine executes the control process in sequence based on the
values set in Component data, and checks to see if any error does not occur.
(2) Operations to be performed when a coplanarity check is run
1) Head used to pick up a component
A head used to pick up a component is automatically selected.
A nozzle already attached on a head is used in priority to other nozzles so that a nozzle can
be replaced with another one as infrequently as possible.
The machine may use a different nozzle every time it performs measurement depending on
the nozzle attachment conditions.
You can select a head to be checked also
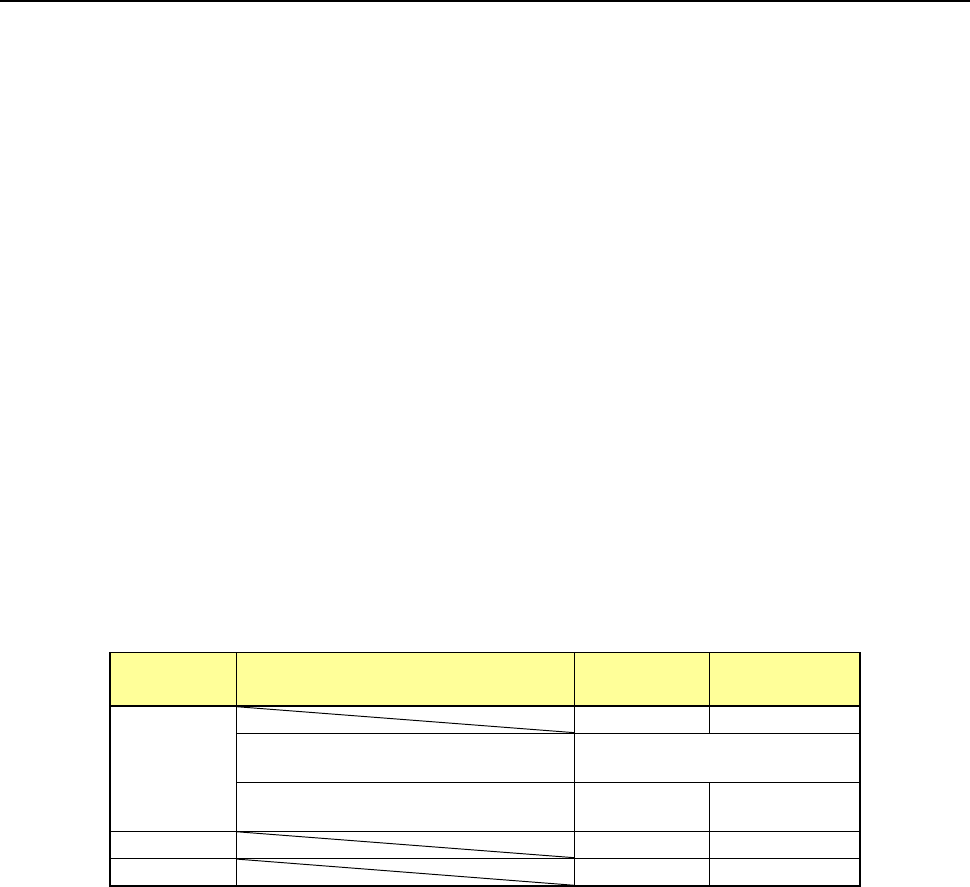
2) Returning a component after a check
The machine returns a checked component to its original position in some cases, and may
discard it in other cases. Which action is to be taken is decided according to the packaging
style of a component as shown in the table below.
Where to discard a component is determined according to the setting of the “Component
reject to” field of the Component data. When the machine returns a component whose size
is 1 mm or less, it may cause a tombstone problem or it may be turned over. Therefore, the
machine displays the “Question” dialog box to ask you which action to be taken.
Packaging
style
Condition 2
Returning a
component
Discarding a
component
Tepe
―
○
The shorter side length of the
outer dimensions is 1 mm or less.
Query * 1
The shorter side length of the
outer dimensions is 1 mm or more.
○ ―
Tray
○
―
Stick
―
○
*1 The system displays the dialog box on which you have to select whether to return a
component or discard it. The system displays this dialog box before it starts continuous
measurement of components in Continuous Measurement mode.
3) Selecting a component supply unit
If two or more component supply units are assigned to the same type of component in Pick
data, a component starts being picked up based on the data you entered first by default.
You can change a component supply unit intentionally also.
4) Changing the coordinates of a component pick-up position
If the system cannot pick up a component normally, you can manually enter a component
pick-up position or teach the coordinates of the pick-up position to change it.
5) Manual pick-up of a component
If there is no Pick data created, you can manually attach a component to the nozzle. In this
case, you cannot enter any pick-up coordinates. You cannot operate a feeder either.